一种新型机械式全可变气门正时机构
2012-03-28
(上海市闵行区颛兴路,上海201108)
一种新型机械式全可变气门正时机构
朱譞晟
(上海市闵行区颛兴路,上海201108)
介绍了一种纯机械式的连续可变气门驱动机构。该机构通过对一对摆杆摆动的角度和初始位置的控制,构成一个变速摆系统,并实现气门的持续开启时间的连续可调,且同时保持气门升程不变。此技术称作机械式FVVT(全可变气门正时)技术。
内燃机 全可变气门正时 变速摆
1 前言
宝马汽车公司的Valvetronic可变气门升程和正时技术使得汽油机第一次具有连续可变气门正时的能力[1],而后其他厂商例如日产也相继推出自己的类似产品,其基本原理大致相同,但以宝马的方法最为简洁。国内有学者详细分析了其运动规律[2]。在此技术基础上,当需要改变气门持续开启时间——作为主要目的而不是从属效果——例如从180℃A连续变化到360℃A时,显而易见的想法是能够用此技术或类似机构通过放大凸轮角度完成么?此技术或类似机构有个特征,就是气门升程与持续开启时间并非线性正比例关系,气门升程下降比气门持续开启时间缩短来得更快,单纯放大凸轮角而不改变机构设计,将使气门在180℃A持续开启时间时所具有的升程不足最大升程的一半,内燃机低转速全油门时进气不足,不利于内燃机的低转速功率和扭矩。
2 FVVT原理
本文分析一种可使气门持续开启时间连续可调同时保持气门升程不变的纯机械机构——机械式FVVT(Fully Variable Valve Timing)全可变气门正时技术,对其运行原理进行数学分析,此技术全称是包含变速摆机构的全可变气门正时机构。
在介绍这个机构原理之前,先了解变速摆系统是如何能够连续调节气门正时同时不改变气门升程的。参见图1至图3,一端固定的摆动杆,另外一端的滑动面接触到滚轮摇臂的滚轮,滑动面的凸起会在摆动到一定角度时推挤滚轮,使滚轮摇臂摆动,从而推动气门的开启。当摆动杆回摆时,释放滚轮摇臂,使气门关闭。正时的持续时间用下列公式近似表示:

