地铁站台屏蔽门控制系统研制
2012-04-27张玉超张冀徐科军王刚黄中全
张玉超,张冀,徐科军,王刚,黄中全
(1.合肥工业大学 电气与自动化工程学院,安徽 合肥 230009;2.重庆川仪自动化股份有限公司,重庆 404001)
地铁站台屏蔽门控制系统研制
张玉超1,张冀1,徐科军1,王刚2,黄中全2
(1.合肥工业大学 电气与自动化工程学院,安徽 合肥 230009;2.重庆川仪自动化股份有限公司,重庆 404001)
针对地铁站台屏蔽门控制系统高可靠性要求,设计了一种基于MCU+CPLD+IPM架构的无刷直流电机驱动控制方案。加入电流环显著减小了母线电流的波动。样机经过模拟装置控制实验与屏蔽门控制实验,实验结果表明,系统的动态特性良好,可靠性较强,证明文中提出的方法的可行性。
站台屏蔽门;无刷直流电机;双闭环
地铁屏蔽门是一种围绕地铁站台边缘设置、局部开关可控的连续屏墙。它将站台与轨道隔离,可以防止乘客跌落轨道而发生危险,也可以防止列车进站带来强风和灰尘,为乘客提供了一个安全、舒适的乘车环境。
本文针对站台屏蔽门门控系统运行特点,设计一种MCU+CPLD+IPM结构的屏蔽门控制系统方案,研制控制系统的硬件平台,设计系统的软件,在硬件架构和软件算法方面充分考虑了控制系统运行的可靠性。样机实验结果表明,系统的各项性能指标满足设计要求,控制系统具有响应迅速、可靠性高的特点,具有很好的工程应用前景。
1 屏蔽门结构和控制系统要求
1.1 站台屏蔽门的结构
站台屏蔽门控制系统的机械结构图如图1所示。安装方式采取下支撑方式,采用无刷直流电机驱动,屏蔽门的下部装有同步带,耦合在从动轮上,电机轴上装有主动轮,与从动轮互相耦合。控制器根据门的运行方向、运行速度和无刷电机霍耳传感器反馈的位置信号进行PWM波形的调制,调制波形送入功率驱动电路,电机带动传动轮进行转动,从而实现屏蔽门的开关。

图1 屏蔽门控制系统机械结构图Fig.1 Mechanical structure of screen door control system
1.2 控制系统设计要求
根据屏蔽门实际运行的工况要求,控制系统应具有以下功能:
1)快速、平稳地执行主控制器发出的开、关门信号,在要求的时间内完成屏蔽门的运行,其中开启时间为2.5~3s,关闭时间为3~3.5s;
2)按照设定的速度曲线进行开关门动作,且运行的动能和速度满足要求,开关门的位置比较精确;
3)可靠性较高,能够长时间安全可靠工作,电路具有相应的各种保护功能,在突发情况下不会损坏器件;
4)可以采集屏蔽门的运行状态及各种故障信息并发送到主控制器,使主控制器能够集中进行管理和监控。
根据以上设计要求,屏蔽门控制系统应当具有响应快速、定位精准、运行可靠和故障自诊断等特性,因此,在硬件设计和软件算法上应有特殊的处理。
2 系统硬件设计
控制系统的硬件结构如图2所示,可以分为3个部分,即控制回路、功率回路和机组。为了满足安全、可靠、高效的设计要求,控制器选用了MCU+CPLD+IPM组合的方案。MCU选用英飞凌公司的XE164FM。XE164FM单片机以强大的电机控制功能和高可靠性著称,在控制精度和可靠性方面都得到保证。CPLD选用Altera公司的EPM570T100C5,主要起二级保护的功能,保障系统安全可靠运行。IPM选用三菱公司的PS21965,内部集成了功率桥及其驱动与保护电路,在简化电路设计的同时,极大地提高了系统的可靠性。

