高性能异步电机DTC定子磁链观测技术的研究
2012-04-27樊生文罗建鑫张虎
樊生文,罗建鑫,张虎
(1.北京市变频技术工程技术研究中心,北京 100144;2.北方工业大学 机电工程学院,北京 100144)
高性能异步电机DTC定子磁链观测技术的研究
樊生文1,2,罗建鑫1,2,张虎1,2
(1.北京市变频技术工程技术研究中心,北京 100144;2.北方工业大学 机电工程学院,北京 100144)
分析研究了常见的几种用于直接转矩控制(DTC)的定子磁链估计方法,对他们的性能做了比较,最终,优化设计了一种基于电压电流(u-i)模型自适应补偿的定子磁链估计方法。通过仿真分析,验证了模型的可行性并优化配置了参数。在此基础上,实际应用于基于TMS320F2812DSP的异步电机直接转矩控制系统实验平台,取得了良好的控制效果。
直接转矩控制;定子磁链估计;电压电流模型;自适应补偿;异步电机
1 引言
直接转矩控制(DTC)中,需要计算定子磁链,构成磁链自控制;同时,电磁转矩的准确观测也需要定子磁链;所以,定子磁链的准确获得是实现高性能直接转矩控制的关键[1]。常用的定子磁链观测方法有:1)电压电流模型(u-i)及其改进模型;2)电流速度 模 型 (i-n);3)电 压 速 度 模 型(u-n);4)一些基于现代控制理论的全阶或者降价观测器模型。u-i模型算法简单,易于实现,但其对积分初值、电压测量的直流偏移和定子电阻的变化非常敏感,尤其在低速时是无法运行的;一些改进的模型解决了其直流偏移问题,但同时也引入了幅值和相位误差。i-n模型利用定子电流和转子转速来确定定子磁链,一般用来做低速时的磁链观测模型,但i-n模型易受转子电阻、漏电感、主磁通电感变化的影响,另外i-n模型要求精确的转速。u-n模型是u-i模型和i-n模型的结合,低速时使用i-n模型,高速时使用u-n模型,其仍然无法克服i-n模型固有的缺陷。一些基于现代控制理论观测器模型比较复杂,运算量大,实际中难以应用。
基于以上分析,本文优化设计了一种基于u-i模型自适应补偿的磁链观测器,通过给u-i模型加补偿,使磁链观测模型在低速时主要运行在不依赖定子电压和定子电阻的电流模型上,高速时主要运行在u-i模型上,且无需测量转速,适合在无速度直接转矩控制中应用。本文通过Matlab/Simulink对本模型进行了仿真验证,并最终应用在TMS320F2812DSP异步电机变频调速系统平台上得到了良好的调速性能。
2 各种磁链模型比较
2.1 u-i模型及其几种改进方法
异步电机在二相静止坐标系下由定子电压方程可得定子磁链的u-i模型为



由式(3)可见积分初值和微小直流偏移量对纯积分器的影响非常大,而实际中这又是无法避免的,所以纯积分器没有实际应用价值[1]。
为了消除积分器的不良影响,可以加高通滤波器来抑制直流分量,实际上相当于用一阶惯性环节代替纯积分环节,但这样也引入了幅值相位误差。
图1为输入sin(20πt),分别经过纯积分器、截止频率ωc=1rad/s和ωc=20rad/s低通滤波

图1 一阶惯性环节对积分初值抑制效果Fig.1 First-order inertia effects on restraining initial integral value
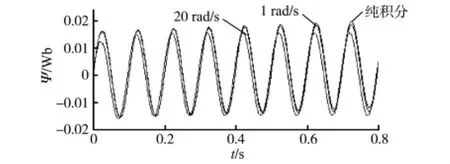
图2 一阶惯性环节对直流偏置抑制效果Fig.2 First-order inertia effects on restraining DC bias
由图1、图2可见,一阶滤波环节可以解决积分初值和直流偏置问题,其中截止频率越大,抑制效果越好,但带来的幅值和相位误差也越大。
单纯把积分器变为一阶滤波器并不能从根本上解决积分器的缺陷,尤其在低速时,定子磁链的误差更大,所以必须对幅值和相位加补偿,一些学者提出了一些具有校正环节的改进型积分器,其基本公式如下:



