基于圆心定位的全景图像拼接与展开
2012-04-24张忠民
张忠民,张 磊
(哈尔滨工程大学信息与通信工程学院,黑龙江哈尔滨 150001)
利用图像拼接方法获得全景图像,被广泛应用于航海、航空、遥感图像分析、医学图像分析等诸多领域。全景图像的展开是其具体应用中必不可少的环节。全景图像的拼接与展开要求获取大视角,宽范围的视觉信息[1]。
图像拼接技术的核心在于准确地找到不同图像间重叠部分的区域或范围,即图像配准问题。常用的配准算法有比值匹配法,它是从一幅图像的重叠区域中从部分相邻的两列中取出部分像素,然后比值作模板,在另一幅图像中搜索最佳匹配,这种算法计算量较小,但精度较低[1-2]。另外就是块匹配法,是以一幅图像重叠区域中的一块作为模板,从另一幅图像中搜索与此模板相似的匹配块。这种算法精度较高,但计算量过大。文中要求图像像素为4096×4096,如以上算法应用于实际系统中,那其精度低或计算量大速度慢的缺点尤为明显。
针对系统所拼图像的特殊性,提出一种基于圆心定位的全景图像拼接与展开算法,其计算量小、速度快、精度符合要求,适合实际应用。这种基于圆心定位的全景拼接算法是以两幅带拼接图像中的一幅为基准,建立坐标系,对两幅图片分别进行罗贝特边缘检测,确定两幅4096×3072待拼接的全景图像的边缘,并找出圆心,进行拼接,经过仿真实验,该算法速度快、精度高、适合实际需要[3]。
1 图像预处理
全景视觉采集系统镜头由两片CCD组成,单个CCD输出图像的分辨率为4096×3072。镜头同时采集一组大小为4096×3072,光照、旋转等相同图像,拼接后图像的分辨率为4096×4096。系统镜头有明显黑色圆形边缘,具有特殊性。针对此特殊性,文中提出一种基于圆心定位的全景图像拼接方法。该设计首先需要对两幅图像进行灰度处理并提取图像边缘[4]。
Robert算子是一种利用局部差分寻找边缘的算子。由式(1)给出

其中,f(x,y)是具有整数像素坐标的输入图像灰度,在实际应用中常采用交叉差分计算。各像素关系如表1所示。

表1 Robert算子的像素点位置
Robert算子是2×2的算子,对陡峭的低噪声图像响应最好[5]。
该系统具有特殊定位性,如果找到镜头所采集图像的圆心即可进行定位拼接。圆形的直径只有唯一的值且每条直径都通过圆心,圆形边缘已由上述Robert算子求出[6],图1为原始图像以及经过Robert检测的图像。
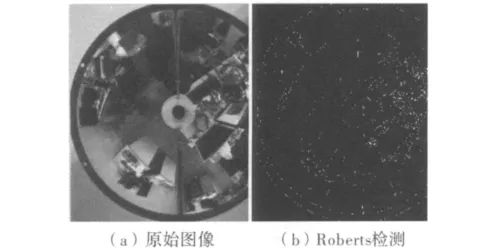
图1 原始图像以及经过Robert检测的图像
利用上述方法对CCD1及CCD2所采集的图像分别进行处理,得到两幅边缘检测图像,为图像拼接做准备。两幅图像的边缘较为明显,符合系统图像拼接要求。
2 针对系统的拼接方案
由于现有硬件的图像采集设备,镜头由两片CCD成一定角度组成,由于每片CCD像素阵列均为4096×3072,因此拼接所形成的传感区域包含的像素阵列为4096×4096,中间重叠区的大小为4096×1024。因此须将上述采集的两幅图像进行拼接处理。
拼接的关键是找到每一片CCD的分割线,文中针对CCD所采集到图像的特征,设计了一种基于圆心定位的图像拼接算法。由于采集到的图像主要信息在两个大圆内,因此要完成图像拼接,只要找到两个大圆的圆心,便可确定每一个图像的拼接分割线,所以实现拼接的关键是找到圆心坐标。由于处在圆的直径端点上的两点距离最大,而直径的中心即圆心的位置,所以只要找到圆上距离最大的两点的位置,便可确定圆的一条直径,从而确定圆心的位置。算法的具体步骤如下:
(1)将图像变为灰度图像,并进行图像边缘提取边缘上的点灰度值为1,否则为0,确定大圆上的点,设f1为右侧即横坐标方向有缺失的图像,f2为左侧有缺失的图像。
(2)为防止取到圆上缺失部分的点,在f1上取一点,其中,η1,μ1∈[0,1]的随机数。c,t为f1,f2横纵像素点的个数。同理 f2在上取一点
(3)计算f1上灰度值为1的点距离S1的欧式距离,找到距离点S1最远的点,设为A1,然后计算f1上灰度值为一的点距离A1的欧式距离,找到距离点A1最远的点,设为B1,于是A1,B1即为圆上某直径的两个端点,则f1图像的圆心,如图3所示,用同样方法多次求圆心坐标,取平均值,同理可得f2图像的圆心
(4)由于两幅图像的纵坐标方向上不会产生偏差,所以根据圆心的横坐标即确定两幅图割线的位置,取f1中所有横坐标值小于圆心O1横坐标值的像素点,与取f2中所有横坐标值大于圆心O2横坐标值的像素点,进行拼接,于是得到拼接图像。
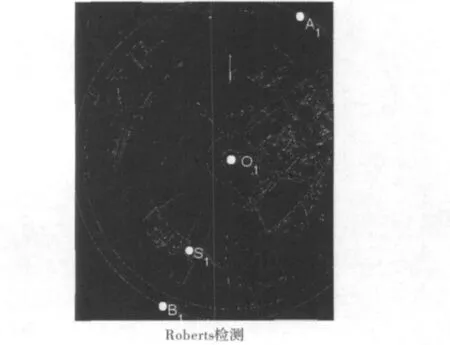
图2 边缘点的取得
由图2可知,由于实际中圆形的不完整性,经上述方法找到的直径端点可能是圆形缺失边缘,即图中Robert检测右边缘部分,这就增大了算法的不可靠性,因此,用算法中设定阈值来避免这一可能性的发生。