图2 硬件结构图Fig.2 The diagram of the hardware
2.1 主回路部分
主回路采用交-直-交电压型变频器结构。IPM集成了逆变桥,经过PWM的控制来驱动无刷直流电机。图3是逆变桥电路图,以三菱公司的PS21965为核心,由 R1,D1~D3,C1~C3组成自举电路,为逆变桥3个上桥臂提供栅源电压VGS。D7,R29,C45,C049构成了逆变桥的尖峰吸收回路,在PCB布局时要尽量靠近IPM放置。U1为霍耳型电流反馈元件,提供电流反馈,以便软件进行电流环计算。

图3 IPM及其外围电路Fig.3 IPM and its peripheral circuits
2.2 控制回路部分
控制回路部分主要由XE164FM芯片、检测电路、驱动电路和保护电路组成。通过检测母线电流来实现电流反馈;IPM的过流信号反馈给CPLD,在CPLD内部进行过流保护,在控制器过流的情况下及时关断输出;6路PWM信号经过CPLD送入IPM模块,进行PWM调制;CPLD对6路PWM信号进行检测,一旦出现上下桥臂同时导通就立即关断PWM的输出,以防止短路。XE164FM参与整个系统的控制与管理,完成速度、电流的双闭环全数字调节,通过输出三相6路PWM信号控制开关管的关断来实现无刷直流电机的调速。
此外,控制回路部分还实现CAN通信、控制器运行状态指示和声光报警等功能。
2.3 其他隔离与保护电路
整个系统的保护电路包括过压保护、欠压保护、过流保护、热保护、防浪涌保护电路等。主回路与控制回路之间的信号传输全部采用光耦进行隔离。
由于电机制动过程中,电流会回馈到主回路,导致母线电压升高,所以主回路中的过压保护电路特别重要。图4为110V欠电压过电压保护电路,电路下半部分为欠压检测部分,这里的TL431作电压比较器使用。其余部分为过压保护电路,可限制最高电压为153V,当电压大于153V 时,Q5导通,U26导通,Q3导通,CC27_OVINT信号变高电平,送到单片机;接着Q4,U25,Q7导通,单片机发出的PWM 驱动信号CC19_brake使Q7开始斩波降压,直到母线电压降低。C35与Q3的输出电阻构成一个RC延时电路,防止斩波器工作在临界状态,即:母线电流经过Q7泄放,CC27_OVINT又变低,Q7便关断,如此反复。

图4 过压与欠压保护电路Fig.4 Over voltage and under voltage protection circuits
由于漏感和MOSFET较大的开通电容的影响,使得其关断时会承受一个很高的电压尖峰。为了减小这个尖峰,使用RCD缓冲电路。RCD缓冲电路可以抑制MOSFET关断损耗和漏极电压上升率。当关断时,电阻被二极管短路,二极管直接跟电容串联。C58起到吸收尖峰电压的作用,当开通时,形成放电回路,电阻R62的加入给电容提供一个能量泄放通道,同时也避免电容中所有的储能都消耗在开通时的开关管上从而造成开关过热。C58的取值需要足够大,使得开关管电压上升速度足够缓慢,保证开关管不受到冲击。而C58因为损耗的原因也不能太大,而R62的大小没有特别要求,R越小,C58的放电速度越快,但因C58需要在开关管导通时放电,因此开关管的瞬态工作电流也相应增大,一般只需要在Ton的时间内保证C58在下次开关管关断时,放完电荷就可以了。
2.4 反馈信号检测
系统的反馈信号包括电流反馈、转速反馈和屏蔽门位置检测3种。电流反馈采用安装在母线的HALL型电流传感器来完成,电路如图3中U1所示。电机转速反馈由安装在直流无刷电机内的HALL位置传感器完成。屏蔽门的位置检测也是依靠电机HALL位置传感器来检测的,经过蜗轮蜗杆机构减速之后,每个HALL脉冲对应屏蔽门位移0.1mm。
3 系统软件设计
系统的软件包括主程序、捕获中断程序和定时器单元周期匹配程序。在主程序中对MCU外设单元进行初始化并启动电机;在捕获中断里进行换相处理和电机转速计算;在定时器周期匹配中断里进行双闭环PI调节。
3.1 换相和转速计算
3路霍耳位置信号送入CPLD,边沿锁存后进行或运算后在360°的电角度内可得到相隔60°(电角度)的6个脉冲信号,将这个信号送进MCU的捕获单元,捕获单元进行上升边沿检测,检测到脉冲时说明换相时刻到来,软件进行换相处理。
捕获单元还用来计算电机转速。计算相邻2个霍耳脉冲的定时器计数值的差,再乘以定时器的时间分辨率,就得到了相邻2个脉冲的时间间隔,然后换算成转速。2路电机的转速计算都是通过同一个定时器来完成的,为了保证转速计算的准确,允许溢出,在软件中设置软件定时器对定时器的溢出次数进行增运算,在计算转速时将定时器的溢出次数考虑进去,从而计算出真实的电机转速。
3.2 双闭环PI调节
为了让电机转速和母线电流可以得到实时调节,选择在1ms时进行电流环的调节,10ms时进行速度环的调节,最后根据调节结果改变PWM的占空比。电流、转速两个闭环均采用位置型数字PI控制,PI计算公式如下:

