液压油缸内壁参数测量数据采集处理系统
2012-04-24秦自瑞于连栋孟广灿
秦自瑞,于连栋,孟广灿
(合肥工业大学仪器科学与光电工程学院,安徽合肥 23009)
液压传动在车辆、起重运输机械、工程机械、矿山设备及其他机械中具有广泛的应用。油缸作为液压传动中不可或缺的组成部分,其内径各参数的精度,将直接对传动系统的性能产生影响。
对类似于油缸内壁的孔径测量方法,一般分为直接测量法和间接测量法[1-9]。直接测量法是利用两点或三点定位,直接测量出孔径的方法。其常用测量工具包括内径千分尺、万能测长仪、卧式测长仪等,通用长度测量工具和内径测微仪、柔性坐标测量机等专用的孔径测量工具,但此类测量方法效率低、误差大,且不易用于深孔径和高精度产品的在线测量。间接测量法是利用三点定一圆原理,测出被测孔圆周上任意三点的坐标值,然后根据相关算法,求出圆心坐标,再换算出孔径尺寸和其他参数。此类方法效率高、误差小,可用于在线检测,本检测系统采用的就是间接测量法。
1 测量系统概述
测量系统的设计思想是,将4个高精度位移传感器安装在所设计的传感器夹具上,并将其放入被测油缸的内部,在气浮导轨的牵引下,平稳通过被测量油缸。将所获得的位移传感器的信号变化量,传送至上位机,应用间接测量方法的原理,将所测得数据转化为坐标变化量,通过最小二乘拟合数据,根据相关的数据处理运算,进而获得油缸内壁所需的多项参数。
本检测系统主要由硬件与软件两部分组成。其中,硬件部分主要由4个高精度位移传感器、4通道电感箱、数据采集卡、气浮导轨及上位机组成,系统的整体结构框图如图1所示。电感位移传感器一端接至4通道电感箱,然后将其4路电压信号的输出端连接至数据采集卡的模拟量输入通道口,数据采集卡内部的A/D功能模块对信号进行模数转换,转换后的数字信号通过PCI总线接口传输至上位机,进行相关的数据处理。与此同时,上位机通过PCI总线向数据采集卡内部传送各种气浮导轨的控制信号,进而控制气浮导轨的运动,这样就实现了上位机对现场4个位移传感器信号的采集和气浮导轨控制信号的传输。软件部分主要是基于VB 6.0的上位机数据采集和处理软件的开发设计。

图1 数据采集系统整体框图
2 硬件部分简介
检测系统主要目的是检测油缸内壁的圆柱度、直线度和直径等参数,因该检测系统测量精度要求范围是(-15 μm,+15 μm),且为动态测量,所以所选传感器必须是精度高、响应速度快的位移传感器。根据以上要求,系统选用瑞士TESA公司的电感位移传感器,也称电感测头,其为半桥型传感器,将位移变化转化为电信号,测量范围是 ±0.5 mm,轴向行程 1.25 mm,灵敏度是73.75 ±0.5 mV(V/mm),是线性误差 <0.2%,重复度 <0.2 μm。
由于所选的传感器的供电电源要是13 kHz的5 V交流电压源,为保证传感器输出信号的高稳定性和传输的便捷性,为其配备了通道电感箱。
因在检测过程中,需要接受大量的传感器信号传入上位机进行实时处理和分析,这就需要高速且大容量的数据采集装置,系统采用研华公司的PCI-1711高速数据采集卡,为用户提供了所需的测量和控制功能,可提供16通道单端 A/D输入,12 bit A/D转换,采样率最高可达100 kHz,每个输入通道的增益可单独编程,用户可根据每个通道不同的输入电压类型来选择不同的增益系数,进行相应的输入范围设定,卡上1 kB采样FIFO缓冲器,可编程计数器/定时器,自动通道/增益扫描[10]。
3 软件设计
3.1 数据采集
由PCI-1711进行数据采集的编程方式可分为3种:软件触发方式、中断方式和DMA方式[11]。软件方式就是软件命令触发数据转换,该方式编程相对简单,但采集数据速度较慢,多用于低速数据采集;中断传输方式比软件传输方式采样速度高,模拟量输入中断传输方式有两种:一种方式是每一次转换产生一个中断;另一种方式是把转换数据保存在FIFO中。根据硬件的不同,当FIFO半满或全满时产生一个中断,设备驱动接收到中断后会发送不同的事件告知用户当前采样状态;DMA方式是三者中数据传输最快的,数据在没有CPU介入的情况下直接在设备和内存间传输,设备驱动会探测数据转换状态,并发送合适的事件通知用户[12-13]。系统在软件程序中调用动态链接库,采用DMA方式下的FIFO功能进行信号数据的传输。本系统数据采集是用的第3种方式——DMA方式,结合Visual Basic 6.0开发平台,数据采集流程如图2所示。

