一种视频图像改进卡尔曼滤波定位技术
2012-04-10邹丽霞陈贺明
邹丽霞,陈贺明
ZOU Li-xia,CHEN He-ming
(河南广播电视大学 信息工程系,郑州 450008)
0 引言
随着计算机处理能力的迅速提高,信息技术的快速发展,越来越多的机构开始采用监控跟踪系统,大家纷纷开始研究计算机中的运动问题,对于运动的分析在视觉系统中地位十分重要。运动分析的目的要按照运动线索找到对环境有价值的相关信息,用以执行更加高级的任务。视频跟踪是刚刚新兴的一个新方向,它融合了众多学科有模式识别、计算机视觉、人工智能等技术,在视频检索和压缩、智能交通等方面的前景都十分广阔。视频跟踪的前提是要获取运动目标,一般是根据已知的运动信息和自身特征,然后跟踪。图像序列的每一帧的位置坐标,将坐标连接就形成图像运动轨迹,若再得到各点的速度和加速度就是视频图像的运动信息。图像序列加入时间维和与其相关性约束,激发了研究者对视频理解的兴趣,视频跟踪技术作为必不可少的技术其作用显得日益重要。Kalman滤波的定位是将Kalman估计和目标检测方法相结合。由于目标检测容易受到外部干扰的影响,而引起检测不到目标或者检测到个数太多等问题,采用Kalman滤波跟踪的思想是:对图像序列的每一帧进行检测,同时用Kalman滤波器预测下一帧的位置,若无法确定就直接用预测的结果。
1 卡尔曼滤波算法
卡尔曼滤波是一种用途广泛的滤波方法,它要求是线性系统,而且系统中的噪声和状态变量要高斯分布。卡尔曼滤波是以状态空间方法为基础的递推滤波算法,它引入了一个概念叫状态变量。Kalman滤波对控制理论贡献很大,最早被用在航天领域,现在在视觉领域、图像处理领域中也广泛应用。现实中一般利用选择状态变量体现系统的特征以及状况的变化。卡尔曼滤波的模型主要包括两个状态模型和观测模型。状态空间模型是反映状态变化的规律,用状态方程描述相邻时刻的状态转移它的变化规律;观测模型是反映实际观测量值和状态变量它们的关系。Kalman滤波是将观测信息和状态转移规律相结合最后得到系统整体状态的最优估计。
卡尔曼滤波的计算流程如下:
计算状态估计值:
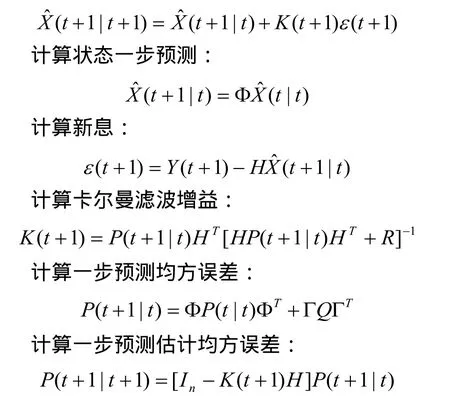
卡尔曼滤波的系统模型框图如图1所示。
2 卡尔曼滤波视频图像跟踪
2.1 视频图像跟踪
