双体风机安装船的稳性分析
2012-05-07郑鹏翔
郑 鹏 翔
(上海佳豪船舶工程设计股份有限公司,上海 201612)
0 引 言
随着国民经济的快速发展,电力需求迅猛发展,在国际社会都在倡导绿色环保的今天,风力发电作为一种新型的清洁能源备受关注。我国海岸线漫长,拥有丰富的海上风力资源,要大力发展海上风电,开发新型风机安装船刻不容缓。
1 船 型
双体风机安装船为一艘中心起吊式双体起重船,兼具风机基础的打桩功能,配备4台舵桨推进装置,箱形船体、纵骨架式、单甲板钢质焊接结构(机舱为双层底结构)。考虑到起重作业的特殊需要,该船由2个宽为16m的片体组成,2片体间隔为18m,2个双片体由连接桥连接。不仅适用于沿海大功率风机的整体移位、安装和风机分体安装,也可用于风机基础的安装。
该船入CCS(中国船级社)级,适用于沿海水域环境条件下的起重作业,适应作业水深在3.2~30m的范围。满足国内近海航区无人拖航调遣要求,并具有沿海作业自航的能力,见图1,其尺度见表1。

表1 双体风机安装船主尺度 m
2 完整稳性计算
鉴于该船兼具双体船和起重船2种船型的特点,在中国船级社CCS和国际规范规则中还没有特殊船型的稳性校核标准,考虑到该船的作业功能和船型特点,其航行工况的完整稳性的衡准应满足中华人民共和国海事局《船舶与海上设施法定检验规则》(国内航行船舶海船法定检验技术规则2004及其修改通报,以下简称法规)[1]中的双体客船的部分要求。作业工况按起重船的作业稳性衡准来校核。对避风稳性衡准要求,因该船具有沿海自航能力可以不做计算。

图1 双体风机安装船
用NAPA程序来进行稳性计算,其宏的编写功能在这类无明确衡准定义的船舶稳性计算中给予了很大的方便。即可以挑选和编写需要的衡准来校核船舶装载工况的稳性是否满足要求。
3 作业工况稳性衡准
该船安装风机、打桩、起重作业的时候,按照起重船的作业稳性衡准来进行校核。法规对此也作出了相关规定:

式中:GM——初稳性高度,并计及自由液面于悬吊重物对初稳性高度的影响,m;