其中,T表示如图2所示的具有固定角度的高角度凸轮的角度,TW表示工作于某个转速下的内燃机气门所需要的持续开启时间所对应的凸轮角度,A0是能够推动气门的部分摆杆端面的角度值,AX是摆杆实际摆动的角度值,图1中显示了三个特定值A0、A1、A2,其中A2是摆杆最大摆动角度,也就是AX的上限。初始位置指摆杆端面与滚轮接触的位置,不同位置表示摆杆的初始位置不同,因而摆杆摆动角度AX也不同。若我们连续调节AX,就可以得到连续可调的TW值,TW和AX成反比例关系,因为T和A0都是固定值。摆杆摆动终了位置的不变,因此气门升程是不变的。在图3的气门正时曲线中对应三条正时曲线,具有相同的升程,不同的持续时间,最大持续时间就是凸轮的角度T。因为摆杆摆动角度AX与凸轮角度T之商为摆杆的摆动角速率,因此变化的AX与不变的T形成了变速运动,即摆杆的摆动速率是连续可调节的,这构成了全可变气门正时机构的基础原理。
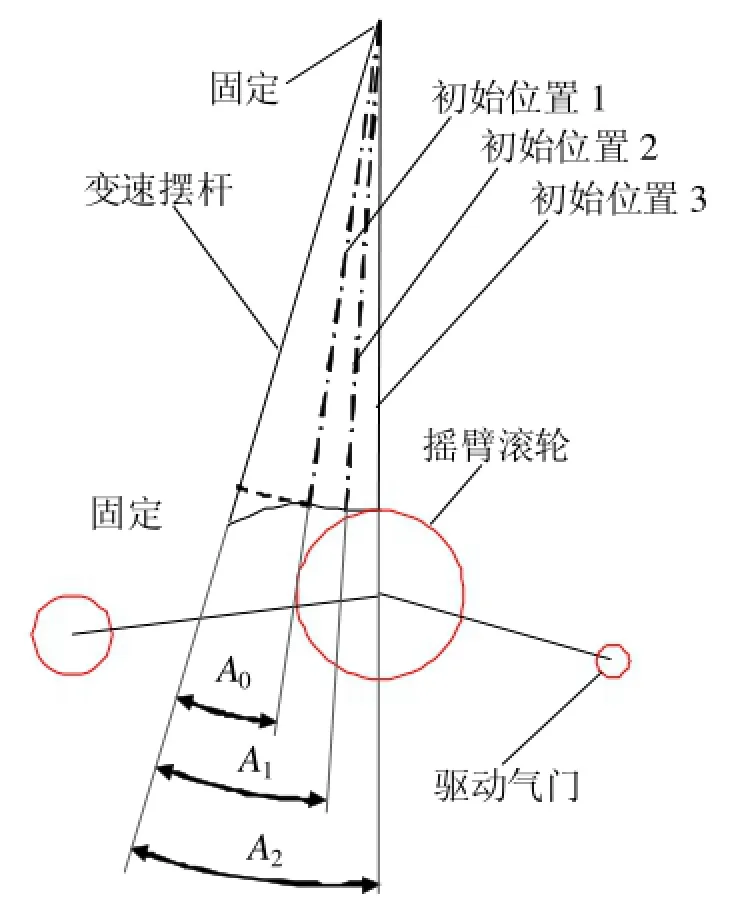
图1 变速摆杆的变速摆动
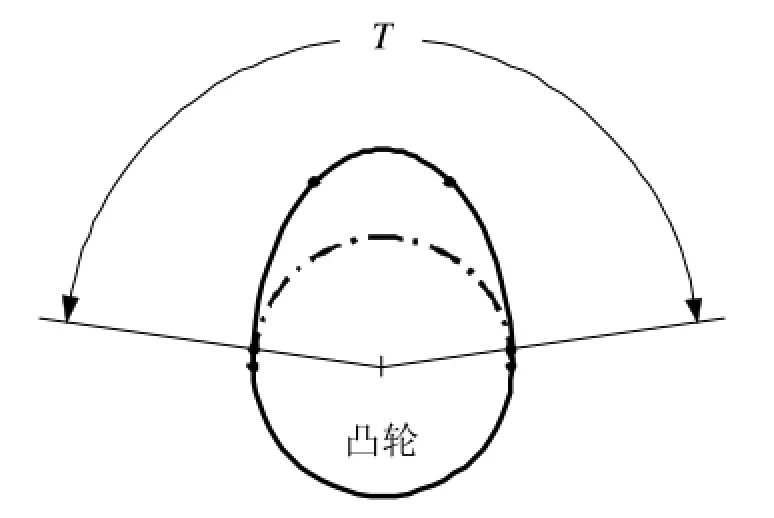
图2 FVVT技术使用的高角度凸轮
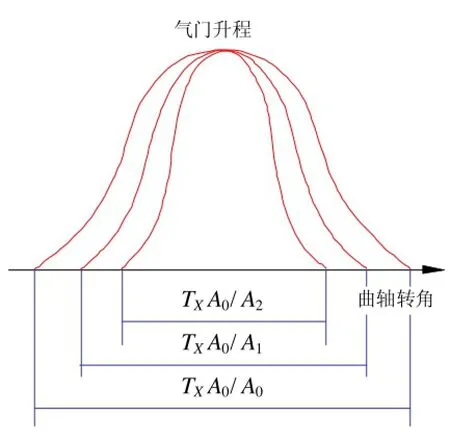
图3 FVVT技术的气门正时效果
3 FVVT机构设计和分析
根据所设想的FVVT机构原理,设计出如图所示的气门驱动机构,图中省略了一些显而易见的部分。次气门驱动机构的核心部分是一对可变摆动角速度和初始位置连续变化的变速摆及控制这对变速摆的控制凸轮。
在图4所示的机构简图中,凸轮1通过滚轮驱动变速摆杆7,变速摆杆7通过一根轴推动变速摆杆6围绕固定轴5摆动,控制凸轮8是变速摆杆7的支点,扭力簧3固定在固定座4上,为摆动杆6提供一个回复力矩。滚轮13、滚轮的轴14、滚轮摇臂15、气门19和液压挺柱20构成了常用的含滚轮摇臂的气门组件。下面将对这个机构进行分析和仿真计算。
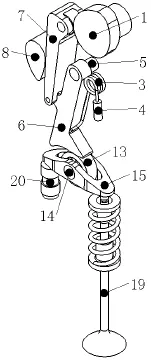
图4 FVVT全可变气正时机构简图
参考图5,RQ切凸轮1(轴心为A)和滚轮(轴心为F)于Q点,AR垂直于RQ,于是:
∠AQR与AQ决定了凸轮的形状,因此具有确定的关系,从而可求得所有∠AQR的角度下凸轮和主动摆杆滚轮之间的距离。应当注意,根据FVVT的原理,凸轮所对应曲轴的角度应当是超过通常凸轮角度的,我们这里选择了示例性的凸轮角度是360℃A,以下计算采用此数值。
图5 控制凸轮角度细节计算图
在图6中,AD与水平线垂直,DE与水平线平行。E是主动摆杆FE和从动摆杆CE的链接点。以F为圆心的圆是主动摆杆滚轮,以A为圆心的圆是凸轮的升程。A和C是凸轮和从动摆杆的固定位置,G是控制凸轮的固定位置。AF是任意角度下凸轮和主动摆杆滚轮之间的距离,令∠ECL=α1,∠AEF=α2,FE与 JK的夹角是 α3,∠AED=α4,EC=l1,EF=l2,则:

