基于单片机PWM驱动电路的智能遥控研究
2012-03-25林蔚
林蔚
基于单片机PWM驱动电路的智能遥控研究
林蔚
(漳州职业技术学院 电子工程系,福建 漳州 363000)
无线遥控器由TX-2B进行编码控制按键,将数字脉冲信号输入到AT89C51单片机的P1.0-P1.4口,控制单片机对应输出的P3.0-P3.3口的PWM信号控制功率管驱动电路,由直流电动机带动现有玩具小车机械传动装置,实现遥控电动玩具车的动作功能。
遥控;小车;TX-2B/RX-2B
1 引言
无线电遥控就是指利用电磁波,对被控对象按照所预定的意图对其内部参数、工作状态等进行远距离操纵和控制。
按照人们的意识,操纵着发射机上的旋钮或者摇杆,相当于控制模型车的指令,指令随即转成电信号向空中发射;装载在模型车上的遥控接收机收到空中发射来的电信号后,伺服舵机执行指令转变成机械运动,这样就实现对模型车的遥控[1]。此系无线电遥控设备工作的大体过程。
遥控设备的分类很多,本文介绍以下两种分类方式。有按其发射和接受通道的数量分类[2]和调制方式分类。按照通道分,简单地说就是发射和接受信号指令的通行道路,如前进和后退是一路;左右转向是一路。模型用遥控设备有两通道、四通道等多种。按照调制方式有振幅调制方式(AM)和频率调制方式[3](FM)等。
由于遥控技术可以降低生产劳动强度、提高劳动生产效率以及提高生产作业的安全性等诸多方面起着积极的作用,在工业自动化控制中的遥控技术的应用已愈来愈被人们重视。遥控技术的发展使人们享受着科学的魅力。尤其是企业减少劳动力、实现自动化控制的良好途径。无线电遥控技术及其系统对中国工程机械制造企业产生了巨大的吸引力。
2 设计框图和设计任务
2.1 系统整体框架及原理
整个遥控小车系统是基于单片机的PWM(脉冲宽度调制)调速电机驱动电路,分发射、接收模块和小车控制模块三个部分,设计框图如图1所示。