图2 DMA方式数据采集流程
3.2 数据处理
用4个电感位移传感器测量油缸内壁的参数,其根本原理是通过把测量截面的4个传感器所测得的位移变化量,转化为其所在坐标平面内的坐标值,然后通过这4个坐标值,利用最小二乘拟合,拟合出此油缸被测量截面的实际圆心位置坐标和油缸直径。该测量过程的关键点在于将电感位移传感器所测量的变化转换成对应的坐标值的变化。在理想的情况下,夹具上所安装传感器的轴线正交,轴线的交点和标准环规的中心重合,以此相交轴线为坐标轴、相交点为原点建立直角坐标系,那这4个位移传感器所测得转化的坐标则分别为(x1,y1),(x2,y2),(x3,y3),(x4,y4)。
3.2.1 最小二乘拟合原理
假设所测量截面为XY,4个位移传感器所测量转化后的位置坐标分别为 P1(x1,y1),P2(x2,y2),P3(x3,y3),P4(x4,y4)此4 点均在所拟合的圆上,理想圆方程为

所谓求拟合圆,即确定上式中圆心坐标(x0,y0)和半径的值。按最小二乘法定义,应该以求目标F(x0,y0,的最小值来定参数。其中

经一系列推导之后,求解结果为
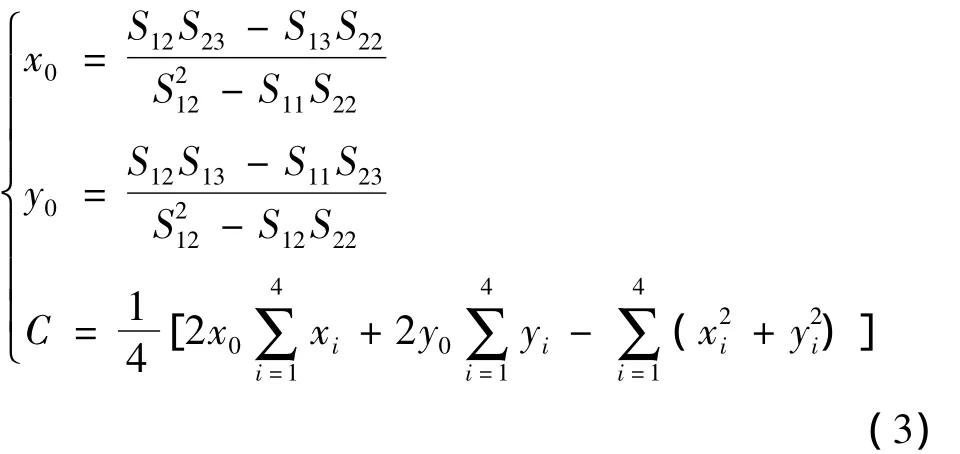
其中

只有当圆心坐标(x0,y0)足够小时,才能作线性变换C=++R2。若(x0,y0)不是足够小,会带来线性误差,这时需以求得的圆心坐标(x0,y0)为新坐标的原点,对测量数据点进行坐标平移后在进行最小二乘拟合,直到求得坐标(x0,y0)为足够小[14-15]。本测量系统的拟合圆心坐标(x0,y0)足够小,所以测量坐标不用进行坐标变换。
3.2.2 误差处理
系统的测量误差主要包括温度变化引起的测量装置变形误差,传感器精度误差,传感器安装误差等,由于测量环境可以进行恒温控制和所选传感器为高精度传感器,所以上述前两项误差可以忽略不计,但传感器的安装误差应该予以消除。传感器的安装误差可分3个方面:
(1)坐标系原点偏心误差,即安装位移传感器的正交轴线的交点和被测件的中心有一点偏差。
(2)位移传感器安装轴线非正交引起的坐标位置误差。
(3)位移传感器安装轴线非正交和理想坐标系原点偏心误差在测量时所带来的误差。
由上述拟合方法,经所编写的软件进行实时数据处理,即可快速地得到油缸的直线度、圆柱度和油缸半径。图3为测量系统的软件界面。
图3 测量系统的软件界面
4 结束语
介绍了的液压油缸内径参数检测的数据采集处理系统,测量精度高、效率高,可用于在线检测的环境中,通过测量出液压油缸内壁的直径、直线度、圆柱度等参数,可快速地检验其产品是否符合出厂精度要求,具有很强的实用性,该系统可在产品的深孔参数检测领域内进行推广。