Mf——起重船承受的风压倾侧力矩,kN·m;
Mh——旋转式起吊荷重倾侧力矩,kN·m;
Ml——船舶不对称装载倾侧力矩,kN·m;
θc ——起重船允许的极限静倾角,(°);
Δ——所核算装载情况下的排水量,t;
Kc——稳性衡准数;
lq——最小倾覆力臂,m;
lf——风压倾侧力臂,m。
参照法规 3.10.6条[2]要求,最主要的问题就是对最小倾覆力臂的计算,由于CCS的一些特殊衡准是参照前苏联的计算方法来校核船舶稳性,与国际上用GZ(静稳性力臂)曲线上面积大小和比值来校核稳性有较大的区别,且 NAPA软件中没有最大复原力臂这一参数的计算。根据规范对最小倾覆力臂 Lq的求解原理的描述,采取从一个固定点(可以是原点,或者是横摇角对应的动稳性曲线上反方向的点)分别到动稳性曲线正稳性范围上选取一系列点(点选得越多,结果越精确)连条直线,来计算直线的斜率大小,并选取斜率最大值所对应的动稳性曲线上的点,此点就是 Lq计算在动稳性曲线上选取的点,具体计算原理如图2所示。
图2中,A为原点,B为切点,求AB线的斜率就是最小倾覆力臂 Lq,由此可根据规范选取最小倾覆力臂的要求来求得最小倾覆力臂的值,再与风压力臂和倾侧力矩引起的倾侧力臂做比较。在NAPA中计算最小倾侧力臂和风倾力臂宏的编制原理说明可参照文献[3]。
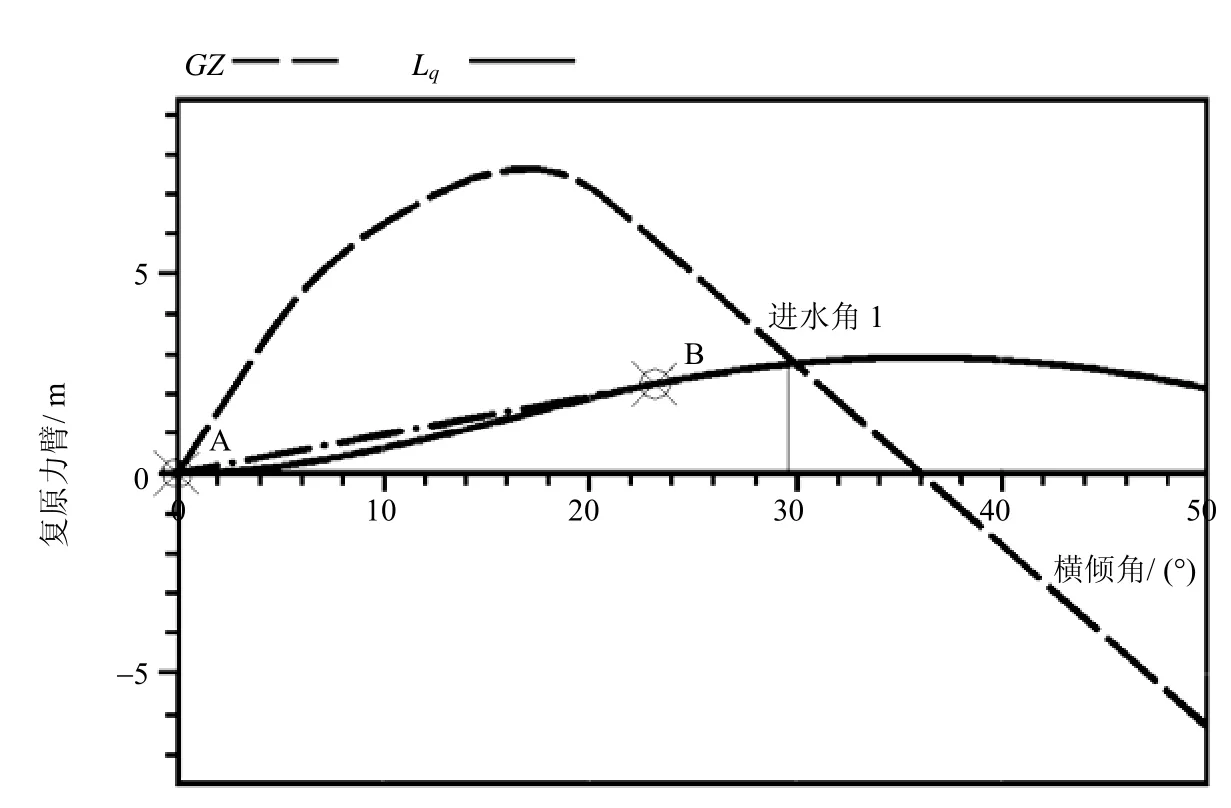
图2 NAPA软件计算复原力臂原理
4 航行工况的稳性衡准
该船航行工况按照法规第七章3.3条中双体客船的部分稳性衡准校核稳性指标,具体如下:

式中:K1——双体客船稳性衡准数;
lq——最小倾覆力臂,m;
lf——风压倾侧力臂,m。
风压倾侧力臂计算按第七章第2条的规定。
对于片体舷侧线型在水线附近呈直壁式的双体客船(本船就是这个类型),其最小倾覆力臂 lq可按下式计算:

式中:GM——所核算装载情况下船舶计及自由液面修正的初稳性高度,m;
θj——所核算装载情况下船舶的进水角,(°);