具备五种(前进、回退、左转、右转和加速)独立的无线电遥控装置,数据传输部分采用TX-2B/RX-2B组成的编码/解码电路,CMOS工艺制造,电源电压满足范围Vcc =2.5~5.0V,输出带载波的编码信号和不带载波的编码信号与相应的射频电路配合,实现5种独立遥控开关控制功能。

图1 基于单片机的PWM电机驱动电路的遥控小车系统整体结构框图
2.2 发射机和接收机预计需达到的要求与技术指标

表1 预期技术指标
2.3 小车控制器预计需达到的要求与技术指标
利用单片机AT89C51编写程序,控制小车实现以下状态:

表2 控制状态
具体设计如下:
(1)以单片机P1.0—P1.4作为输入口,接收接收机发送过来的信号;
(2)以单片机P3.0—P3.3作为输出口,发送信号到驱动电机部分;
(3)以单片机P0.0口处的发光二极管显示状态作参照,亮表示加速,不亮表示无加速状态;
(4)设计PWM(脉冲宽度调制)调速电机驱动电路。
3 具体电路设计方案论证与选择
3.1 自动控制模块的设计方案论证与选择
3.1.1系统的控制核心采用FPGA(现场可编程逻辑门阵列)
FPGA的特点是强大的资源、易于功能方面上的扩展和使用方便灵活,尤其结合了EDA,具备高效率。系统的多个部件可以集成到一块芯片上,有效地减小了系统的体积,提高了系统的稳定性。如频率测量电路,键盘控制电路,显示控制等部件。
3.1.2基于单片机技术的控制方案
与FPGA的并行处理方式相比较,单片机是通过对程序语句的顺序执行来建立与外部设备的通信和完成其内部运算处理,从而实现对信号的采集、处理和输出控制。串行处理是其最主要的特点。
上述两种控制方式除了在处理方式和处理能力(速度)上的差异外,在实现的效果以及复杂程度等方面也有显著的区别。FPGA将器件功能在一块芯片上,与单片机比较其外围电路较少,集成度高。但是单片机技术比较成熟,开发过程中可以利用的资源和工具丰富、价格便宜、成本低。鉴于本设计中,仅单片机的资源就能满足设计的需求,不能充分体现FPGA高速处理的优势;因此本设计的控制方案模块选用基于单片机技术的方案。单片机采用Intel公司生产的AT89C51,实现对收发模块的控制。