图3 饱和反馈改进积分器滤波效果Fig.3 Saturation feedback improved integrator filter effect
由图3可见饱和反馈改进积分器可以很好地抑制直流偏移。
图4为具有积分饱和反馈的改进型积分器,这种积分器可以抑制积分饱和,但由于是分别限幅,可能使输出波形畸变。为了避免这种可能,图5的限幅积分器[2-3]先进行了坐标变换,然后对整体幅值限幅,这种模型可以抑制直流偏移,也避免了波形畸变,具有一定的应用价值,但他依赖于限幅值,而且,滤波器截止频率的选取限制了调速的范围,所以当转速突变时,截止频率不会变化,因而会发生磁链失真。
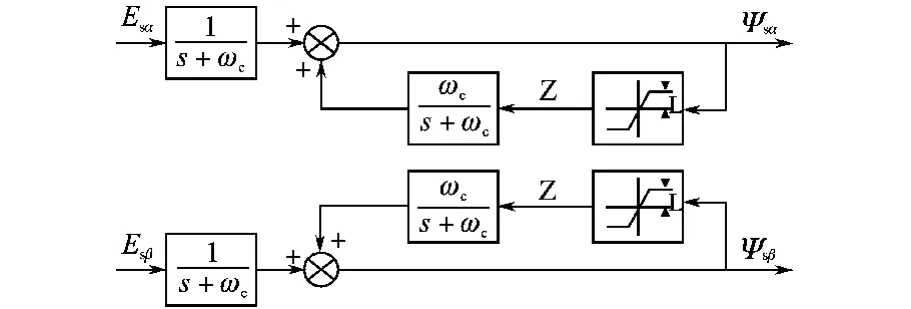
图4 饱和反馈的改进型积分器框图Fig.4 Saturation feedback improved integrator diagram

图5 限幅改进型积分器框图Fig.5 Amplitude limiting improved integrator diagram
2.2 i-n 模型
由转子电压方程和磁链方程可得定子磁链的i-n模型为

式中:Rr,Ls,Lr,Lm分别为转子电阻、定子电感、转子电感和互感;ωr为转子电角速度。
由模型公式可见:i-n模型依赖的电机参数比较多,而且要求精确的转速测量。
2.3 u-n 模型
将u-i模型和i-n模型结合起来,低速时使用i-n模型,高速时使用u-i模型,为了解决二者的平滑切换可以将i-n模型结果通过低通滤波器,u-i模型通过高通滤波器,然后将二者结果相加作为最终定子磁链观测值:

u-n模型虽然可以获得全速度范围的定子磁链,但由于其本身是两种模型的组合,所以无法克服i-n模型固有的缺陷,比如对电机参数依赖比较强,也需要精确的电机转速,而且,两种模型的平滑切换也存在困难[4]。
3 基于u-i模型自适应补偿方法
为了获得全速度范围内高性能的磁链模型,本文采用给电压模型加补偿的方法,补偿值由电压模型和电流模型的差值通过1个PI调节器来给定,通过调节参数值,可以使低速时磁链主要通过电流模型来计算,而高速时切换到了电压模型,这样就获得了全速度范围内高性能的磁链观测器,见图6。
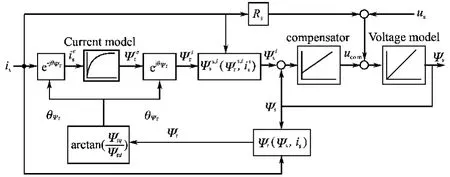
图6 定子磁链估计模型Fig.6 Stator flux estimator
依据异步电机在转子磁链定向旋转坐标系下的电压方程和磁链方程,可得转子磁链旋转坐标系下的转子磁链为
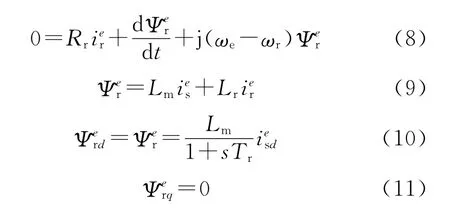

式中:上标i代表电流模型下的值。
旋转变换所用转子磁链角可由静止坐标系下的转子磁链计算,转子磁链计算见下式:

由于电流模型不依赖定子电压和定子电阻,所以在低速时可以获得精确的定子磁链。
u-i模型上节已经讨论过,此处给电压加一个补偿,如下式:

补偿电压由u-i模型磁链和电流模型磁链的差值经过一个PI环来给出,见下式:

其中KP,KI的选取依据是确保低频时电流模型作用,高频时电压模型起主要作用,见下式:
【国际原子能机构网站2018年9月14日报道】 2018年9月,国际原子能机构(IAEA)发布《2018年气候变化与核电》报告,并在报告中表示,核电可以在为全球经济发展提供所需电力的同时,为实现气候变化目标做出重要贡献。该报告是2016年版报告的更新版,在其中加入了有关能源生产与气候变化之间联系的最新科学信息和分析结果。原子能机构希望这份报告能为参与《联合国气候变化框架公约》等论坛活动的决策者提供有用信息。