θ1——所核算装载情况下船舶的横摇角,(°)。
横摇角θ1的求解公式可以参照法规中的公式来计算,但是在进水角θj的计算过程中,有一些装载工况的进水角不存在,且该工况也没有超过最大吃水,纵倾也比较小,但在进水角曲线上却可以找到与吃水对应的进水角,见图3。
其他工况的进水角数值与进水角曲线上对应的进水角都不一致,经过检查发现那些不存在进水角的装载工况和装载工况得出的进水角与进水角曲线中的进水角差别比较大的工况都有一个共同的特点,就是重心都比较高。一般进水角的计算与装载工况的重心高度无关,只与进水点位置和船形有关。通过假设一些相同吃水和浮态、重心高度从低到高的工况进行比较,其结果见表2。稳性曲线如图4所示。
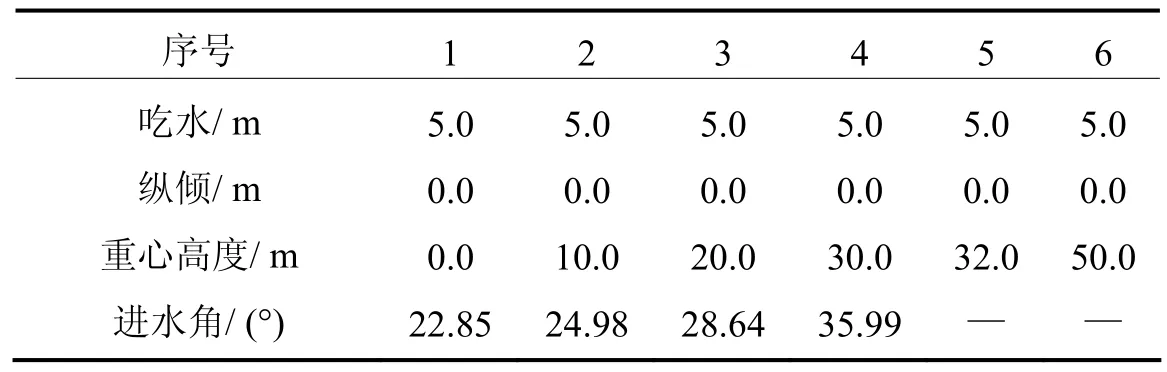
表2 相同吃水和浮态不同重心高度下的进水角
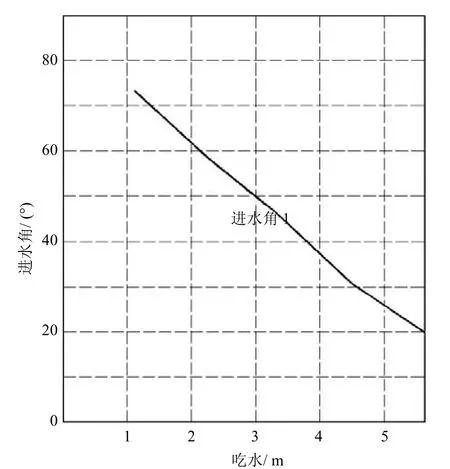
图3 不同吃水下进水角曲线
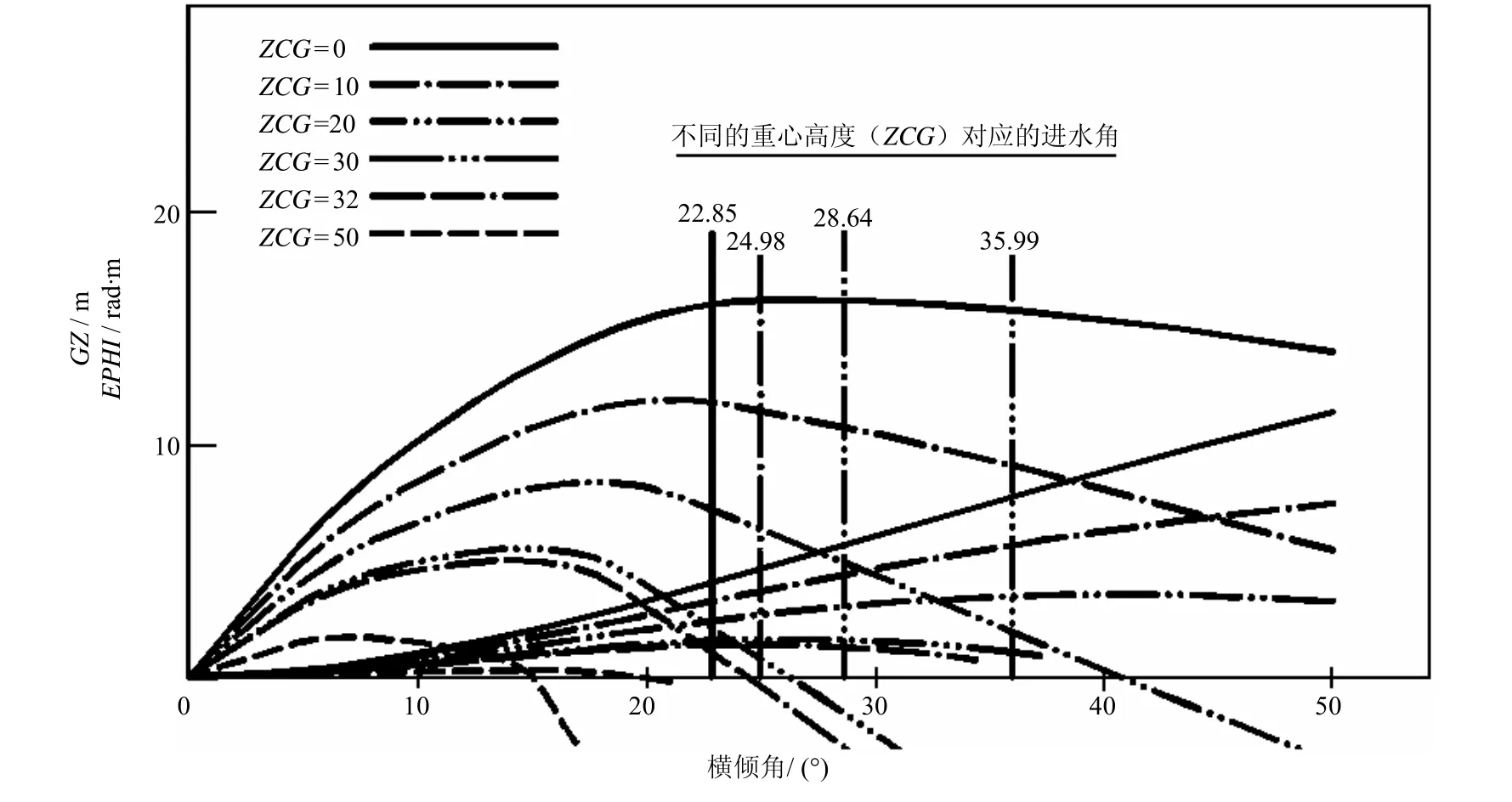
图4 各重心高度稳性曲线
从中得出产生此现象是在求船舶进水角曲线的过程中假设了船舶在横倾过程中是平浮的,但船舶在横倾过程中会有纵倾的[4]。船舶在倾斜力矩的作用下产生横倾,如果倾斜力矩是静力性质的,那么,倾斜力矩刚好和船舶本身的复原力矩相平衡,倾斜力矩所做的功就转化为船舶的位能。根据最小位能原理,船舶是保证不了在横倾的过程中保持平浮的(除非船舶艏艉形状完全一致,且船舶初始状态完全平浮),双体船在横倾过程中水线面的变化比单体船更大(特别是在片体入水和片体出水的情况),所以双体船在横倾过程中产生的纵倾要大很多,以致使进水角随着不同的纵倾有不同的变化。重心高度的大小也是影响纵倾程度的因素之一,表3明显反映了这个情况。
表3中没有产生进水角的装载工况就是因为在船舶横倾到进水点之前,船舶已经倾覆,所以就产生不了进水角了,一般在单体船的计算中,这个问题不太明显。经过验证,单体船在进水角的计算过程中考虑此影响和假设平浮所求的进水角(单位取度)误差一般都在小数点之后的位数,所以可忽略不计。表3是该船重心高度为30m对应装载工况因横倾而产生的纵倾情况。

