基于ITRF2005基准下的速度场融合分析中国大陆板块运动趋势*
2012-04-26李万能金平伟向家平张自军李岚斌
李万能,金平伟,向家平,张自军,李岚斌
(珠江水利委员会珠江流域水土保持监测中心站,广东 广州510611)
0 引 言
中国大陆位于欧亚板块块体上,被夹持在印度板块、菲律宾板块、太平洋板块以及西伯利亚-蒙古板块之间,是亚洲东部新构造变形极其强烈的区域,特别是南部地震带以西的青藏高原和西北地区的构造活动更为强烈、复杂[1]。关于中国大陆板块体构造及其运动已有很多研究,文献[2]与文献[3]给出了中国及邻区活动板块、亚板块与块体划分和板内块体的现今运动图像。
对于中国大陆周边板块的作用已有大量的研究,但绝大部分都是定性描述,GPS技术的应用为有效解决这个问题奠定了基础[4]。我国开展GPS空间大地测量已有20多年,结合全球学者对青藏高原地区20年的研究成果,可利用数据融合得到统一ITRF2005下的GPS的速度场,通过得到的速度场结果探讨中国大陆各个块体间的相对运动趋势。
1 刚性板块运动的基本理论
如果将板块当作刚性体,则板块运动欧拉矢量w与测站地心速度V之间有

式中r是测站地心位置矢量。
因板块运动主要反映在水平站速度之中,目前VLBI、SLR、GPS三种技术确定垂直站速度还不够精确[5],直接采用地心站速度V可能会使板块运动参数估计受到垂向站速度误差的影响。实际应用中,常把测站地心速度转换为站心速度,并采用水平分量(东向速度Ve和北向速度Vn)求解板块欧拉矢量w.
由于板块运动主要沿水平方向,而ITRF2005速度场是地心直角坐标速度,通过式(2)转换为地面坐标,并将水平速度分离出来。
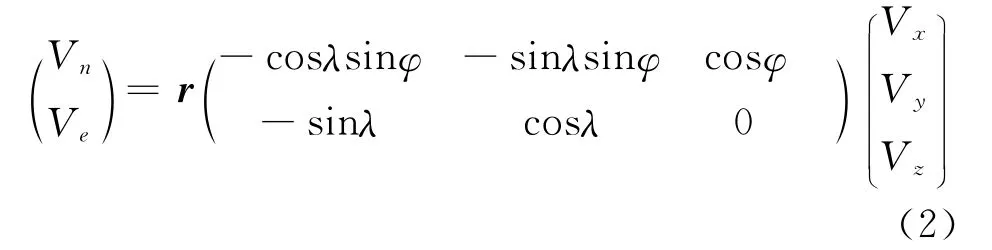
式中:λ和φ分别是测站的经度和纬度;r为每个点对应的矢径;[VnVe]为测站站心速度;[VxVyVz]为测站地心速度。

式中:[X,Y,Z]为站点站心三维坐标;[wx,wy,wz]为角速度分量。
需要注意的是,由于测站高程变化对Ve、Vn影响很小,故许多文献将式(3)近似表示为
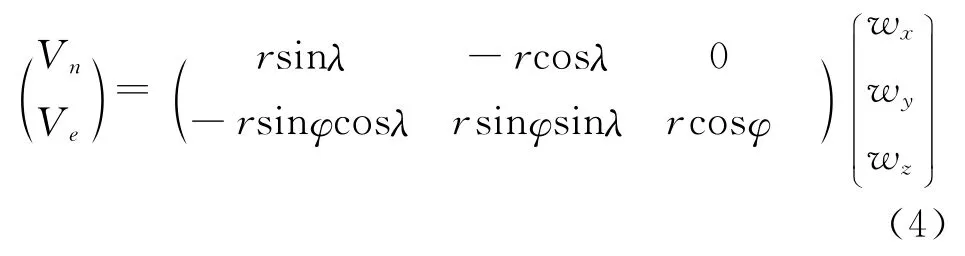
如果已知一定数量的点的位置坐标及其速度,可以按照式(4)求出欧拉矢量的分量wx,wy,wz,其欧拉矢量表示的球面坐标为(Ω,λ,φ)。
