基于涡格法的近程无人机气动优化与风洞实验验证
2012-04-17李大伟阎文成
李大伟,阎文成,江 峰
(1.北京航空航天大学无人驾驶飞行器设计研究所,北京 100191;2.中国空气动力研究与发展中心,四川绵阳 621000)
0 引 言
近程无人机广泛应用于战场侦察/监视等任务,其航时根据所需任务的不同从4~6h不等。根据现有无人机的气动布局特点,需进一步加大航程和航时,拟进行气动优化设计。在综合考虑各方面因素后,认为在不改变机翼展弦比的前提下,加装翼尖小翼提高全机升阻比是一种行之有效的方法。
国外对翼尖小翼的研究始于上世纪70年代,Whitcomb[1]研发了适用于高亚声速飞机的翼尖小翼,并加装在KC-135加油机上进行了试飞验证,结果表明,全机总阻力降低6.5%,航程增加7.5%。之后Asai[2]对翼尖小翼的气动原理进行了详细的分析与研究。
近年来翼尖小翼设计应用更加广泛[3-6],Conley等人[3]对Learjet喷气飞机进行了加装翼尖小翼风洞试验,他们认为小翼扭转角是一个关键参数,且跟飞机几何外形和飞行状态密切相关,一个优化的小翼只针对某一特定飞机的特定状态。Takenaka等人[4]发现翼尖小翼的关键参数是小翼展长和小翼外倾角。Bourdin等人[5]研究了不同翼尖小翼外倾角对飞机操纵性的影响,提出小翼可起到复合舵面的作用。Falcao等人[6]更进一步引入了自适应的概念,将翼尖小翼设计成可变外倾角和扭转角,根据飞行状态自动调整,以达到最优性能。
然而已有翼尖小翼针对的大多数是商用客机[7],对于低雷诺数的小型无人机或许并不适用,这类无人机普遍存在层流分离效应和非定常效应,使得升力系数随迎角呈非线性变化趋势[8],由于低雷诺数的限制,风洞试验的方法易受干扰,近年来,对这类无人机的数值模拟研究得到快速发展[9]。
在无人机上采用翼尖小翼主要目的是[10]:一方面通过增加升阻比提高飞行效率;另一方面提高航向稳定性,如美国的“扫描鹰”(Scan Eagle)轻型无人机,本身为无尾布局,航向稳定性不足,通过安装翼尖小翼可改善航向稳定性,此外“扫描鹰”无人机小翼上甚至安装了舵面,可以起到方向舵的作用。该研究对无人机的气动优化主要还是针对第一方面,也即提高无人机的续航性能。
此外在传统的翼尖小翼设计中,研究人员普遍采用设计多个小翼进行风洞实验的方法[3,11],需要大量时间和财力支持,这对小成本的无人机来说并不现实。
因此,针对近程小型无人机低飞行雷诺数的特点,从提高飞行效率,增加航时的角度出发,拟利用涡格法(VLM)进行无人机加装翼尖小翼的气动优化设计,最后通过全机低速风洞实验进行优化结果的验证。
1 翼尖小翼设计与气动特性分析
由于近程无人机的设计点为飞行速度38m/s,飞行高度为3000m,折合雷诺数约为9×105,相比民机属于低雷诺数范围。因此翼尖小翼的设计要适应低雷诺数飞行的实际需求。
在这里主要采用目前在民机领域广泛应用的融合式翼尖小翼,融合式翼尖小翼比传统Whitcomb小翼可提高约60%的性能[7],融合式小翼几何外形如图1所示。
影响翼尖小翼特性的几何参数有:小翼的高度(height)、根弦长(root chord)、尖弦长(tip chord)、外倾角(cant)、扭转角(tip twist)、1/4弦线后掠角(1/4 chord sweep)和翼型等,详见图1。在这里选取小翼扭转角和外倾角两个参数进行受力分析。

