基于地形可视性分析的机载气象雷达地杂波剔除方法
2012-04-29吴仁彪苏志刚卢晓光
秦 娟 吴仁彪 苏志刚 卢晓光①
①(天津大学电子信息工程学院 天津 300072)
②(中国民航大学天津市智能信号与图像处理重点实验室 天津 300300)
③(天津理工大学电子信息工程学院 天津 300384)
1 引言
机载脉冲多普勒气象雷达能够有效地探测飞机前方存在的暴雨、湍流等气象危害[1,2],它的应用极大地提高了气象预报的实时性和准确性,已成为民航飞机必需的重要电子设备。但是由于其安置于飞机上,处于前视和下视工作状态,面临着比地基气象雷达更严重的地(海)面杂波[3],杂波分布范围广、强度大,情况复杂,给检测气象目标和分析气象条件等带来很大困难,严重危害飞机的飞行安全。研究地杂波抑制技术,对于改善机载气象雷达系统性能,降低地杂波干扰和提高其系统检测目标的能力都具有十分重要的意义。
当载机处于巡航阶段时,气象雷达通常工作于气象模式[1,2],为了探测较远的距离,通常设置较低的脉冲重复频率和较宽的脉冲,距离单元较大。由于地杂波和气象目标都是分布式的,而且载机运动引起的主瓣杂波频移和杂波多普勒展宽造成回波频谱混叠在一起[3-7]。因此,无法在频域将其分离,使得常规的频域杂波滤波方法失效。但此时地杂波和气象目标回波位于不同的距离上,可以利用天线的俯仰信息进行地杂波抑制[8],通过控制天线俯角以减少地面的回波信号[9-12],但是这种方法增加了飞行员的工作负担,误识率高;也可以通过计算得到地杂波所处的距离单元并剔除[13,14],从而在时域抑制地杂波。文献[13]提出的基于地形数据库的地杂波抑制方法,需要进行3维坐标转换,包括波束体(面)坐标和地形库中的坐标比较对准,进行3维映射计算才能标记地杂波的位置,计算复杂,工作量大。文献[14]提出利用多扫描技术,将相近扫描俯角的回波功率进行空时比较,对准处理后标记地杂波位置,但是基准功率会引入误差,严重影响对准。剔除地杂波的关键就是地杂波所在距离的计算。基于这种思想,提出了在数字高程模型(Digital Elevation Model, DEM)上利用地形可视性判断算法计算地杂波距离单元的方法,在时域直接剔除回波中存在的地杂波。
本文首先介绍机载雷达照射地面的情形,并分析地面点相对于载机的下视角的分布规律和利用视角信息特点判断存在杂波的距离的可行性;然后在此基础上提出利用视角信息和地形高程数据的地杂波剔除方法并给出具体实施过程;最后给出机载气象雷达的实测数据的地杂波剔除结果,分析所提方法的性能。
2 基于DEM的下视角分析
机载气象雷达在扫描工作中,波束沿指向传播散开(如图 1中深色区域所示),其在地面的照射范围返回的回波就是地杂波,体现在回波数据的距离维。如果能够分析计算地杂波所在的距离单元,就可以将杂波在时域直接去除。