图3 CCD采集图像
3 图像的展开
折反射全景成像装置拍摄的环状图像存在同心圆环状变形,须柱面展开,方能得到符合人眼视觉习惯的柱面全景图像。图4描述全景图像查表展开法的原理[8],预先计算出展开前及展开后图像之间的像素坐标映射关系,并保存到以下查找表中。
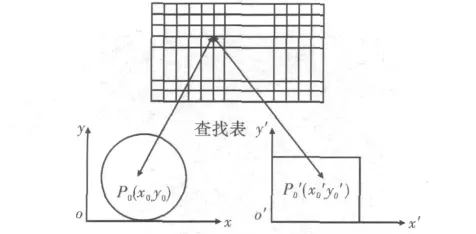
图4 全景图像查表展开法原理
对于展开后图像中的每一像素点,要在查找表中查询其在展开前全景图像中的像素坐标,即可较快地完成全景图像的展开。该方法既可避免复杂的三角运算,保证较高的全景展开精度,又具有较快的全景展开速度。但由于查找表和图像的数据量较大,而存储所需的SDRAM芯片在读写单个数据时效率低、速度慢,从而导致基于单个像素点进行查表展开速度较慢。为解决这一问题,采用图像分块展开策略。目标图像中的环带块,都将对应到源图像中的矩形像块,首先,对目标图像,源图像,查找表进行分块,变单个数据读写为数据块读写,进而完成图像展开[9]。算法需在FPGA上得以实现,具体步骤为(1)从SDRAM读出“查找表块”、“源图像块”,寄存于 FPGA片上 BLOCKRAM。(2)以块为点,进行查表衍射,将源图像块及查找表相对应,完成系统的图像展开[10]。
4 仿真实验
实验所用图像如图3(a),图3(b)所示。实验中选择计算3组圆心坐标并求其平均值,即

根据O1,O2的横坐标,可将f1,f2剪切为图5所示两部分(左为f1,右为f2)。图6为拼接后的图像。根据上述图像展开算法,得到符合人眼观看的全景展开图像,如图7所示。



5 结束语
经实验仿真,基于圆心定位的全景图像拼接法速度比以往图像拼接算法快、准确度高。展开后的图像符合实际要求,符合人眼观看习惯,但展开后的图像仍存在小部分失真现象,在之后的工作中需进一步的完善。总体上讲,在实际的全景应用中,文中所提出的算法具有良好的实用性。
[1] GONZALEZ R C.Digital image[M].北京:电子工业出版社,2004.
[2] 余宏生,金伟其.数字图像拼接方法研究进展[J].红外技术,2009,31(6):348 -352.
[3] 章毓晋.图像处理和分析[M].北京:清华大学出版社,1999.
[4] BOULT T E,GAO X,MICHEALS R,et al.Omni- directional visual surveillance[J].IEEE Transactions on Image and Computing,2004,22(7):515 -534.
[5] 张茂军.虚拟现实系统[M].北京:科学出版社,2001.
[6] CANDE S E J,DONOHO D L.Ridgelets:A key to higherdimensional intermittency[J].Philosophical Transactions of the Royal Society of London Series A,1999,357(1760):2495-2509.
[7] 白剑,杨国光,侯西云.1800大视场环形全景凝视成像方法200410015828.0[P].杭州:浙江大学,2004
[8] 张以漠.应用光学[M].北京:机械工业出版社,1982.
[9] MURPHY J R.Application of pnaoramic imaging to a teleoperated lunar rover[C].In Porceedings of the IEEE SMC Conference,1995:3117 - 312l.
[10]马颂德.计算机视觉一理论与算法基础[M].北京:科学出版社,1998.