[1] 尤政,梁晋文.高精度大型工件内径自动测量系统[J].航空计测技术,1995,15(2):3 -5,8.
[2] 林葵生.大孔径工件内径的测量[J].计量与测试技术,1995(6)11-12.
[3] 李均.数字式精密孔径测量系统及其传感器[J].测控技术,1996,15(2):30 -31.
[4] 乔亚天.梯度折射率光学与通信[J].西安邮电学院学报,1999(6):39-42.
[5] 李小娟,王黎,高晓蓉,等.超声无损检测成像技术[J].现代电子技术,2010,34(21):128 -130.
[6] 徐安桃,付敬业,郑义忠,等.小深孔内径电容传感测量系统的研究[J].传感技术学报,2002,19(6):2460 -2463.
[7] 石心余,吴乐轩,董秀丽,等.柴油机缸套内径和活塞外径测量装置的研制[J].机械,2002,29(01):60-62.
[8] 范旭东,郭立美.环规内径的测量及不确定度的评定[J].现代制造技术与装备,2006(4):59-60.
[9] 杨秀华,赵世平,廖俊必.一种光纤式数字塞规仪的设计[J].中国测试技术,2004,3(2):14 -16.
[10]李文涛,肖俊生,江杰,等.基于传感器网络技术的深孔测径系统的设计[J].嵌入式技术,2007(7):44-46.
[11]杨坤,徐海峰,毛学良.深孔内径光电检测技术研究[J].科技资讯,2008(19):7.
[12] ADVANTECH CO,Ltd.PCI-1711 User Manual.(2010 -09-10)[2010 -03 -29].http://www.advantech.com.cn.
[13] Advantech Co.,Ltd.研华设备驱动册[EB/OL].(2011 -03 -02)[2012 -03 -25]http://www.advantech.com.cn/eAutomation.
[14]王少华,闫光辉,高鲜萍,等.基于PCI-1711板卡的驾驶员疲劳监测数据采集系统[J].天津工程师范学院学报,2010,20(2):33 -36.
[15]李锦,王琪,宫明广,等.基于PCI-1712的高速数据采集系统设计[J].科技广场,2009(11):121 -124.
[16]张国雄.三坐标测量机[M].天津:天津大学出版社,1999.
[17]刘书桂,李蓬,那永林.基于最小二乘原理的平面任意位置椭圆的评价[J].计量学报,2002,23(4):245-247.