变形监测在重庆市五童路小石坝高架桥应急抢险工程中的应用
2012-04-29郝中峰
郝中峰
摘要:本文以重庆市五童路小石坝高架桥应急抢险工程为实例, 简述变形监测常规大地测量方法在大桥变形监测中的应用以及其在桥梁安全隐患分析评估中的作用。
关键词:变形监测;智能机器人;基准网;变形点
0引言
变形监测是利用测量仪器对变形体的变化状况进行监测的工作,其目的是要获得变形体的空间位置随时间的变化特征,同时还要解释变形的原因。变形监测研究的对象范畴很大,可以包括全球性和区域性的变形体,也可以小到一个工程建(构)筑物。变形监测的测量方法主要有:常规大地测量方法,GPS方法,数字近景摄影测量方法,激光扫描方法,InSAR方法。变形监测的成果主要利用文字、照片、表格和图形等形式进行直观表达。它科学上的意义包括更好地理解变形的机理,验证有关工程的理论,以及建立正确的预报变形的理论和方法。
1工程概述
重庆市五童路小石坝高架桥桥梁总长502.81m,为三跨一联或四跨一联钢筋混凝土预应力连续箱梁;分左右两幅,单幅桥宽15米;桥梁跨径组合为第一联(30+35+35+30m)+第二联(34+38.111+34)+第三联(30+35+35+30m)+第四联(30+35.5+35.5+29m)预应力连续箱梁;设计荷载为城市-A级,人群荷载4.0kN/m2。
该桥于2003年竣工。2010年11月,五童路小石坝高架桥第二联第七跨伸缩缝严重变形,梁端出现20cm左右的水平位移,第二联第七跨梁端支座纵向和横向均出现约8cm左右的位移。为保障车辆行人安全,管理单位对道路交通实施封闭。
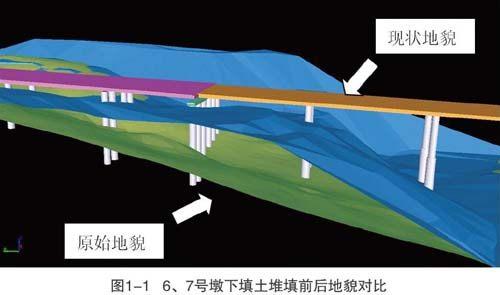
为了进一步掌握桥梁变形的状况,对小石坝高架桥进行全桥检测并对桥梁及周边地形进行1:200地形图测量。与桥梁竣工现状地形图做比较,发现小石坝高架桥桥下和周边新增大量弃土,特别是6、7号桥墩下弃土高度达8米之多。检测结果发现: 6号墩左右幅偏移都较大,达120~131mm,方向朝填土边坡下侧;7号墩左幅偏移较大,偏移量93~133mm,方向朝填土边坡下侧;7号墩右幅偏移量很小,偏移量1~19mm;左幅桥盖梁上个别支座存在承压不均现象,伸缩缝止水带有所损坏,桥头跳车现象严重。
是弃土推力的影响使桥梁发生变形还是设计和施工的缺陷使桥梁在重载之下发生形变?为了准确地分析和查找桥梁变形的原因和变形趋势,决定对小石坝高架桥桥面箱梁、桥墩、伸缩缝进行变形监测工作。在小石坝高架桥周边稳定区域布设平面基准网,使用测量机器人,采用双极坐标测量方法,对桥梁桥面进行平面位移观测、桥墩进行平面位移观测、伸缩缝变形点观测,描绘桥梁现有变化特征,为深入分析大桥现有状态及未来变化提供尽可能完备信息。
2变形观测
2.1 大桥坐标系的建立
为了更好地分析桥梁变形情况,建立大桥坐标系。沿大桥纵轴线以五里店到童家院子前进方向为X轴正方向,左边为左幅桥梁,右边为右幅桥梁;从桥梁左幅到右幅(垂直与桥梁纵轴方向)为Y轴正方向。
2.2 基准网的建立
为确保基准网的稳定性及便于长期观测需要,本次变形监测前小石坝高架桥周边稳定区域布设三等GPS平面基准点5点,平面工作基点1点。平面基准网采用8台Trimble5800 GPS接收机进行观测,观测方法及数据处理精度满足《卫星定位城市测量技术规范》(CJJ/T 73-2010)要求。