图1 雷达波束方向的剖面图
如图1所示,雷达波束方向的剖面图,地面可能为平坦区域也可能为起伏的山区等,采用 DEM表示。DEM给出了地面某位置(某个经纬度)的高程数据,可以准确反映地形特征[15-17]。定义载机到地面点的连线与雷达水平线的夹角为下视角。在地球球体面均匀采样,平坦地区地面由近到远各点对应的下视角[18](图1中实线表示的载机和地面的连线与水平线的夹角)越来越小,山区的迎面坡也有同样的趋势,即下视角单调递减;但当到了山区背面坡时,下视角(图 1中虚线和水平线的夹角)将大于迎面坡的下视角角度,不具有单调递减性。根据视线的可视判决[15],由图1还可以看出,平坦地区和迎面坡相对于载机可见,背面坡受到遮挡,对于载机不可见。因此,根据下视角的特点可分析计算飞机可视域,进而计算雷达波束触地的区域和该区域到飞机的距离,就是存在地杂波的距离单元。从前面的分析可以看出该距离取决于雷达波束俯角、地形的位置和高度信息等。雷达的参数可由机载电子设备获取,地形高度可以从 DEM 数据中提取。下面结合DEM数据,利用地形可视性分析方法来计算地杂波存在的单元并予以剔除。
3 基于下视角分析的地杂波剔除
DEM是地面地理位置及其高程的数据集,提取高度时必须先确定该点的经纬度信息。根据可视性的判断方法计算雷达可视域时,需要计算分析地面点与飞机的LOS(Line Of Sight)下视角,因此需要计算波束指向上地面点的地理位置(经纬度信息)和高度。由计算得到的经纬度,提取 DEM 中对应位置的地形高度,结合雷达的扫描剖面根据可视域的分析判断地杂波存在的距离单元,即计算杂波带。杂波带获得后,地杂波的剔除就简单了。下面分别对这两个过程进行分析。
3.1 地面点经纬度计算
为了确定波束路径上散射点的大地位置坐标,建立如图2所示的本地直角坐标系。飞机到地面的投影点为坐标原点,东向为X轴,北向为Y轴。M'是飞机M到地面的投影,M'M为Z轴,雷达沿MP1发射波束MP,其在地面的投影M'P。飞机的航向角ζ、天线的方位角θ投影到地面,可得到波束和东向的夹角γ。
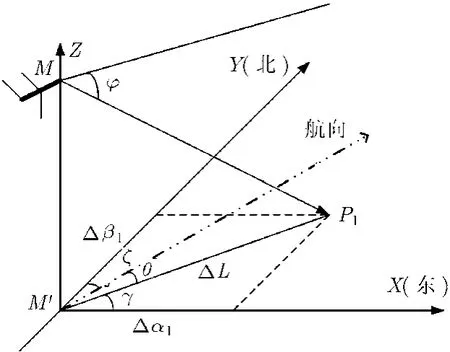
图2 本地直角坐标系
选用球体的地球模型计算M'P经过的地面点的经纬度时,不能直接利用三角形关系。将M'P分成若干小段(如图 3所示)计算,可忽略地球曲面的影响认为地面是水平的,在三角形中逐点计算经纬度。不管采用不规则三角形网格还是规则正方形网格的DEM[16,17],在原地形网格中分析可视性,数据点太稀会降低可视距离精度;数据点过密,又会增大数据量、处理的工作量和不必要的存储量。按照机载气象雷达的应用要求,选取距离分辨率到地面的投影为地面点的取样间隔,计算M'P上各点的经纬度。
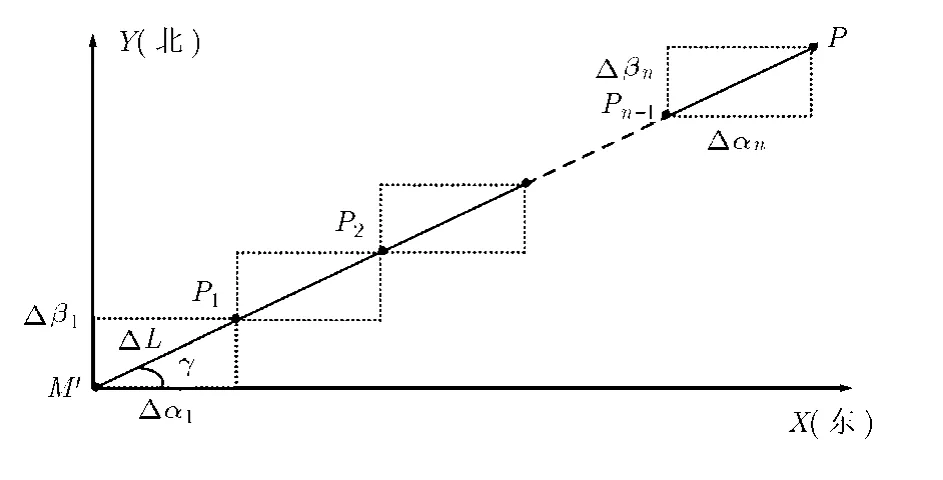
图3 波束到地面投影后采样分段
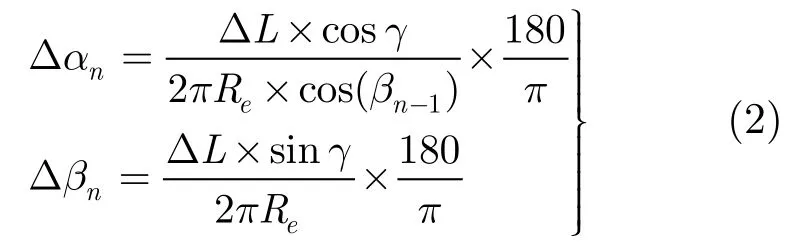
从M'点经过ΔL到达P1点,经度变化量为Δα1,纬度变化量为Δβ1。另外,由于对流层的存在使电磁波弯曲,采用地球的等效半径来抵消对流层对电磁波的弯曲效应,用Re表示。根据图2的几何关系可得,计算经度变化量Δα1和纬度变化量Δβ1的公式为