视频跟踪系统输入的是图像序列,图像目标的各种属性为输出,包括大小、速度、所在位置等。在现实中,由于受到各种干扰的影响,使得输出信息很难达到理想状态,不够准确和实时。本文所做就是一个用卡尔曼滤波视频跟踪图像。
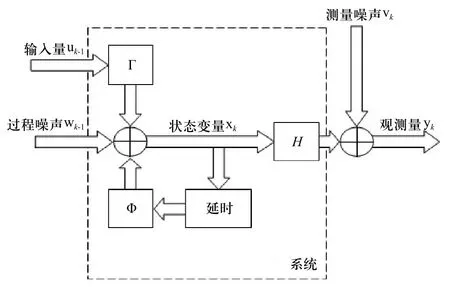
图1 卡尔曼滤波的系统模型
图像跟踪系统一般是对图像实时的分析和处理,能够识别出目标然后进行跟踪。主要有三个单元图像采集、识别跟踪和伺服系统。图像采集主要负责获取目标实际图像信息,通常用光学摄像机;整个系统的核心部分即识别跟踪单元,主要处理采集到的图像,包括预处理、图像识别、同步输出信号处理。该单元负责目标移动的方位差值,驱动伺服系统实现实时跟踪;伺服系统是具体实施部件。
图像跟踪系统可以直接处理提取的真实图像,避免自然条件和人为干扰影响跟踪精度.提高跟踪的可靠性、准确性;其次它可以适应潜在的环境变化,摄入的信息量比较大,因此其智能化程度非常高;还有它的抗干扰性和隐蔽性好,跟踪成功概率较高。图像跟踪系统可以对锁定目标自动跟踪,也可人为干预。人工干预能够提高跟踪的精度。目前图像跟踪方法主要有:基于相关的跟踪方法、基于特征的跟踪方法、基于模型的跟踪方法。
图像采集首先捕获场景上的图像,采用视频采集卡和检测技术,并且将视频信号由A/D转换成数字图像序列,提供数据为视频图像处理做准备。由于固体摄像器件的集成度较高,构简单,分辨率也高,信噪比高,和计算机连接容易,价格便宜等优点,因此被广泛的应用。
2.2 基于卡尔曼滤波的视频跟踪
视频图像中的跟踪是对图像理解很重要的一部分。卡尔曼滤波器能够从原始的包含各种噪声的视频图像中,对系统的序列做出最小协方差的线性估计,对目标的移动、速度和位置等做出较准确的预测。由上面介绍的卡尔曼滤波原理所说,在对目标跟踪时,先获得图像运动的速度和方向,若预测了目标下一位置,那么它可以预测出目标可能到达的位置,再进行模板匹配,缩小搜索范围,并且及时修正,缩短图像的运算时间,更好地实现图像定位。
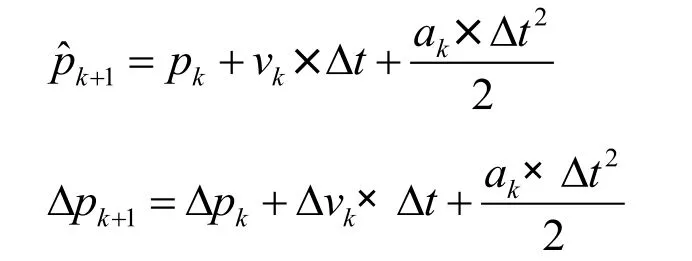
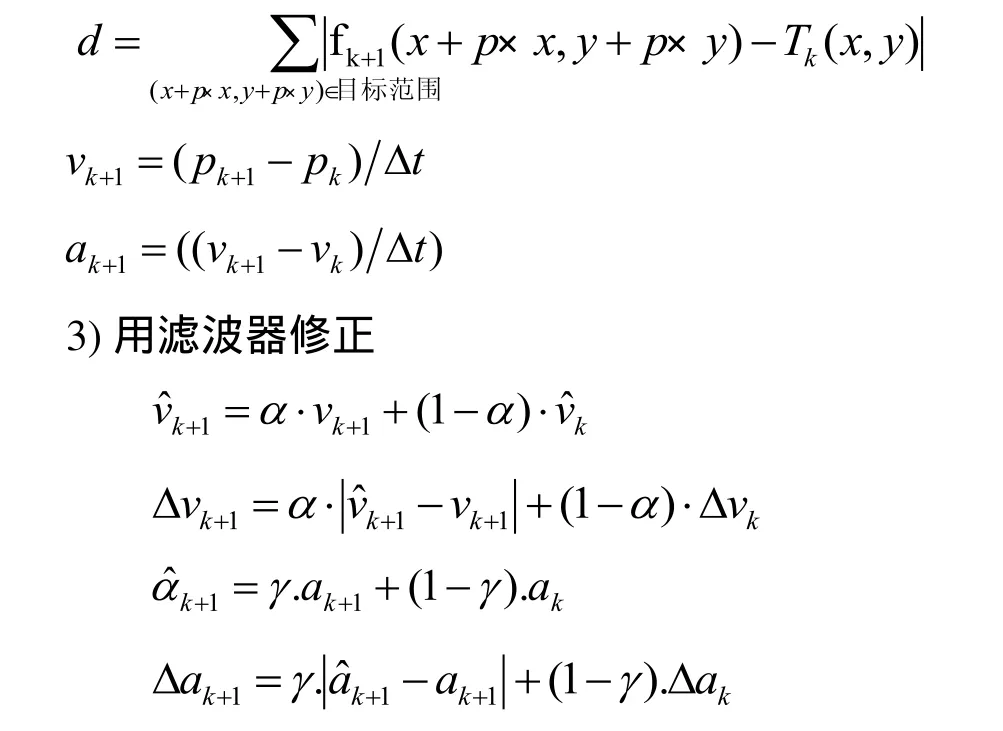