控制点均浇筑强制归心观测墩标,墩标为钢筋混凝土四棱台,其上截面尺寸为20 cm×20cm,下截面尺寸为30 cm×30cm,高为1.2m 。位于地面上的墩标,先掘出一个长宽为60cm×60cm的大坑,底部掘至基岩下50cm,然后将基座钢筋笼放在坑中,用水泥沙浆和碎石浇筑而成。
2.3 变形点的布设
在小石坝高架桥桥面箱梁埋设平面位移点16点,分别位于大桥二、三联桥面东西两侧,共8对;在小石坝高架桥桥墩埋设平面位移点12点,分别位于高架桥二、三联桥面下桥墩上。
为了了解桥梁伸缩缝的变形情况,在小石坝高架桥第一联与第二联、第二联与第三联、第三联与第四联的伸缩缝两侧布设伸缩缝变形点,共埋设变形点44点,点位采用带“十”字丝的不锈钢“I”形标志。
2.4 变形点的观测
变形观测采用TCA2003全站仪(智能机器人),按变形观测二级精度要求进行观测。
变形观测分为2个阶段实施:监测第一阶段在桥梁静载的情况下,每天上、下午两次对桥梁平面变形点进行观测,观测周期为1周,了解桥梁有无继续变形态势。监测第二阶段是在对桥梁周边弃土进行卸载时监测,观测周期为2周,频率为每天2次。主要是分析桥梁变形原因和桥梁整固阶段安全防范。
3变形监测成果分析
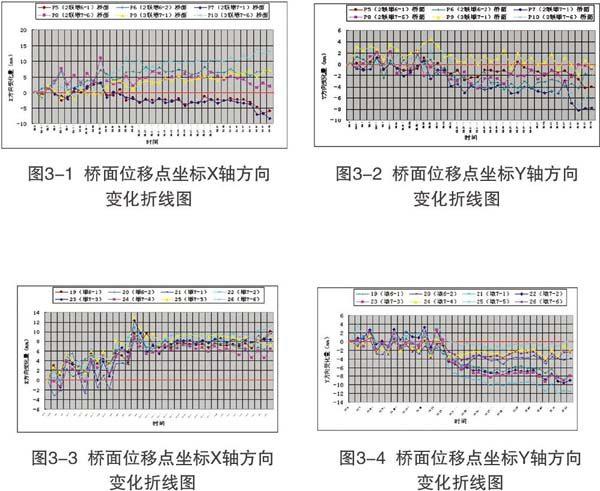
桥面变形点观测成果如图3-1和图3-2所示。
从变形观测图3-1和3-2可以看出,在桥梁静载状态下(第一监测阶段内),桥墩对应桥面位移点在坐标X方向(纵向)和Y方向(横向)各点变化趋势不明显,总体变化区间在-4.0~+8.0mm之间;在坐标Y方向(横向)第二监测阶段(卸土阶段)有由右幅向左幅位移变化的趋势,卸土完成后相对平稳趋势不明显。
桥墩变形点观测成果如图3-3和图3-4所示。
从图3-3和图3-4可以看出,在桥梁静载状态下(第一监测阶段内)桥墩无明显变化,第二监测阶段(卸土阶段)桥墩有向X位移的趋势;在坐标Y方向(横向)上有明显向左幅位移的趋势,其中墩柱7-1位移在纵横向上的变化均相对较明显。
伸缩缝变形点观测成果反映如下特征:
在第一监测阶段内(桥梁静载状态下)箱梁第二联与第三联间伸缩缝变形点观测值在纵向与斜向总体表现为增大后在一定范围内振荡,最大观测值接近14.0mm。在第二监测阶段(卸土阶段)伸缩缝距离有持续增大趋势。
4结论
1)通过小石坝高架桥第一 监测阶段所进行的的桥面平面位移观测、桥墩平面位移观测、伸缩缝变形点观测的数据结果可分析得出:本次观测期间内,小石坝高架桥桥墩、桥面平面位移较小,且变化无规律;第二联和三联间伸缩缝间距无明显异常变化。
2)通过对小石坝高架桥7号墩左幅附近卸土前后的变形观测成果分析,卸荷之后桥墩都有不同程度的向X方向和-Y方向的位移,其中7墩左幅回弹量最大;第二联第三联梁体也有向X方向和-Y方向的位移,第二联和三联间伸缩缝在弃土卸荷之后宽度增大。
本次变形监测的结果表明:在桥梁静载情况下小石坝高架桥无进一步变形趋势;在卸土过程中,桥梁有较小的回弹趋势,桥梁整体变形位移方向与桥下填土主推力方向基本一致,初步证实了填土推力是造成小石坝高架桥发生变形的主要原因。