图7中虚线O是主动摆杆7在内燃机最低转速时的位置,GP垂直于虚线O于P点。GH是当前状态下控制凸轮对应于直线GP的位置。GM是水平线,GN是当前与IH的垂线。∠HGP是控制凸轮的旋转角度,因此:
令α5=α2+α3+α4,这是摆杆7和水平线的夹角,∠HGN=β1这是控制凸轮对于摆杆7的角度,∠HGP=β这是控制凸轮相对于水平线的转动角度,∠MGP=β'这是控制凸轮在最低转速的角度位置则:


图6 机构中控制凸轮和摆杆部分的简化图
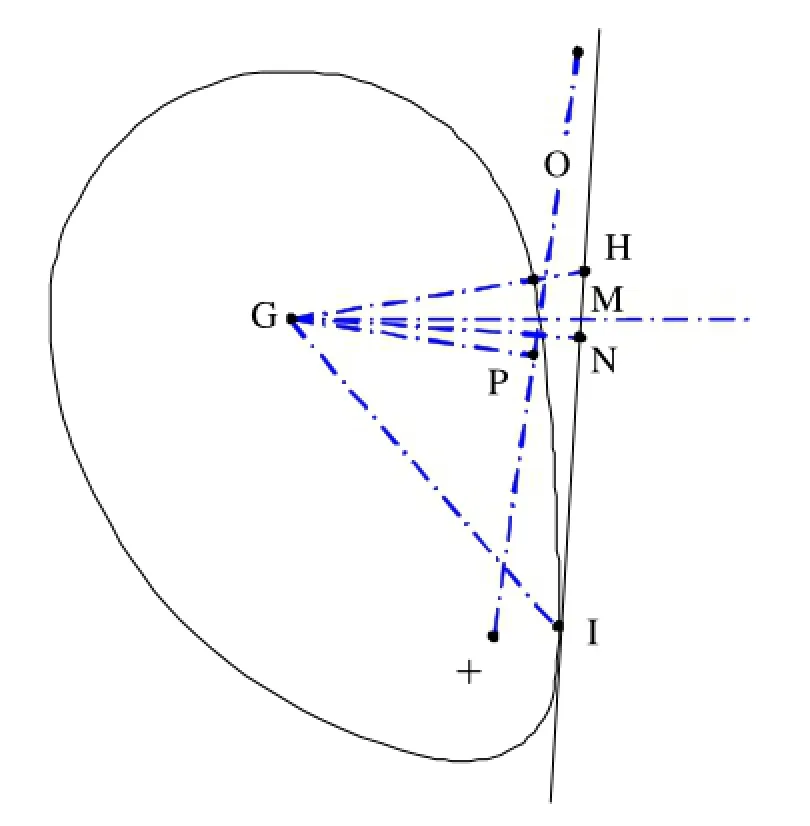
图7 控制凸轮角度细节计算图
β'是常数,由系统初始条件决定,β=β'时控制凸轮不对主动摆杆7产生额外推动。控制凸轮转动范围是β∈(β',β'+β0)控制凸轮对于主动摆杆的控制作用可用角度控制距离来理解,控制凸轮升程:

