新型气胀手爪的研制
2012-04-10何鸿强
何鸿强,徐 慧
HE Hong-qiang,XU Hui
(北京机械工业自动化研究所,北京 100120)
0 引言
长期以来,于化纤、造纸、印刷、塑料、纺织等行业中,广泛存在对桶料的搬运工序,在自动化生产越来越发达的今天,传统的人工搬运生产模式无论从生产效率还是人力成本,都已无法适应现代化企业发展的要求。更多厂商现已投入机械自动化生产线,完成对料筒的搬运。
目前,用于撑持筒料的定位轴一般采用气胀式和机械式胀轴两种,而气胀式因其在使用过程中操作方便、省力、可靠、重量轻的特点,被大多数用户所接受。但现有的气胀轴采用楔形机械结构,缸身体积庞大,安装所需位置要求严苛,爪体紧缩半径较小,无法满足对种类繁多的料筒的抓取,因此急需研制一种能够灵活应用于生产流程,满足各种搬运要求的多功能手爪,下面介绍基于凸轮摆杆结构的新型气胀手爪的研制过程。
1 研究内容分析
1)操作对象
在本实际项目中,机械手爪需要搬运的对象为纱锭,重量为5.5公斤,高290mm,直径230mm,纸筒内径 67mm(具体尺寸如图1所示)。由于产品的特殊性,严禁损坏纱锭外表面,要求抓取形式必须是内胀式,且不能破坏纱筒内壁结构。这就要求手爪有更小的体积以及更牢固的抓取方式。由于纸筒上端有翻边,直径仅为57mm,考虑到定位的难度,实际要求手指收拢与张开的直径差至少需要26mm。
2)工作方式
在实际成产流程中,工艺要求必须满足一次性抓取多个纱团,并且各工位纱团放置位置都不尽相同,在搬运过程中需改变纱团间位置关系,这就要求研制的气胀手爪必须有小巧的体积,灵活方便的安装方式,适应性强的结构特点,并能够准确定位放置纱团。
2 机械性能指标及系统研究
2.1 新型内胀式手爪的研制思路
根据上述技术指标要求,传统气爪采用的楔形结构,由于三角形三边关系结构束缚,同等行程的气动元件,所能达到的半径变化量较小,无法满足产品要求,对于本产品纱团的抓取必须采取结构简单紧凑,紧缩半径较大,动作灵活、能够稳定撑持工件的内胀式手爪抓取。