其中:
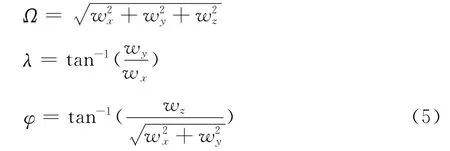
按误差传播率可得(Ω,λ,φ)的中误差
式中 [σΩσλσφ]为球面坐标误差分量。
2 数据处理
2.1 GPS数据融合
对速度场进行融合,必须将不同参考框架下的速度转到同一参考框架下。选用ITRF2005作为统一参考框架,经速度场数据融合,得到统一框架下的全球地壳运动水平速度场。具体分为三个步骤:①空间坐标框架转到ITRF2005参考框架;②区域参考框架转到ITRF2005参考框架;③用多组数据公共点融合速度场[6]。
1)空间坐标框架转到ITRF2005参考框架
国际地球自转服务组织(IERS)给出了多数ITRF参考框架之间的转换参数,利用这些转换参数可将相对某框架的速度转到目标框架下。但大多数情况下,参考框架间的转换参数是未知的,需要知道它们之间的转换关系,通过对应的IGS站的数据求转换参数,通常采用七参数的布尔沙(Bursa)模型。
2)区域参考框架转到ITRF2005参考框架
目前,研究地壳运动的速度场框架既有全球框架,如ITRF、WGS84等,也有区域参考框架,如相对欧亚参考框架、相对北美参考框架等。在研究区域问题时,区域框架比全球框架更能直观地反映地壳的运动情况。全球参考框架和区域参考框架都可用七参数转换方法转到统一的参考框架系统。
3)用多组数据的公共点进行速度场融合
经过以上两步处理,利用各组数据中的公共点,由最小二乘法求解出参考框架之间的转换参数,从而把不同框架下的速度转换到统一的ITRF2005参考框架下。多期观测数据转换到同一参考框架下后,数据可能存在重复与误差比较大的点。为了得到统一、自洽的速度场,还需进行数据融合工作。对于重复的测站,用加权平均方法得到最后的速度;对于后者,一般用2倍中误差进行筛选后删除[7]。
2.2 基于ITRF2005中国大陆水平运动场结果
选取从1990-2009年间研究中国大陆板块的速度场结果,通过数据融合得到中国大陆的水平运动速度场的结果,如图1所示。