式中:ω1,ω2分别为低频和高频时的截止频率[5];Ψis为电流模型下的定子磁链值;Ψs为最终定子磁链值。
由于电流模型中转子磁链角的计算依然是通过电压模型定子磁链得来的,本质上依然是一种开环控制,所以其应用在极低速情况下,抗扰性能不是很理想。
4 仿真结果
为了验证模型性能,在 Matlab/Simulink仿真环境下建立异步电动机直接转矩控制系统,在电机的给定转速突变、负载突变、定子电压加直流偏置和定子电阻变化情况下对该方案进行验证,系统参数为:2.2kW三相两对极异步电机,Rs=2.566Ω,Rr=2.17Ω,Ls=0.26H,Lr=0.26H,Lm=0.253H;定子磁链给定1.5Wb,负载转矩给定值0~0.5s空载,0.5s时突加负载10N·m;转速给定为0~1.5s内800r/min,1.5s时转速突降到100r/min。为了进一步验证模型的性能,人为给定子电压加了1V的直流偏置,并考虑到定子电阻的偏差,人为将定子电阻设为2.4Ω(实际为2.566Ω)。仿真波形如图7~图10所示。
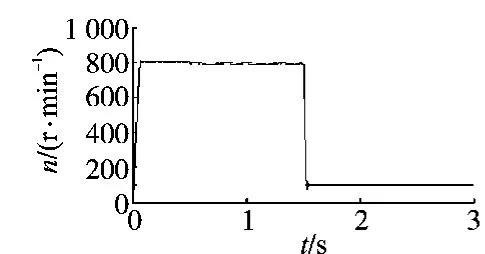
图7 转速波形图Fig.7 Speed waveform
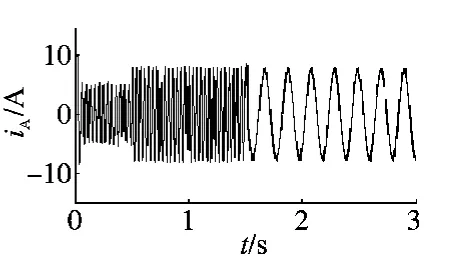
图8 定子电流波形图Fig.8 Stator current waveform