我们借鉴凸轮结构及杠杆原理,巧妙的把普通气缸的直线运动变化成径向位置的变化,使其具有较好的传力特性,同时结构紧凑。
为了实现以上目的,本方案利用直线气缸推动主心轴杆上下运动,台阶面推动胀爪摆块圆周摆动,多个胀爪摆块的末端撑开以顶到工件内筒内表面而起到胀紧作用,从而起到胀紧工件的要求。通过主心轴台阶面的后止口顶住胀爪摆杆的上面起到定位的作用。
2.2 详细结构介绍
下面结合图2、图3对本研究气爪进行详细描述。
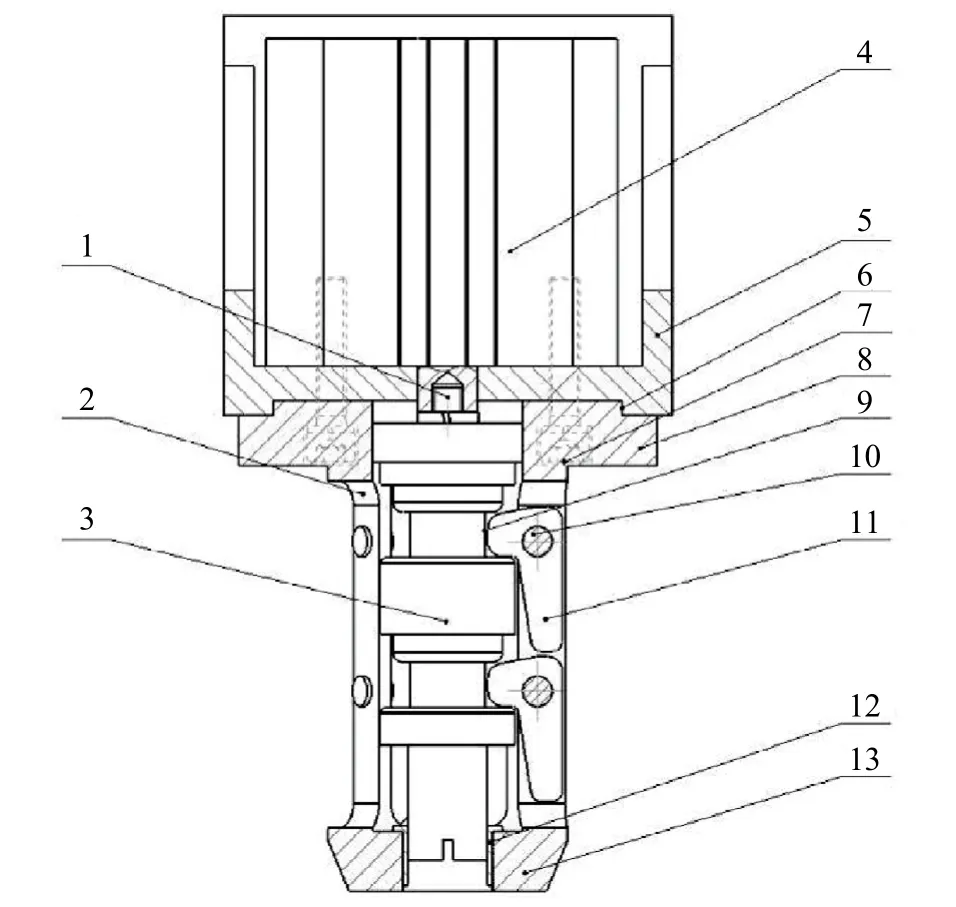
图2 凸轮式气胀手爪结构图
所述凸轮式气胀手爪包括:
主心轴杆顶部螺杆:用于主心轴与直线气缸的连接,实现动力的传输;
主框架:用于胀爪的固定安装,以及爪体与直线气缸的连接;
主芯轴:其上端有螺纹,与气缸连接,芯轴上有多个台阶,每组台阶间固定多个胀爪摆块,胀爪摆块呈上下位置排列,台阶面与凸轮摆块的凸轮面相接触,心轴底部伸入主框架底端的滑动轴承孔中;
直线气缸,其与支架连接,为动力源;
安装支架,用于气胀手爪与整体夹具的连接;
圆盘安装止口:用于准确定位,防止爪体在工作中产生窜动;
框架竖棱:用于安装胀爪摆块,是手爪的主体框架;

图3 凸轮式手爪外形图
凸轮面:主心轴上下运动时推动的胀爪摆块端面,是主要的受力部位;
胀爪连接轴:用于连接胀爪摆块于框架竖棱,是重要的连接件;
凸轮杆胀爪摆块:其用连接轴固定于框架竖棱间,是胀取工件的主要受力零件。
铜套:起到滑动润滑,减低磨损的作用;
框架顶端锥面:用于定位抓取时增大偏差允许量。
上述的凸轮式气胀手爪,其中,所述的直线气缸底部与主框架顶部利用四个螺钉连接。主框架由6条竖棱组成,每2条一组,上面各带有2排通孔,销轴分别穿过第一条棱、胀爪摆块和第二条棱,起到固定胀爪摆块的作用,销轴顶端利用圆锥销固定。胀爪摆块的突轮面与主心轴的台阶面相接触,通过直线气缸的运动,最终实现胀爪摆块的运动。