从图中可以明显看出中国大陆整体运动基本特征,在全球ITRF2005框架下,中国大陆存在明显的向东运动。向东运动速率各个地块有所不同。其中,青藏地区东南和南北地震带的中南部最大,最大可以达到91.3mm/a,最小31.6mm/a,一般为40~60mm/a.其次为东南地区,最大可以达到65mm/a,最小为24.6mm/a,一般为30~40mm/a.最小的为东北地区,最大可以达到30.9mm/a,最小为18.2mm/a,平均大概在20~30mm/a.这个结果与李延兴结果从整体上有很好的一致性[8],只是数值略大一些。
2.3 最新ITRF2005基准下的中国大陆板块趋势结果
对中国大陆进行板块划分的结果比较多[1,8-11],采用石耀 霖结论 将中国 大 陆 划 分为9个块体,分别为东北块体(DB)、华北块体(HB)、华南块体(HN)、鄂尔多斯块体(EED)、川滇块体(CD)、准格尔-阿拉善块体(ZGE)、柴达木块体(CDM)、西藏块体(XZ)与塔里木块体(CLM)。
采用金双根对各个GPS数据进行台站刚体检验[12],通过得到的GPS的数据利用式(1)~式(5)计算以上9个块体的欧拉极位置以及转动角速度,如表1所示。
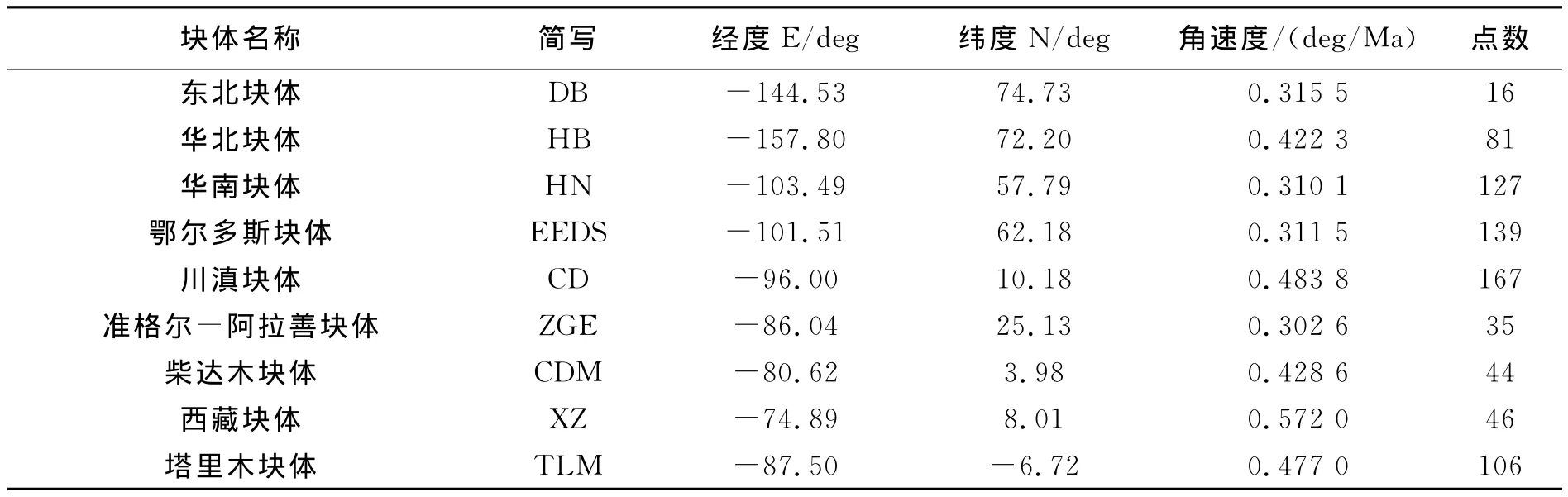
表1 中国大陆9个块体的绝对欧拉矢量(相对于ITRF2005)
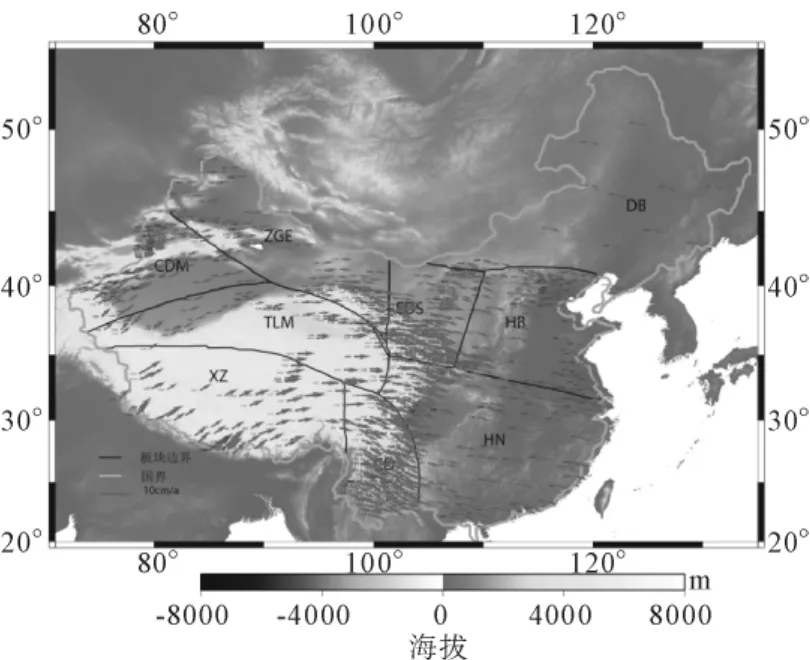
图1 1990-2009年基于ITRF2005框架下中国大陆GPS水平速度场
从表中可以看出,不同块体转动的角速度大小差异比较明显,欧拉极的位置差异也比较明显。一般来说,西部地区最大,其次为东南地区,最小的为东北地区。文中结果与张强得到的华南块体、塔里木块体结果基本上一致[13],与华北块体、川滇块体、西藏块体存在一定差异。本文结果与石耀霖结果存在明显的差别[1],主要原因有几条:
1)收集的GPS数据量不同;
2)收集数据具有平均性;
3)台站选取方法不同。
基于以上原因,导致结果存在一定差异性,然而文中通过多组数据计算得出的欧拉矢量具有一定的可靠性。由于目前GPS数据的收集以及测站的增加,对于各个板块的趋势精度具有很大的提高。
3 结 论
确定的中国地壳各个构造块体的欧拉矢量与丁国瑜建立的中国各个构造板块运动的地质学模型呈现较好的一致性[2],验证了丁国瑜所建立的地质学模型的可靠性和合理性。得出各个块体的运动速率明显大于丁国瑜的地质模型的值,对于其产生原因是一个值得进一步研究的重要课题。