经过ΔL到达P1点后地面纬度由βM变化为β1后,纬线圈的半径发生变化,即Re× c os(β1),计算Δα2和Δβ2时式(1)不再适用。计算第2点以及第n点的经纬度变化量的公式为
3.2 杂波带计算
计算得到的各点地理位置坐标(α,β),就可以从GE(Google Earth)提取各点 DEM 高度数据,GE数据是卫星影像与航拍的数据整合,其全球地貌影像的有效分辨率至少为100 m,高程精度完全可满足应用要求。提取DEM数据后,即可根据图4计算地面点到飞机的下视角。飞机高度为ha,地面第n点Pn的地形高度为hpn,Pn点相对于飞机M的经度和纬度变化量为(Δα,Δβ),那么其两点在地心的夹角η为
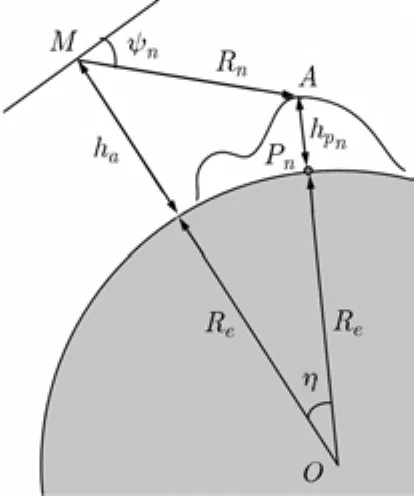
图4 计算下视角的几何关系

在ΔOAM中计算Pn点对应的斜距Rn为

之后,计算各点的下视角ψn为

可以得到下视角向量Ψ= [ψ1,ψ2, …,ψn]。对下视角进行搜索,将不符合单减特点的也就是山区背面对应的下视角去除,形成新的单调递减下视角向量,这些地面点对飞机也都是可见的。仅仅这样还不能计算雷达波束的触地位置和距离,在下视角向量中进一步搜索,属于雷达波束俯角主波束为雷达天线的 3 dB 波束宽度)内,就是波束触地的位置,其距离由式(4)计算,就是杂波在距离维的位置。上面计算中只是针对某一个方位角进行的,对其他方位的计算方法一样,即可计算得到一次完整扫描的杂波带情况。
判断出回波中杂波带出现的位置后,地杂波抑制就变得容易了。在雷达屏幕显示时将杂波带对应距离范围内的回波剪辑掉,以背景替代,屏幕上显示的即为地杂波抑制后的画面。
4 实验结果与分析
4.1 仿真结果
根据文献[19]的雷达回波仿真方法,在DEM数据上仿真机载气象雷达的地杂波,由实测数据的参数来设置仿真参数。飞机高度3084 m,扫描开始时飞机位于(E 109.7438°, N 34.7212°),航向北偏东约18°,雷达波束俯角向下6.5°,扫描的方位为[-64.4°,50°],地杂波仿真结果如图 5 所示。之后,利用本文提出的地杂波剔除方法进行杂波抑制,其结果如图 6 所示,可以看出地杂波完全被剪辑剔除,而且不影响其他位置的回波信号。验证了该方法的有效性。
4.2 实测数据处理结果与分析
利用某型号机载气象雷达实测的数据进行分析处理,验证了提出方法的有效性,并分析其性能。如图7所示,为某次完整扫描采集的雷达回波信号,实测数据通过最小可检测电平门限,门限以下的数据用背景填充。由于是晴空时进行的数据采集,数据中只有地杂波。图7可以清楚地看出地杂波带的存在,位于大约18-28 km的距离范围。

图5 仿真的地杂波回波幅度

图6 仿真数据的剪辑剔除结果

图7 俯角6.5°的实测数据回波信号幅度
根据 DEM 剔除地杂波的数据处理结果如图 8所示,准确判断杂波的位置,将杂波用背景代替后的雷达信号显示。可以看出,绝大部分的地杂波单元已经被剔除,但是有少量残留,表明该方法是能够准确地判断杂波带的存在范围并在时域剔除的。图9是采用常规方法AMTI处理的结果,方位角0°左右抑制效果较好,但是扫描方位角增大后,抑制效果很差。这是因为机载雷达地杂波谱随着方位角的增大有一定的展宽,即: Δfd= 0 .3 × (2va/λ)sinθ⋅cosϕ×ϕ3dB(va,λ分别为载机速度和雷达波长),而AMTI的频域滤波的凹口并没有随之加宽,导致其滤波能力大大下降。
从图8还可以看出,残余杂波主要位于较近距离处,这是因为我们只考虑了3 dB主瓣宽度。实际上主瓣并不是在半功率处陡然下降,而是缓慢下降,仍然能接收到近距离上的地杂波。将波束视角的范围的小角边界减小,即加宽波束的视角范围,再对原始数据进行处理,其结果如图10所示,残余杂波大大减少,杂波去除效果好。
5 结论
机载气象雷达工作于气象模式时,其回波中地杂波和气象目标在距离是可分离的,即分别位于不同的距离单元。本文根据这一特性,利用可视性判断算法,提出了基于地形可视性分析的时域地杂波抑制方法。该算法根据飞机位置和雷达参数,可以计算得到杂波所在距离单元,计算简单,易于实现,并可以在时域将杂波剔除,克服了频域滤波器凹口不随方位角展宽的缺点。仿真和实测数据处理的结果也表明该方法可有效剔除地杂波,与传统方法AMTI相比,大大改善了地杂波抑制效果。