整个滤波器中,pk为第K时间中心实际位置;为时间K目标预测位置;Dpk为K时刻搜索范围;vk为测量速度;为估计速度;Dvk为估计速度误差;ak为测量加速度;为估算加速度;Dak为估算加速度误差;Tk为提取目标图像。
具体跟踪算法:
1)预测目标下一位置
2)目标搜索
在预测出的范围内搜索,如果在范围内找到目标且仅为1,则直接确定为目标。若范围内数量超过1,按照公式取匹配距离最小的目标区域来跟踪,把图像复制至:
3 实验
本文处理的原始图像分辨率为240×320,CPU为2.4GHz,内存为512M,视频采集卡的采样频率为 每秒25 帧。图2卡尔曼滤波定位实验图可以明显看到,仿真结果采用基于 Kalman滤波预测算法进行估计得到较好的效果,算法的实时性也很强,因而最终的提取车辆效果也比较理想。
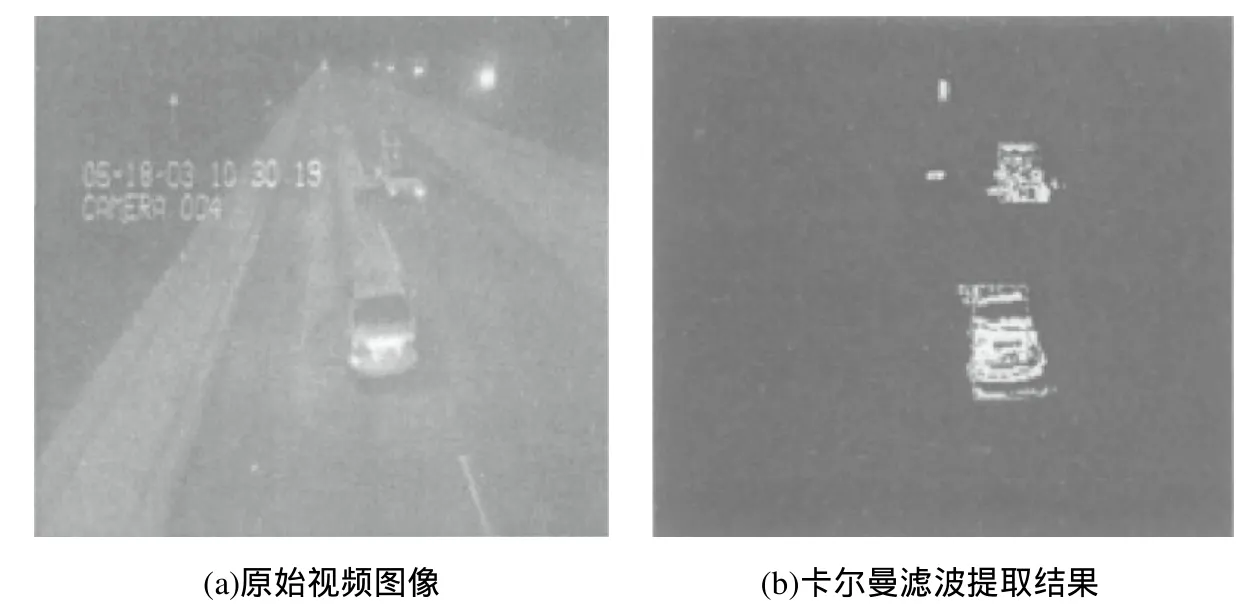
图2 卡尔曼滤波定位实验图
从图3看到,采用 Kalman 滤波得到的图像跟踪曲线和实际图像的曲线误差很小,用Kalman方法得到的曲线十分平滑,误差保持在一个较小范围内,和实际图像很接近,即使视频图像运动速度变得很小,其误差也得到有效控制。这是因为视频跟踪能够得到较详细的目标信息,当Kalman的跟踪方法加入运动目标的信息,算法的效果就好很多。
4 结束语
现今,计算机视觉研究的重点开始从静态图像向动态图像上过渡,视频图像跟踪就是检测每帧图像中运动目标,然后定位区域。它把图像处理、信息科学、自动控制相结合,形成了能够从图像中自动识别,提取目标信息,自动跟踪的技术。Kalman 滤波算法的基本思路是在时序中通过不断的预测和更新,使系统噪声、观测噪声等误差逐渐减小,最终获得最好的状态参数。Kalman 滤波方法是目前最优的递推滤波方法,很多领域得到了广泛的应用。本文详细介绍了Kalman方法和视频图像技术,实验分析得出Kalman方法能够得到令人满意的视频图像跟踪结果。
[1] 陈兵旗,孙明. Visual C++ 使用图像处理专业教程. 清华大学出版社,2004.
[2] 夏德深,傅德胜. 现代图像处理技术与应用. 东南大学出版社,2001.
[3] 肖敬若. 复杂背景下的实时目标跟踪技术研究[D]. 西安:西北工业大学,2006.
[4] 程刚. 视频环境中运动目标的检测与跟踪问题研究[D].西安: 西安理工大学,2005.