通过多年的GPS成果分析中国各个构造块体的运动趋势,是目前地学研究中一个比较新的领域,结合目前大地测量中的数据融合技术方法,分析中国大陆的1990-2009年间平均的趋势,其结果具有明显的平均效果,虽然结果与多位学者结果存在一定差距,但是整体趋势具有一致性。
[1] 石耀霖,朱守彪.利用GPS观测资料划分现今活动块体的方法[J].大地测量与地球动力学,2004,24(2):1-5.
[2] 丁国瑜.中国岩石圈动力学概论[M].北京:地震出版社,1991.
[3] 马杏垣,丁国瑜.中国岩石圈动力学地图集[M].北京:中国地震出版社,1979.
[4] 杨国华,江在森,武艳强,等.中国大陆整体无净旋转基准及其应用[J].大地测量与地球动力学,2005,25(4):6-10.
[5] PETER B.An updated digital model of plate boundaries[J].Geochem.Geophys.Geosysr,2003,4(3):1027-1030.
[6] 郭东美,李 军,熊 熊,等.地壳运动速度场的数据融合研究[J].武汉大学学报·信息科学版,2008,33(2):212-215.
[7] 朱文耀,韩继龙,马文章.基于ITRF96和ITRF97板块运动模型[J].天文学报,2000,41(3).312-319.
[8] 李延兴,张静华,李 智,等.由GPS网融合得到的中国大陆及周边地区的地壳水平运动[J].测绘学报,2003,32(3):301-307.
[9] 黄立人,马 青.GPS测站所处构造位置的统计检验[J].地壳形变与地震,1999,19(4):27-31.
[10] 黄立人.用于相对稳定点组判别的QUAD法[J].大地测量与地球动力学,2002,22(2):10-15.
[11] 伍吉仓,邓康伟,陈永奇.用边长变化结果计算地应变及块体划分[J].大地测量与地球动力学,2002,22(4):35-38.
[12] 金双根,朱文耀.确定板块运动学模型的台站选取[J].大地测量与地球动力学,2003,23(3):56-60.
[13] 张 强,朱文耀.中国地壳各构造块体运动模型的初建[C]∥2000年中国博士后学术大会论文集,2000:223-227.