图9 转矩波形图Fig.9 Torque waveform
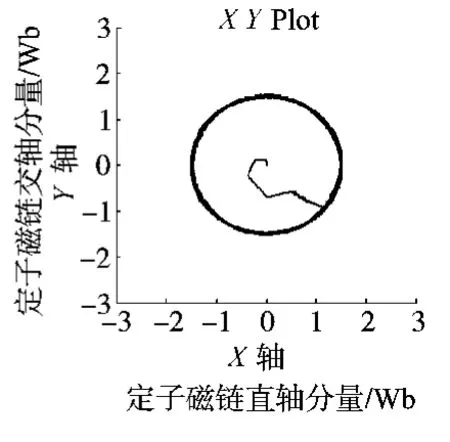
图10 仿真定子磁链圆Fig.10 Simulation stator flux circle
由图7~图10的波形可见,本文采用的方法可以准确地观察定子磁链值,并且对定子电压直流偏置和定子电阻变化不敏感,在高速和低速范围内电机运行性能良好,转速变化和转矩变化时,系统响应很快,转矩脉动也比较小。
5 DSP2812实验平台验证
最后,本文采用TMS320F2812DSP设计了异步电机直接转矩控制系统实验平台,在此实验平台上对上述磁链观测方法进行了验证,实验硬件框图如图11所示,软件框图如图12所示,功率器件选用了PM75CLA120,其耐压值800V,开关频率可达20kHz,电机选用4kW三相两极鼠笼式异步电机,实验波形如图13~图17所示,其中图13为6Hz空载正反转时的定子磁链交、直轴分量,定子磁链角和定子电流;图14为60Hz空载正反转时的定子磁链交、直轴分量,定子磁链角和定子电流;图15为6Hz空载启动时的定子磁链交、直轴分量,定子磁链角和定子电流;图16为用6Hz空载启动时定子磁链交、直轴值在Matlab上作的磁链圆。
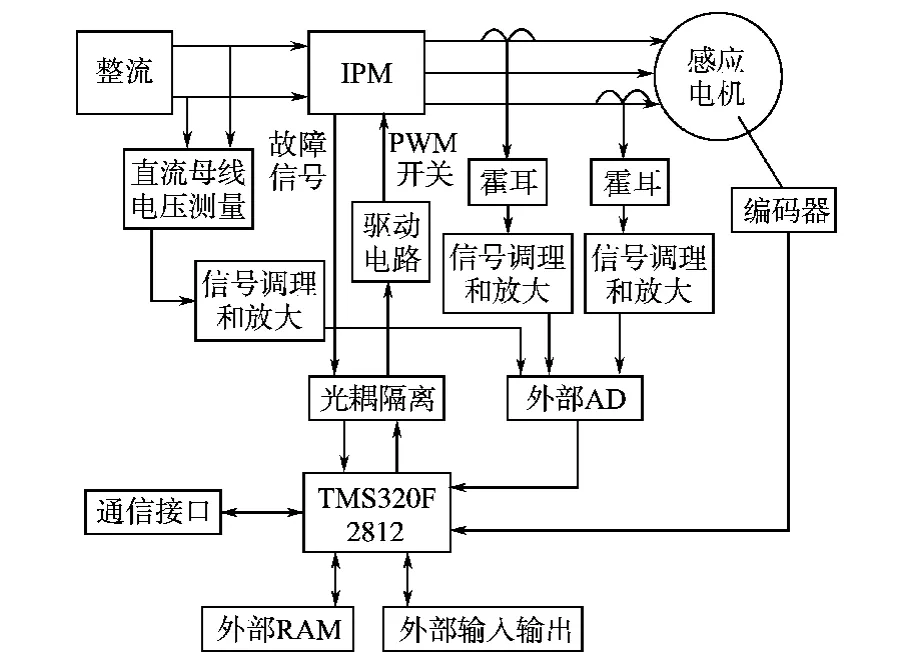
图11 硬件结构图Fig.11 Hardware structure diagram
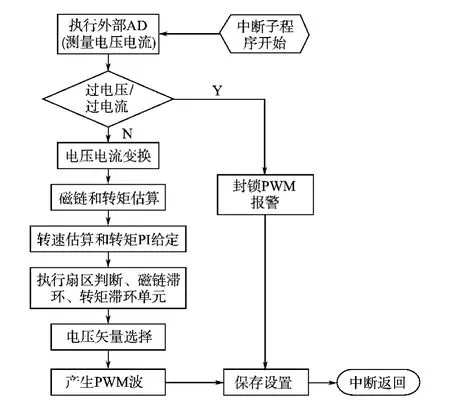
图12 软件流程图Fig.12 Software flow chart
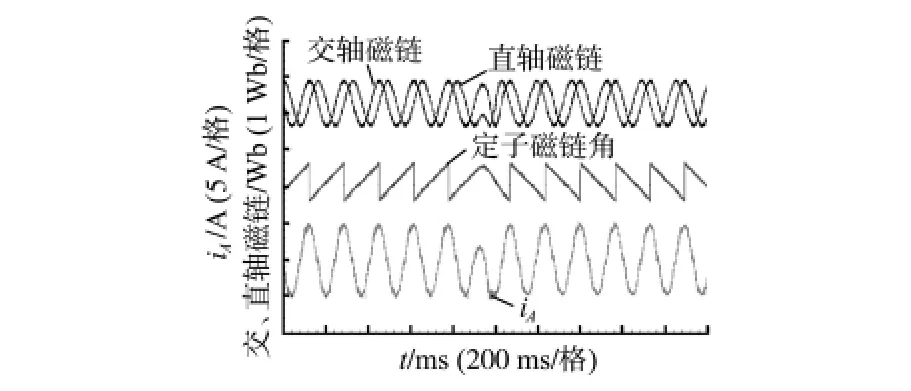
图13 6Hz空载正反转定子磁链和电流波形Fig.13 6Hz unload stator flux and phase current waveforms when forward and reverse
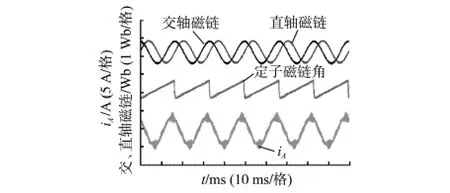
图14 60Hz空载时定子磁链和电流波形Fig.14 60Hz unload stator flux and phase current waveforms
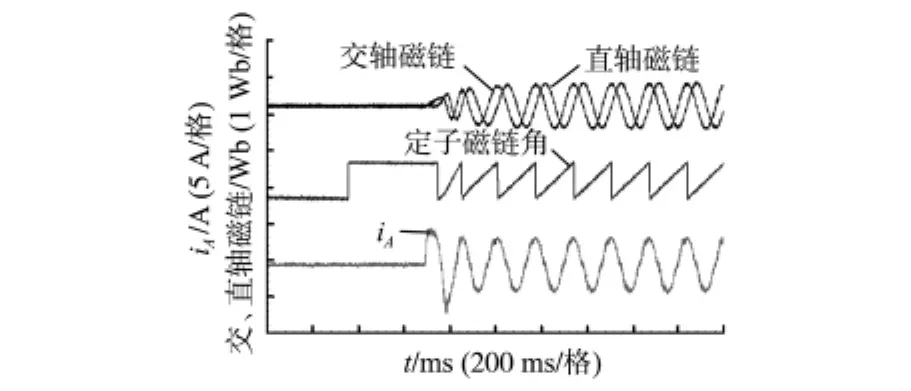
图15 6Hz空载启动时的定子磁链和电流波形Fig.15 Stator flux and current waveforms of 6Hz unload start-up