双闭环PI调节的流程图如图5所示,为了防止PI控制器出现积分饱和而带来控制效果的恶化,速度环采用防积分饱和式PI控制器,在计算控制量时首先判断上次的控制量是否已经超出极限范围,若超出了上限则只累加负偏差,若超过了下限则只累加正偏差,这样可以避免控制量长时间停留在饱和区。
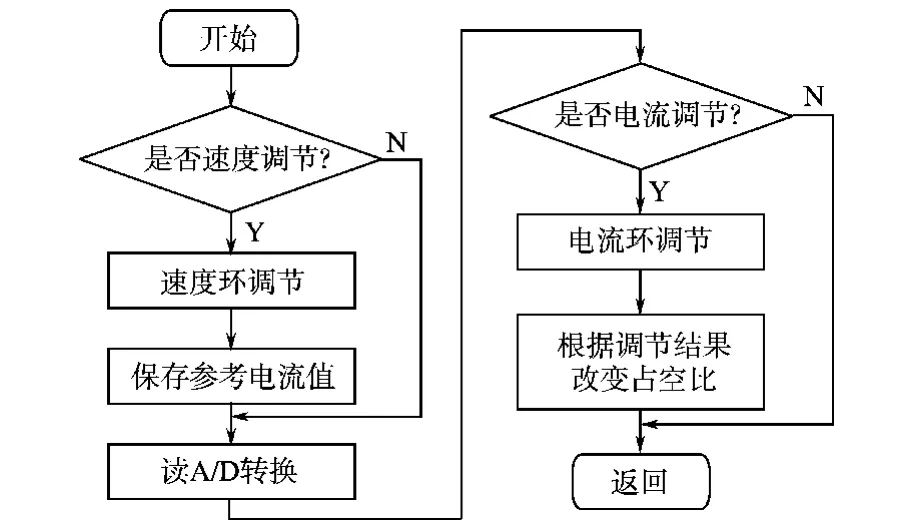
图5 双闭环调速软件流程图Fig.5 Flow chart of double closed-loop regulation
实验过程中,双闭环的PI参数整定采用工程整定法,通过观察电机响应曲线的上升时间、超调量与稳态误差等指标来调整PI参数。实验过程中采用方波激励来进行电流环整定,整定结果如图6所示,从图6中可以看到,电流响应曲线基本无超调,无静态误差,上升时间在20ms左右。转速环采用阶跃响应来进行整定,整定结果如图7所示,上升时间200ms左右,无超调,无静态误差。