在(9)式中,控制凸轮的形状简单采用正弦曲线的一段来模拟,其中k1=k2+1。
根据JK到G的距离等于控制凸轮推动JK的效果,因此可以建立等式:

其中,x0、y0是G点的坐标,x、y是图4中JK所经过K点的坐标,k=tan(α2+α3+α4)=tan(α5)。方程(11)左边是关于α1的函数,右边是关于β1的函数,C点坐标为(xc,yc),另令∠FEK=α9,则有

α9是由主动摆杆7的形状决定的,因此设计完成后是一个常数。因此联系所有以上的方程,可知关于控制凸轮旋转角度β、凸轮对滚轮之间距离AF及从动摆杆角度α1存在以下的关系:

显然,从动摆杆的角度是由凸轮和控制凸轮的旋转角度唯一确定的,而根据从动摆杆的角度可以方便地计算出此时气门的升程。
关于(9)式,控制凸轮的具体形状与气门正时效果有直接关系,希望随控制凸轮的转动,可变气门正时机构的正时可以随转动角β1而变化。控制凸轮不是转动360°而在一个很小的角度范围内转动,即β∈(β',β0+β')。控制凸轮的形状根据内燃机低速和高速气门正时角度等效CA值之比来设计,即控制凸轮偏心部分所对应的弧线角度恰好是FVVT机构处于最高转速调节状态是主动摆杆7的转动角度范围。控制凸轮的形状由下列方程确定:

其中,Φ是控制凸轮轴心至控制凸轮偏心曲面上一点的距离R与曲面切线的夹角。同(2)式,R与Φ具有确定的关系,因而(13)式决定了(14)式。k1的选择,使得控制凸轮型线中与摆杆7接触的偏心部分的工作曲面没有平面存在。k1越大,控制凸轮型线的曲率半径越大,越接近直线;k1越小,控制凸轮所提供的距离改变越小,对正时调节的范围越小。经试验选择k1后,(13)式如下:

参考图8,由于主动摆杆FE的摆动会使F对A产生角向移动,因此准确判定凸轮角度还要得确定∠BAF=α6。先令∠BCE=α5,∠CBE=α7,∠BEF=α8。显然α5=α1+π/2,当我们设置初始值时,应使得α1不小于零,因此有
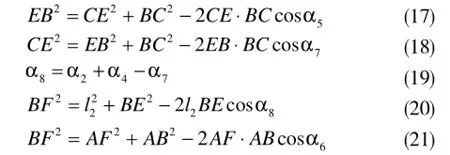
联立方程(17)至(21),可解算出AF与AB的角度α6,这个角度即滚轮中心对于凸轮1的方向,结合AF的距离的方程(2)、方程(13)和凸轮1的型线函数,可以得到凸轮角度φ与从动摆杆6的角度α1、控制凸轮角度的转动角度β关系如下:

可将从动变速摆杆6看作摆动的凸轮,α1就是凸轮的旋转角度,并依据函数(22)就可以合并计算得知气门升程与凸轮角度φ和控制凸轮角度β直接的数值关系,即连续可调气门正时的气门升程曲线图。相似计算也可参考文献[2]。

图8 对凸轮与滚轮角度的计算图
在计算仿真气门正时效果之前,假定:
(23)式是为简化计算所作假设,K是AF最小值。(24)式是α1与气门升程H的假设关系,0.507是A0角度的一个边界角度值(参见图1),气门处于最大升程时从动摆杆6的位置为0.507-A0。(25)式是气门相对于凸轮转角的修正,其中φ是凸轮的转角,φ(β,β1)是气门的CA,α'6(β1)是控制凸轮处于β角时凸轮推动摆杆7的角度,α6(β)是控制凸轮处于β角时凸轮未推动摆杆7的角度。模拟计算得到如下气门升程,参见图9。
根据图9,实验模型仿真计算得知:当凸轮角为360℃A时,内燃机在低转速(例如900 r/min)获得约216℃A的气门开启角度,在极高转速(例如10 000 r/min以上)获得360℃A的气门开启角度。低转速气门升程上升时间约112℃A,气门升程下降时间约104℃A。
从图9中可见高速正时曲线并非低速正时曲线简单沿着曲轴角坐标放大得到而是具有一个小的非线性改变,这是因为简单的控制凸轮和机构的双摆杆结构所导致的结果。控制凸轮这种形式的好处是简单,但会导致非线性结果。若采用稍复杂的移动滚轮机构替代控制凸轮来控制主动摆杆7的支点,则图9中高速正时曲线会更加接近于低速正时曲线沿曲轴角坐标的线性放大的结果。