表3 横倾自由纵倾对应表
表3中37.2°的情况时,船已有51.403m的纵倾,如此大的纵倾使该船早已倾覆,对于静稳性的计算没有意义。而此时的进水角35.99°还是在横倾角数据的范围之内,因此再大的重心高度的工况船舶在倾覆时进水点还没接触水面,以致无法产生进水角数据。
由上面的分析可以知道有的装载工况无法产生进水角,而在规范中最小倾覆力臂ql的计算公式中又包含进水角,所以规范中最小倾覆力臂ql的计算公式对该船已不适用,究其原因以前法规是为了计算方便,假设船舶横倾的时候不产生纵倾,各个工况的进水角与进水角曲线相一致。但在计算软件不断发展和国际海事组织对稳性需考虑纵倾因素的今天,该船的最小倾覆力臂按一般船舶的倾覆力臂来确定比较合适。具体方法见本文倾覆力臂的计算,其中横摇角的计算按照法规3.3条中双体客船的具体公式来计算。
5 结 语
利用NAPA软件宏的编写功能对稳性进行分析,计算结果表明,该船的完整稳性能满足相关法规的规定,并且有一定的富裕度。因此,NAPA软件在双体风机安装船完整稳性计算中的应用是成功的。
进水角的计算在双体船和单体船上有比较大的差异,在双体船以及类似的多体船的进水点定义过程中应特别注意,因为横倾过程中会产生比较大的纵倾,所以还要考虑进水点纵向位置的影响,选取多个可能危险的进水点予以计算。
[1] 国际海事组织.2008年国际完整稳性规则(2008年IS规则)及其解释性说明[S].北京:人民交通出版社,2009.
[2] 中华人民共和国海事局.船舶与海上设施法定检验规则,国内航行船舶海船法定检验技术规则[S].北京:人民交通出版社,2004.
[3] 李彤宇,盛庆武.NAPA软件计算起重船作业状态稳性衡准数的方法[J].船舶,2010, (5): 5-8.
[4] 马 强.多体船破舱稳性研究[D].上海:上海交通大学,2008.