图1 翼尖小翼的相关几何参数Fig.1 Winglet geometry
小翼扭转角受力分析示意图如图2所示。在前方来流的作用下,翼尖小翼受到的气动力可分解为两个分量:一个是垂直来流的分量,将给机翼造成附加弯矩;另一个是平行来流的分量,相当于向前的推力,间接地减小了阻力。但随扭转角增大,小翼抑制机翼展向流动的效果变差,从而使诱导阻力变大。
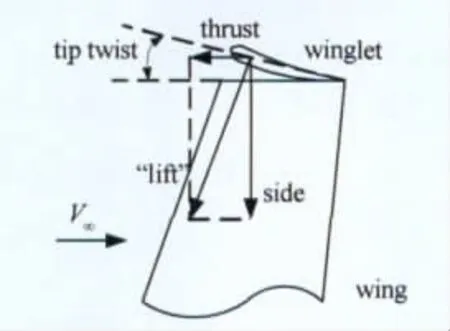
图2 小翼扭转角气动力分析示意Fig.2 Aerodynamic analysis of the tip twist angle
外倾角受力分析如图3所示。外倾角的作用与分析小翼扭转角影响相类似,一个分量给机翼造成附加弯矩;另一个分量提供附加向上的升力,间接提高全机升阻比。与扭转角类似地,随着外倾角减小,全机诱导阻力有增大的趋势。
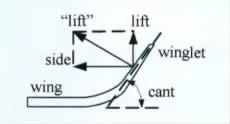
图3 小翼外倾角气动力分析示意Fig.3 Aerodynamic analysis of the cant angle
此外,在确定翼尖小翼参数的最佳组合时,一方面要使其减阻效益最大化,尽量提高全机升阻比;另一方面要注意其对全机横航向静稳定性带来的影响以及对机翼翼根产生的额外弯矩。
2 涡格法
2.1 涡格法(VLM)原理
涡格法是面元法中最简单的一种,是以升力面为基础的比较实用的数值计算方法,并随着计算机的发展而发展起来的。涡格法的基本计算步骤如下。
首先将机翼划分为若干个面元,每个面元上布置一个马蹄涡,则在整个翼面及其后方尾涡面沿展向和弦向形成有限个离散马蹄涡。
其次,利用毕奥-萨瓦定理(如图4所示,涡线对空间任一点产生诱导速度)计算所有马蹄涡在控制点处的诱导速度,并根据在控制点处的机翼绕流的边界条件,建立马蹄涡量的线性方程组,从而求解这个涡量。在此基础上,可以通过弦向积分和展向积分获得机翼的整体升力系数。计算机方法非常适于基于方程组的矩阵计算。
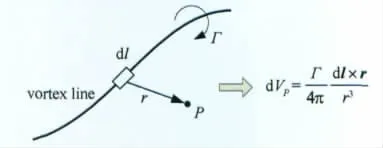
图4 涡线对空间任意点产生诱导速度示意Fig.4 Induced velocity by the vortex line
采用目前较为流行的涡格法计算软件Tornado。Tornado是瑞典皇家工学院Thomas Melin[12]开发的基于Matlab的开源程序,其原理基于涡格法,是一种高效的数值解法。
2.2 基于涡格法的无人机及小翼建模
利用Tornado软件定义的无人机几何外形如图5所示,机翼、平尾、立尾和机身分别布置面元网格和控制点,翼尖小翼处进行局部网格加密,以提高计算精度。计算条件以无人机巡航状态(设计点)为初始条件。

2.3 涡格法计算结果分析
针对第1节对翼尖小翼的气动分析结果,选择小翼的外倾角和扭转角两个参数进行仿真分析,仿真结果如图6所示,分别为不同迎角下不同外倾角和不同翼尖扭转角对应的全机升阻比,升阻比大小用云图表示。

图6 不同迎角下的全机升阻比云图Fig.6 The lift to drag ratio images with different angles of attack
从图6可看出,在相同迎角下,翼尖小翼扭转角和外倾角对全机升阻比影响都比较小。因此,进一步分析其他小翼参数,对扭转角和后掠角进行对比分析,如图7(a)所示。从图中可看出,对于全机最大升阻比,扭转角和后掠角之间存在最优值。
此外出于对翼尖小翼抑制机翼展向流动效果的研究,增加了不同小翼高度(展长)下不同迎角对应的全机升阻比云图,如图7(b)所示,升阻比对展长变化并不敏感。