图16 定子磁链圆Fig.16 Stator flux circle
通过图13~图16的波形可见,应用本文设计的基于u-i模型自适应补偿的定子磁链观测器在低速、高速以及启动时都可以获得精确的定子磁链。
图17为5Hz和50Hz时的定子电流波形和转子转速。
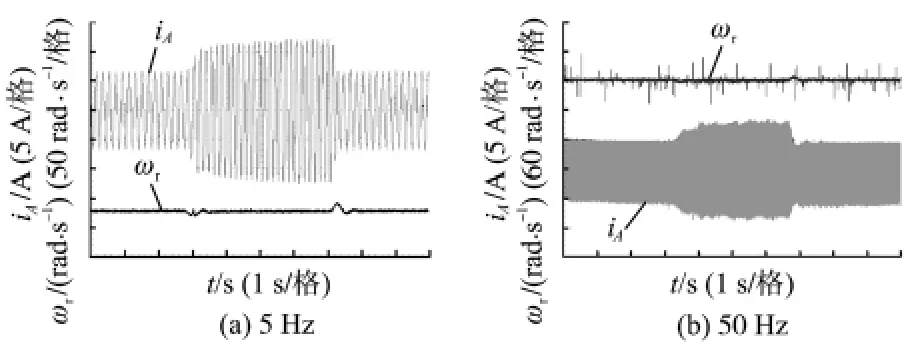
图17 5Hz和50Hz加减载电流和速度波形Fig.17 5Hz and 50Hz current and speed waveforms when load and unload
由图17可见,基于此模型的异步电机直接转矩控制方法在TMS320F2812DSP实验平台上获得了良好的调速性能,电机在低速、高速突加、突降负载时都运行良好。
6 结论
本文首先分析比较了常用的几种定子磁链观测器,然后优化设计了一种基于u-i模型自适应补偿的定子磁链观测器,并最终将其应用在基于TMS320F2812DSP异步电机直接转矩控制实验平台上。实验结果证明,此模型在高速和低速时都可以获得较为精确的定子磁链值,运用此模型观测磁链,直接转矩控制可以获得良好的调速性能。
[1] 周扬忠,胡育文.交流电动机直接转矩控制[M].北京:机械工业出版社,2009.
[2] 于泳,宋海龙,徐殿国.基于改进的形态滤波器信号预处理的感应电机定子磁链信号获取方法的研究[J].中国电机工程学报,2003,23(6):149-153.
[3] 刘军锋,徐金榜,万淑芸.基于定子磁场定向的无速度传感器矢量控制[J].华中科技大学学报:自然科学版,2005,33(6):83-85.
[4] 王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2008.
[5] Lascu C,Boldea I,Blaabjeerg F.A Modified Direct Torque Control for Induction Motor Sensorless Drive[J].IEEE Trans.Ind.Appl.,2000,36(1):122-130.
修改稿日期:2012-02-08
Research and Application of High Performance Direct Torque Control Induction Motor Stator Flux Observer
FAN Sheng-wen1,2,LUO Jian-xin1,2,ZHANG Hu1,2
(1.BeijingVariableFrequencyTechnologiesResearchCenter,Beijing100144,China;2.CollegeofMechanicalandElectricalEngineering,North ChinaUniversityofTechnology,Beijing100144,China)
Based on the analysis of several common stator flux estimation methods and the comparison of their performances for direct torque control,a way of the stator flux estimation,a voltage and current(u-i)model with self adaptive compensation was designed and optimized.Furthermore,the feasibility of the model was verified and the parameters were optimized through simulation analysis.On this base,the flux estimation model was applied on the induction motor direct torque control system experiment platform based on TMS320F2812DSP,and the high performance of this model is verified by the good control effect on the experiment.
direct torque control;stator flux estimation;voltage current model;self adpaptive compensation;induction motor
TM921
A
樊生文(1969-),男,工程硕士,高级工程师,副教授,Email:fsw@ncut.edu.cn
2011-07-11