图6 电流环整定结果Fig.6 Current loop adjusting result

图7 转速环波形Fig.7 Waveform of motor speed loop
4 实验验证
硬件调试完成后,我们首先在模拟飞轮装置上进行了软件调试与电机响应性能测试的实验。当各项性能满足要求后,再将控制器安装到站台屏蔽门上,在实际工况下进行测试。
4.1 模拟飞轮装置与电机
使用的直流无刷电机参数为:额定电压U=220V,额定功率P=200W,额定转速n=3 200 r/min,额定电流I=1.8A,极对数p=5,绕组电阻R=2Ω,绕组电感L=0.002 4H,转动惯量J=0.000 35kg·m2。
由于屏蔽门体积比较大,同时在门开关过程中产生的噪声也很大,不方便在实验室安装。为方便在实验室条件下进行软件的调试工作,我们设计了模拟飞轮装置,安装在电机减速齿轮的传动轴上,模拟屏蔽门转动惯量,方便我们在实验室条件下进行调试。
根据动能守恒折算门的转动惯量,安全门质量50kg,折算至电机轴时的半径r=2.45mm,其转动惯量为3.5×10-2kg·m2。采用均质钢板加工成飞轮直接装于减速后的传动轴上来模拟门的转动惯量。我们选用密度ρ=7e8+3kg/m3,直径为184mm,厚度为40mm的钢质圆盘作为飞轮。并通过在飞轮上打孔添加配重的方法来调节动平衡,具体方法为在飞轮上以65mm为边长画一个同心的正六边形,六边形每个顶角处钻通孔,孔径与所选螺栓匹配。选用螺栓直径10mm左右,长100mm左右,用螺母固定于飞轮上,通过增减螺栓上的金属垫片调整飞轮的动平衡。
4.2 控制器性能
模拟屏蔽门关闭中的减速动作,电机的参考转速在2.5s时给定为800r/min,转速的响应波形如图8所示。

图8 电机测试转速波形Fig.8 The speed waveform of motor testing
采用传统PI调节时,很容易出现减速时超调量过大,会使屏蔽门的运行不够平滑。因此,在设计中采取开环减速的方式,减速完成后再加入PI闭环调节,从图8中可以看出,采用开环减速的方式明显改善了超调现象。
为了验证电流环调节的有效性,对电机运行时的母线电流进行了观测。图9为不带电流环,仅有转速环时的母线电流波形。带电流环的双闭环调节时电机的启动电流波形如图10所示。两图比较可以看出,仅有速度环调节时母线上的电流没有得到控制,存在大的电流尖峰脉冲,因此对电路造成了较大冲击,严重影响了系统的可靠性;而采用带电流闭环的控制算法时,母线上的尖峰电流得到了很大的抑制,运行平稳,因此控制系统的可靠性得到了很大的提高。
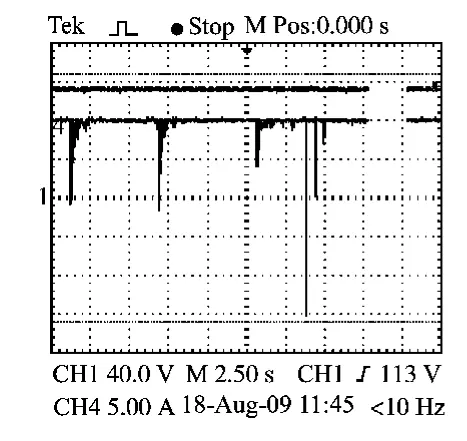
图9 无电流环的母线电流Fig.9 Bus current without current loop