4 调速电机驱动电路的设计
4.1 系统设计方案
4.1.1马达
在遥控电动玩具车的设计中,使用标准微型直流马达。其工作电压通常介于4V-6V之间。设计中考虑玩具车的设计要求,在此次设计中使用双马达驱动。这里所谓的双马达驱动具体来说:前后两对车轮分别由两个马达驱动,后面的电机推动小车前进或后退,前面的电机控制小车的转向。其中后面的驱动马达可以考虑采用自动断电式马达。采用此种马达的电动玩具车在碰到障碍物阻挡时,马达会自动断电,这样可以有效防止电动机受到损坏[1]。
4.1.2驱动电路
根据要求设计简单的驱动电路,并借以现成的小车机械模型,通过接收到的遥控信号实现小车的走动功能。
4.2 方案论证
4.2.1 L293D驱动电路
为了实现小车的走动控制,首先采用直流电动机驱动芯片L293D,L293D是著名SGS公司的产品。为单块集成电路,高电压,高电流,四通道驱动,该芯片通过DTL或者TTL电平控制,输出信号易于控制电机,其额定工作电流为1A,最大可达1.5A,VSS电压最小4.5V,最大可达36V;VS电压最大值也是36V。L293D可以直接对电机进行控制,无须隔离电路。通过单片机的I/O输入改变芯片控制端的电平,即可以实现电机的正反转,停止的等操作,非常方便。同时直流电机转速可以采用SPCE061A两路PWM控制输出电压,通过编程使占空比以1/16的最小间隔在1/16-14/16间变化,以实现速度的调节。由L293D构成的简单驱动电路如图2所示。

图2 L293D驱动电路
缺点:在元件库中并未有L293D芯片,基于此电路易于实现的特点,设计中我们尽量采用现有元件制作电路,因此此电路暂不予以考虑。
4.2.2 PWM调速驱动电路
本设计选择PWM(脉冲宽度调制)调速[2]。性能指标如表3所示。