图7 升阻比云图Fig.7 The lift to drag ratio images
翼尖小翼参数确定后,进行加装小翼前后的无人机全机低速风洞实验验证。
3 风洞实验
无人机加装翼尖小翼前后对比低速风洞实验在中国空气动力研究与发展中心FL-13(8m×6m)低速风洞进行。
3.1 实验模型和设备
实验的无人机为1∶1真机,舵面安装有电驱动舵机,无人机通过串列双支杆腹撑支撑系统安装于低速风洞内,如图8所示。
试验选用TH-1301C天平,该天平可以满足无人机的六分力测量需求。

图8 无人机安装于8m×6m低速风洞内Fig.8 UAV in 8m×6mlow speed wind tunnel
3.2 测量系统
由VXI数据采集系统进行风洞实验的数据采集,采用风洞实验数据管理系统进行数据处理,风洞速压由计算机稳速压系统控制,模型姿态角控制采用计算机自动控制迎角、侧滑角机构。各设备之间由网络通讯或人工传递指令。采用倾角传感器测量模型实时迎角,选用的传感器精度优于0.01°。
3.3 风洞实验结果分析
增加翼尖小翼后,在相同实验条件下,机翼翼尖上翘的程度加大,如图9所示。这是由于增加翼尖小翼后,机翼根部承受的弯矩加大造成的。

图9 风洞实验翼侧视图照片Fig.9 Side view photos of wind tunnel test
图10~12给出了加装翼尖小翼前后全机纵向特性曲线图,从图中可看出,加装翼尖小翼后,相同迎角下全机升力略有提高,这是小翼外倾的贡献,但只限正迎角范围;全机阻力有所减小,这是翼尖小翼抑制翼尖涡的贡献;全机升阻比在正迎角范围内有所提升,且高升阻比对应的迎角范围有所扩大。
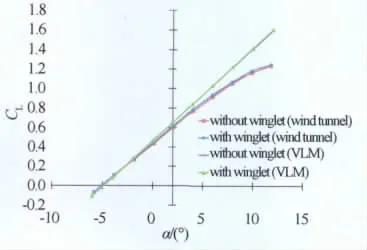
图10 全机升力系数随迎角变化曲线Fig.10 Variation of lift coefficient with angle of attack
此外,图10~12还加入了VLM的仿真结果,从图中可看出,VLM仿真结果与风洞实验结果在线性段相吻合,对于升力系数VLM只能给出线性段的数据;对于最大升力系数和失速迎角的判断,由于是低雷诺数层流分离,VLM无法模拟分离后的特性,因此还需依据风洞实验结果进行修正;从升阻比的VLM仿真结果可看出,VLM对全机加装翼尖小翼造成的升阻比增量预测准确。
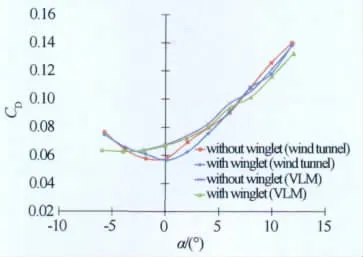
图11 全机阻力系数随迎角变化曲线Fig.11 Variation of drag coefficient with angle of attack

图12 全机升阻比随迎角变化曲线Fig.12 Variation of lift to drag ratio with angle of attack
图13~15给出了加装翼尖小翼前后飞机横侧向特性曲线(均在α=0°下测量),从图中可以看出,加装小翼后,全机滚转力矩导数从-0.00114减小至-0.00170,减小49%,这是由于机翼根部承受弯矩加大,增加了上反角,提高了全机的横向稳定性;全机偏航力矩导数变化很小,分析其原因为小翼展长较小,此外小翼布置在全机重心附近,因此对航向的影响较小;全机侧力导数从-0.00923减小至-0.0102,减小11%,小翼起到了立尾的作用。