图10 带电流环的母线电流Fig.10 Bus current with current loop
4.3 实验现场
将控制系统安装在屏蔽门上之后,我们对控制系统控制屏蔽门开关的过程进行了测试。
图11为屏蔽门关闭过程中转速曲线与行程曲线。
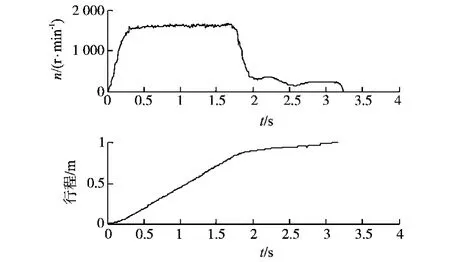
图11 屏蔽门关闭过程行程曲线与转速曲线Fig.11 The displacement curve and speed curve of screen door closing process
从图11中可以看到,屏蔽门的运行过程可以分为高速运行阶段和低速运行阶段两部分。这样做是为了在两扇门关闭的时候减小冲击。每扇门的总行程为1m。
5 结论
站台屏蔽门控制系统软硬件平台经过了实验室阶段在模拟飞轮装置上的性能测试和实际工况的实测表明系统各项性能较好,满足设计要求,具有以下特点:
1)根据站台屏蔽门运行时间长、可靠性要求高、工况恶劣等特点,设计了 MCU+CPLD+IPM的控制器方案,在IPM内部固有的保护功能基础上,增加CPLD二级保护功能,确保门控系统长期安全、可靠运行;
2)采用带电流环的双闭环控制方法,调速指标满足设计要求;
3)显著抑制了母线上的电流尖峰,减小了对硬件电路的冲击,明显提高了系统的可靠性;
4)设计了模拟飞轮装置,模拟负载的转动惯量,便于我们前期在实验室进行软硬件的设计与调试工作;
5)研制的样机安装在站台屏蔽门上,在实际工况下进行了实验验证,系统的各项性能指标满足设计要求,具有很好的工程应用前景。
[1] Miller T J E.Brushless Permanent Magnet and Reluctance Motor Drives[M].England:Oxford Science Publications,1993.
[2] 中华人民共和国建设部,CJ-T236-2006,《中华人民共和国城镇建设行业标准-城市轨道交通站台屏蔽门》[S].北京:中国标准出版社,2007.
[3] Chen Lidong,Shi Lei.Design of Control System of Solar Cell Lamination Machine Based on Double MCU[C]∥Changsha:Proceeding of the ICMTMA,2010,1:1049-1048.
[4] Liu Guohai,Zhang Hongtao.Design and Analysis on Permanent-magnet BLDC Motor for Automatic Door[C]∥Wuhan:ICEMS,2008:3171-3176.
[5] Implementation of a Speed Controlled Brushless DC Drive Using TMS320F240[EB/OL].[1997-7].Texas Instruments Inc,http://focus.ti.com/general/docs/lit/getliterature.tsp?literature-Number=bpra077&fileType=pdf.
[6] Jim Lepkowski.Motor Control Sensor Feedback Circuits[EB/OL].[2003].Microchip Technology Inc,http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1824&appnote=en012139.
修改稿日期:2012-01-19
Control System Development for Metro Platform Screen Door
ZHANG Yu-chao1,ZHANG Ji1,XU Ke-jun1,WANG Gang2,HUANG Zhong-quan2
(1.SchoolofElectricalandAutomationEngineering,HefeiUniversityofTechnology,Hefei230009,Anhui,China;2.ChongqingChuanyiAutomationCo.,Ltd.,Chongqing404001,China)
Aimed at the demand for high reliability in metro platform screen door control system,a control scheme of BLDC based on MCU,CPLD and IPM was proposed.With the current closed loop,the bus current spikes are suppressed.The model machine has been tested in simulation equipment controlling experiment and platform screen doors controlling experiment.The results of the test show that the system has excellent dynamic performances and high reliability,thus the validity and the feasibility of the proposed approach are proved.
platform screen doors;brushless DC motor(BLDCM);double closed loop
TP273
A
张玉超(1986-),男,硕士研究生,Email:zhangyuchao111@126.com
2011-06-10