图9 气门升程图
图9中的中等转速和低转速气门升程曲线的小于零的过冲是由于计算点少造成的。
4 FVVT的作用机理和应用
方程(10)、(12)、(23)是超越方程,可用数值方法求近似解。首先令α1和β为已知数,而后计算出所有需要知晓的参数,这是反向求解法,即求解的方向与机构工作时的驱动方向相反。这样做的意义在于:这是设计此机构的过程,即先制定从动变速摆杆的位置,而后再确定控制凸轮和凸轮的位置和形状,形状是根据从动摆杆和主动摆杆的长度和形状确定的,而摆杆的参数确定的原则是尽量减少摆杆摆动角度和整个驱动机构的体积。
全可变气门正时机构的几何原理是控制凸轮控制主动摆杆的支点位置,简单旋转一个β角度,使得L(β1)和α1产生改变,从而契合FVVT的原理。控制凸轮的作用亦可以被其他复杂机构替代,但控制凸轮这种形式的机构最为简单,因而以此为例解释机械式全可变气门正时机构的原理。从杠杆控制的角度来看,控制凸轮的h(β1)代表杠杆的转动,从而使杠杆的初始角度发生变化;而L(β1)代表着杠杆支点的变化,从而使杠杆阻力点行程改变;β1的角度限制则使得杠杆转动最终位置保持不变,因此气门最大升程不变。主动摆杆7的最大转动角度β0是机构初始值的一部分,这些初始值的确定的原则是使β0尽量小,但又要使机构的体积尽量小。
根据需要也可实现高转速时提高气门升程,低转速降低气门升程,类似于Valvetronic的作用但气门升程相差比较小,做到这一点仅需略微改变控制凸轮8的形状设计即可。公式(1)是近似公式,实际上需要根据FVVT机构的设计进行修正,使气门获得最佳的升程曲线。
本文仅是FVVT机构的最初的探索,一部分规律尚未掌握,更深入的研究真正进行。
5 结束语
本文阐明全可变气门正时FVVT技术原理,并具体分析了一种机械式全可变气门正时机构,表明此机构的气门正时由控制凸轮来操控,且保证气门升程不变。机械式FVVT技术有助于优化内燃机气门正时,并且结构相对简单。在本文FVVT技术基础上可继续探讨可变气门正时和升程各自独立调节的全调节机构,或可以替代电磁气门或电磁-液压气门驱动机构。
本文关于FVVT类似应用可参考美国专利[3],包含变速摆机构的全可变气正时机构的说明部分可参考中国实用新型专利[4]。
1屠卫星主编.可变气门正时系统机构原理与维修(第一版)[M].凤凰出版传媒集团/江苏科学技术出版社,2008.
2吴敌,杨海青.全可变气门机构运动学的仿真分析[J].柴油机设计与制造,2010(1).
3美国专利US6,659,053 B1《FULLY VARIABLE VALVE TRAIN》;
4中国实用新型专利ZL2010 2 0182127.7,《包含变速摆机构的全可变气正时机构》.
The Analysis of Mechanical Fully Variable Valve Timing Mechanism
Zhu Xuansheng
(Zhuanxing Road,Minhang District,Shanghai 201108,China)
This paper describes a purely mechanical way to build a continuous variable valve drive mechanism,through a pair of swinging the pendulum angle and the initial position of control to form a variable speed pendulum system,and to achieve continuous valve open time continuously adjustable,while maintaining the same valve lift.This technique is known as mechanical FVVT(fully variable valve timing) technology.
Internal combustion engine,Fully Variable Valve Timing,variable speed pendulum
10.3969/j.issn.1671-0614.2012.01.004
来稿日期:2011-09-05
朱譞晟(1976-),男,现主要研究方向为活塞式内燃机技术。