图8 根据雷达主瓣波束宽度处理结果

图9 利用 AMTI处理结果

图10 将雷达波束视角加宽后处理结果
[1]Rockwell Collins Inc. Collins WXR-2100 MultiScanTM Radar Fully Automatic Weather Radar[Z]. Cedar Rapids, Iowa:Rockwell Collins Inc., 2007: 12-28.
[2]Honeywell Aerospace. RDR-4000 3-D Weather Radar Overview[EB/OL]. [2008-8]. http://www.honeywell.com.
[3]Zhang Chun-cheng, Ge Jian-jun, Luo Jian,et al.. Analysis of ground clutter characteristics of airborne forward looking pulse Doppler radar in high PRF[C]. Proceedings of 2006 CIE International Conference on Radar, Shanghai, China,Oct.16-19, 2006: 1-3.
[4]Yoshikawa Eiichi, Mega Tomoaki, Morimoto Takeshi,et al..Real-time spectral moments estimation and ground clutter suppression for precipitation radar with high resolution[J].IEICE Transactions on Communications, 2009, E92-B(2):578-584.
[5]Matyas C J. Use of ground-based radar for climate-scale studies of weather and rainfall[J].Geography Compass, 2010,4(9): 1218-1237.
[6]Zhou Yun and Wang Xue-gang. Rapid reconstruct method of multi-PRF airborne pulse Doppler radar clutter power spectrum[J].Journal of University of Electronic Science andTechnology of China, 2011, 40(2): 180-184.
[7]龚清勇, 朱兆达. 非正侧视阵机载雷达杂波抑制算法研究[J].电子与信息学报, 2009, 31(4): 976-980.Gong Qing-yong and Zhu Zhao-da. Study on clutter suppression algorithm for airborne radar with non-sidelooking arrays [J].Journal of Electronics&Information Technology, 2009, 31(4): 976-980.
[8]孟祥东, 王彤, 吴建新, 等. 机载相控阵雷达近程杂波抑制的俯仰向空域自适应算法[J]. 电子与信息学报, 2010, 32(4):944-952.Meng Xiang-dong, Wang Tong, Wu Jian-xin,et al.. Elevation adaptive algorithm for short-range clutter suppression in airborne phased array radar[J].Journal of Electronics&Information Technology, 2010, 32(4): 944-952.
[9]Krofeld K M and Chackalackal M S. Method of generating three-dimensional weather information from airborne weather radar imagery[P]. USA, Patent: 7427943, 2008.9.
[10]Woodell D L, Koenigs G J, and Dickerson C J. Antenna adjustment system and method for an aircraft weather radar system[P]. USA, Patent: 7307583, 2007.12.
[11]Sweet S R. Automatic weather radar system and method[P].USA, Patent: 7205928, 2007.4.
[12]Woodell D L, Jinkins R D, Meyer N A,et al.. Terrain avoidance system and method using weather radar for terrain database generation[P]. USA, Patent: 7859448, 2010.12.
[13]Szeto R Y and Cornell B G. Terrain database based ground return suppression[P].USA, Patent: 6690371, 2004.2.
[14]Woodell D L. Method and system for suppressing ground clutter returns on an airborne weather radar[P]. USA, Patent:6603425, 2003.8.
[15]Andrade M V A, Magalhães S V G, Magalhães M A,et al..Efficient viewshed computation on terrain in external memory[J].GeoInformatica, 2011, 15(2): 381-397.
[16]郭交, 李真芳, 刘艳阳, 等. 基于粗数字高程模型信息的干涉相位图生成方法[J]. 电子与信息学报, 2010, 32(11):2642-2647.Guo Jiao, Li Zhen-fang, Liu Yan-yang,et al.. Approaches to interferogram generation based on coarse DEM[J].Journal of Electronics&Information Technology, 2010, 32(11):2642-2647.
[17]Li Z, Zhu Q, and Gold C. Digital Terrain Modeling:Principles and Methodology[M]. Boca Raton: US, CRC Press,2005: 247-266.
[18]Guise B and Proctor M D. Expectations for presentation of engineering and scientific mobile platform information within a virtual globe geographic information systems[J].Journal of Geographic Information System, 2011, 3(2): 120-127.
[19]Cheong B L and Palmer R D. A time series weather radar simulator based on high-resolution atmospheric models[J].Journal of Atmospheric and Oceanic Technology, 2008, 25(2):230-243.