图13 全机滚转力矩系数随侧滑角变化曲线Fig.13 Variation of rolling moment coefficient with angle of sideslip

图14 全机偏航力矩系数随侧滑角变化曲线Fig.14 Variation of yawing moment coefficient with angle of sideslip
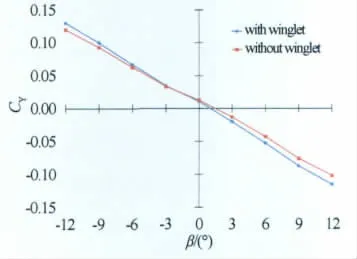
图15 全机侧力系数随侧滑角变化曲线Fig.15 Variation of side force coefficient with angle of sideslip
风洞实验结果验证了VLM仿真结果的正确性。对无人机加装翼尖小翼,可提高全机升阻比,增加航时;同时,加装小翼后,全机横航向操纵稳定特性也会发生改变,因此合理利用翼尖小翼可以大幅提高无人机的飞行性能。
4 结 论
近程无人机的巡航状态一般处于低飞行雷诺数,气动特性呈现与高速飞机不同的特点,利用涡格法(VLM)对无人机气动特性进行了加装翼尖小翼优化设计,设计中对小翼参数进行了优选,分析了小翼参数对全机升阻比的影响。结果表明:在相同迎角下,小翼外倾角、扭转角和展长对全机升阻比的影响都较小,只有后掠角和扭转角之间存在升阻比最优情况。
小翼参数确定后,通过低速风洞实验进行了吹风验证。实验结果表明,涡格法和风洞实验结果在线性段保持一致,涡格法能够较准确地描述和预测翼尖小翼特性,加装翼尖小翼后的无人机巡航状态(α=2°)升阻比提高12%。
此外,加装翼尖小翼后,全机横航向气动导数发生变化,全机滚转力矩导数Cβl减小49%,即滚转阻尼加大;偏航力矩导数Cβn保持不变,这主要是小翼布置在全机重心附近,因此对航向稳定性影响不大;侧力导数CβY减小11%,抗侧风能力有所下降。
[1] WHITCOMB,RICHARD T.A design approach and selected wind-tunnel results at high subsonic speeds for wing-tip mounted winglets[R].NASA TN D-8260,1976.
[2] ASAI K.Theoretical considerations in the aerodynamic effectiveness of winglets[J].Journal of Aircraft,1985,22(7):635-637.
[3] CONLEY,NORM.Winglet toe-out optimization for the gates learjet longhorn wing[J].Journal of Aircraft,1980,17(12):851-855.
[4] TAKENAKA KEIZO,HATANAKA KEITA.Multidisciplinary design exploration for a winglet[J].Journal of Aircraft,2008,45(5):1601-1611.
[5] BOURDIN P,GATTO A,FRISWELL M I.The application of variable cant angle winglets for morphing aircraft control[R].AIAA 2006-3660.
[6] FALCAO L,GOMES A,SULEMAN A.Design and analysis of an adaptive wingtip[R].AIAA 2011-2131.
[7] EBERHARD ELSHOLZ,SAMIRA BARAKAT.CFD analysis of twist correction on commercial aircraft wing with differem tip devices in ETW wind tunnel[R].AIAA 2006-0513.
[8] 李锋,白鹏,石文,等.微型飞行器低雷诺数空气动力学[J].力学进展,2007,37(2):257-267.
[9] 白鹏,崔尔杰,李锋,等.对称翼型低雷诺数小攻角升力系数非线性现象研究[J].力学学报,2006.38(1):1-8.
[10]SHELTON A,PRASAD JVR,SMITH M,et al.Active multiple winglets for improved UAV performance[R].AIAA 2004-4968.
[11]吴希拴,师小娟,王建培.无人机气动特性改进及风洞试验研究[J].空气动力学学报,2004,22(1):36-40.
[12]MELIN,THOMAS.A vortex lattice MATLAB implementation for linear aerodynamic wing applications[D].Royal Institute of Technology(KTH),2000.