2.3 设计注意事项
1)对于摆块的凸轮面基圆半径选得越小,压力角越大,设计所得的凸轮尺寸虽小,但对受力情况不利,严重的还会发生自锁现象,因此在空间允许的条件下应选取较大的基圆半径以改善凸轮的受力情况。
2)摆块凸轮面容易磨损,主要原因之一是接触应力较大。促使凸轮磨损的因素还有载荷特性、几何参数、材料、表面粗糙度、腐蚀、滑动、润滑和加工情况等。其中润滑情况和材料选择对磨损寿命影响尤大。为了减小磨损、提高使用寿命,除限制接触应力外还要采取表面化学热处理等措施,以提高材料的表面硬度。
图4为加工成品图,图5为现场使用图。
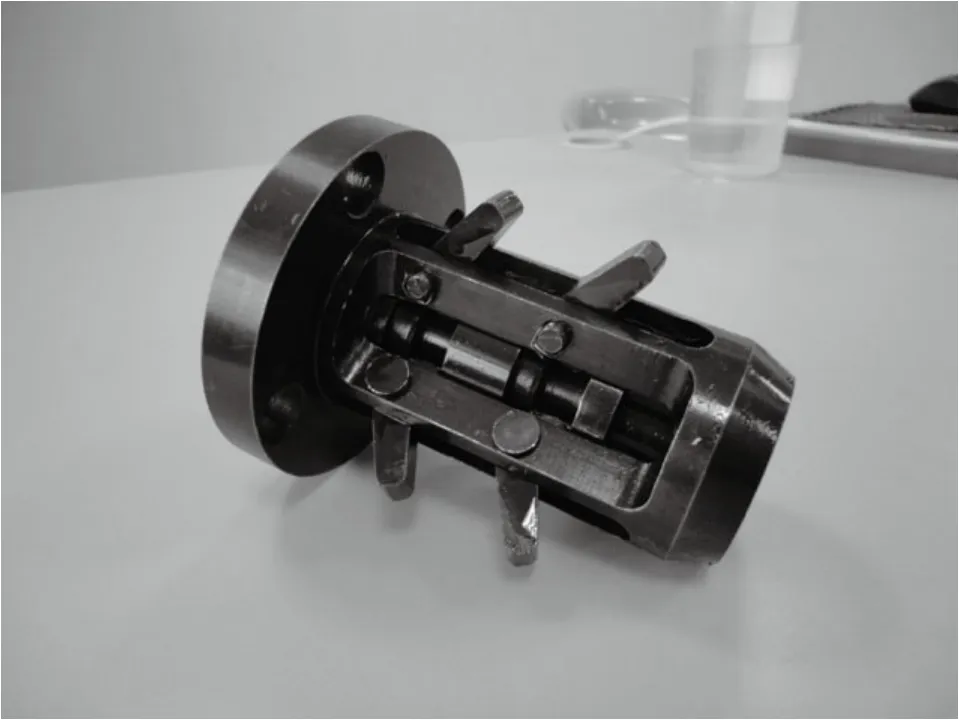
图4 凸轮式气胀手爪成品图
2.4 手爪动作监控措施
气胀手爪工作过程中,采用磁性开关信号监控。在抓取之前,检测气缸收回位置磁性开关是否有信号,以保证胀爪全部收回,能够顺利进行抓取。在胀爪达到抓取位置后,直线气缸运动,当检测到气缸到位位置磁性开关信号后,说明气爪已撑持住料筒,允许搬运动作。在此过程中,信号的检测,保证爪体不损伤料筒,并顺利完成抓取动作。
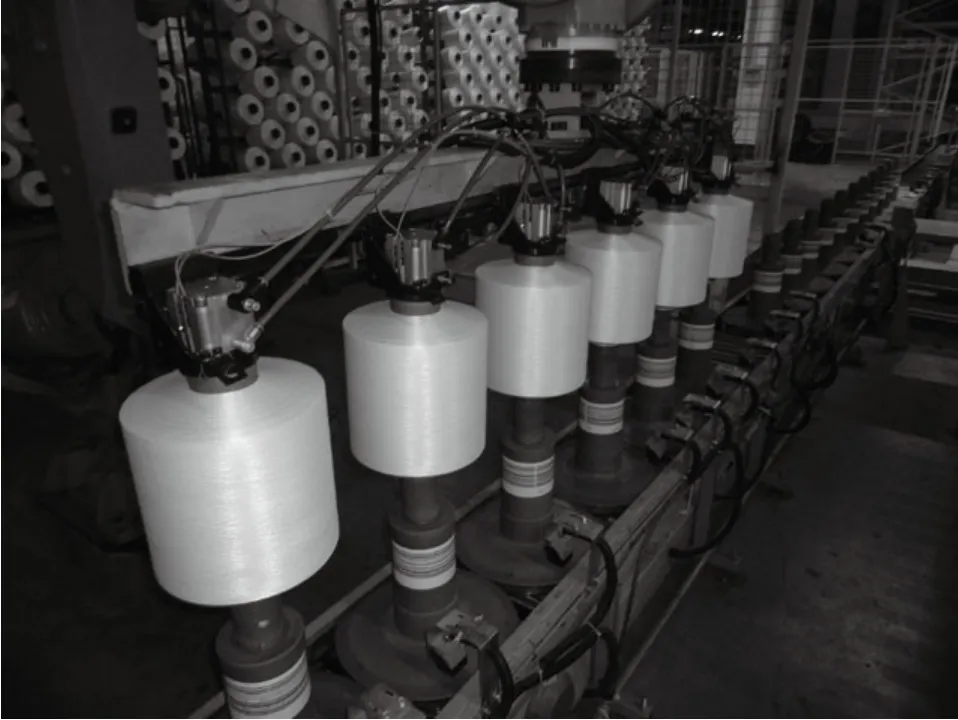
图5 1×6机械手气胀手爪
3 关键技术及创新点
本研究研制的内胀式手爪,结构是将气缸的直线行程转变为手指摆块的径向圆周变化,通过对气爪摆块形状的设计,可以满足各种工况下对胀爪的不同要求,同时大幅度降低了驱动装置的成本,给生产提供了经济、可靠的技术支持。
4 结束语
本研究成果已申请实用新型专利1项,并获批准。
气胀手爪在现有工程里均会使用上百套。如果采购国外的同类产品,每套约11500元。而我们研制的产品批量成本仅约为4000元,从经济上节约了大量成本。 且,此类机器人手爪的研制成功,不但可以在化纤行业广泛应用,还可以应用在玻纤、乳业食品等行业,为我单位开拓了更广泛的业务范围,进一步提高了竞争能力。