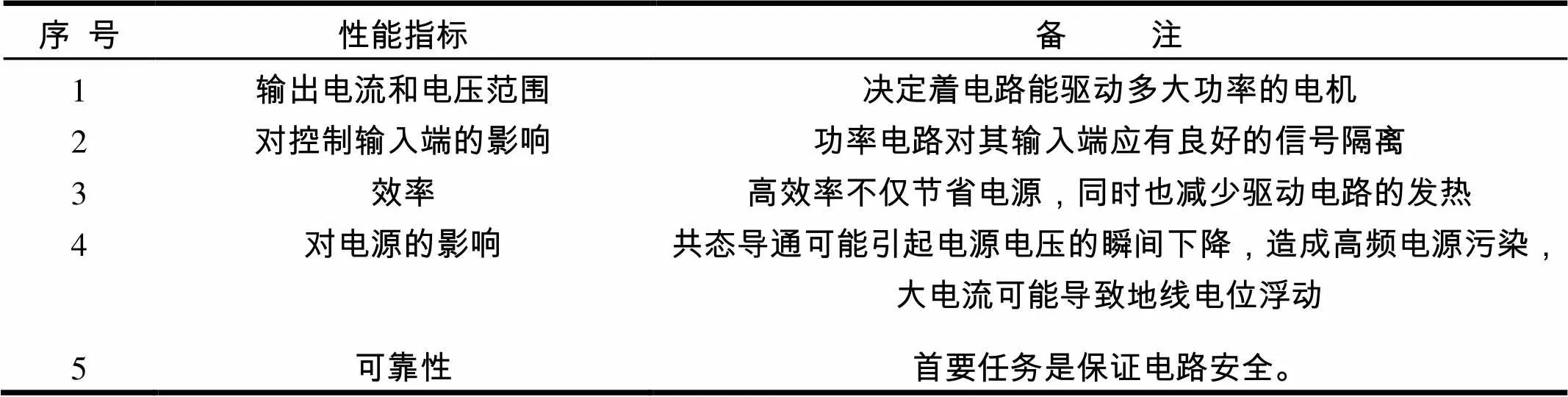
表3 性能指标
据以上思路,驱动电路采用H全桥方式,该电路由达林顿管 (2个TIP132和2个TIP137)、4个IN4001二极管以及与非门组成。

图3 H全桥方式驱动电路
H全桥方式驱动电路如图3所示,当PWM2、PWM4为低电平时,PWM1、PWM3为高电平时,T1、T4处于饱和导通状态,T2、T3处于截止状态,此时电流流向为T1→电机→T4,电机实现正转;当PWM2、PWM4为高电平时,PWM1、PWM3为低电平,那么T2、T3处于饱和导通,T1和T4为截止状态,电流从T2→电机→T3,电机实现反转(在这里,讨论电机正反转时PWM端并不表示此端为PWM信号)。通过以上参考电路,对图3中电路进行必要的改进,设计出基于单片机信号的直流电机驱动电路。
以上述设计方案为基础,拟定驱动电路采用PWM调速(占空比可调的脉冲)的方法实现,由单片机I/O口输出控制功率管驱动直流电机正反转,因此具体的参考电路流程框图如图4所示。
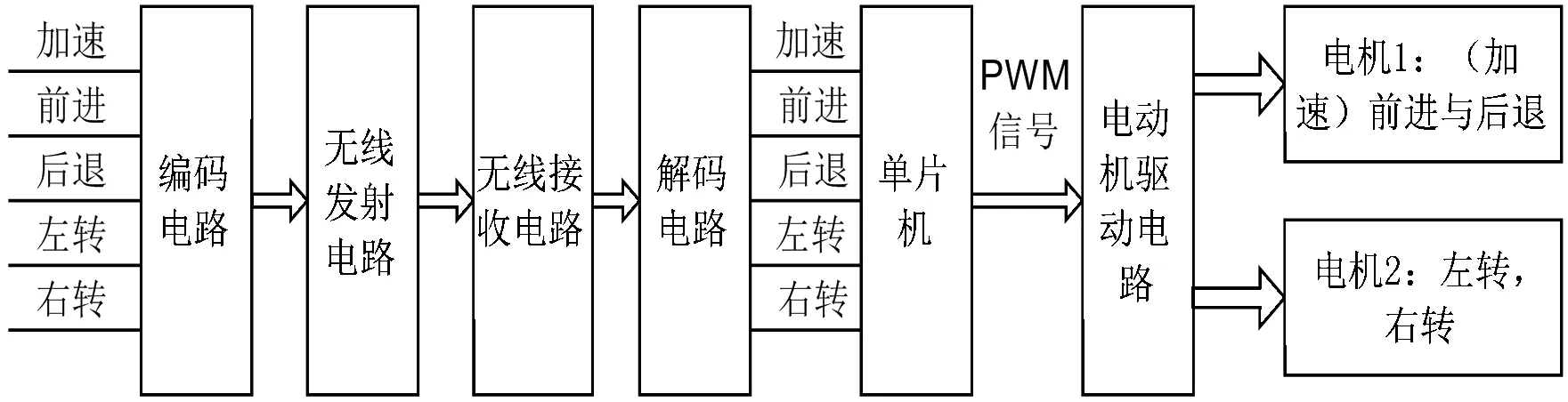
图4 单片机PWM驱动电机电路流程
编码前的5种状态分别对应相关的5个按键,其中当按下加速键时,小车处于加速状态,若要使小车保持正常速度应再按下加速键。5个按键中左右转按键独立于加速键,实际控制中不受其影响。
当操纵按键按下,通过无线发射电路信号传输到无线接收电路部分,利用其解码电路,将译码后的按键信号传输到单片机,通过单片机相关程序写入,顺利在单片机的I/O处获得PWM信号,PWM信号通过驱动电路实现两个电机的加速、前进、后退,以及左、右转向动作。[4]
通过以上电路和信号流程分析,设计如下驱动电路,具体原理图如图5、图6所示。

图5 功率管驱动直流电机正反转电路(a)
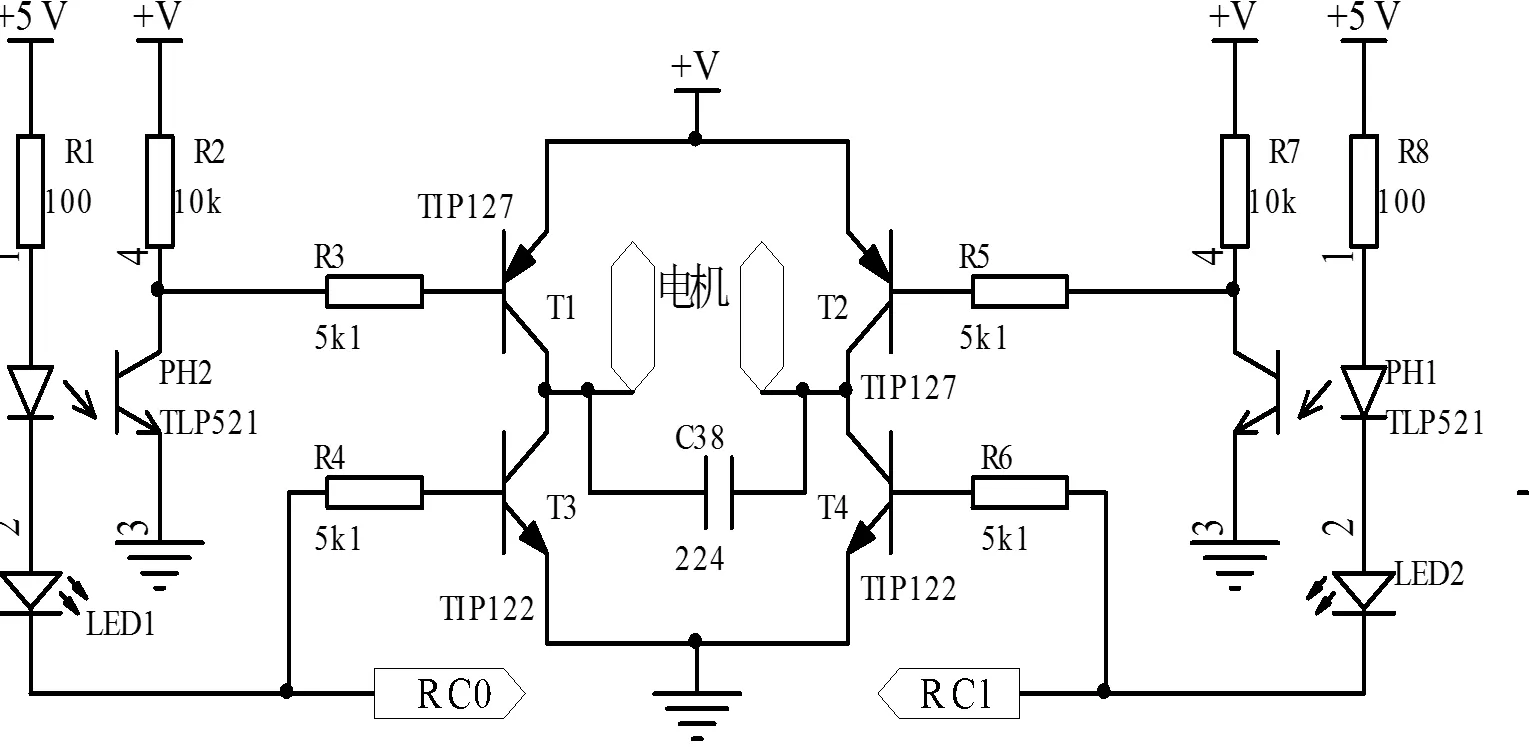
图6 功率管驱动直流电机正反转电路(b)
从设计图进行对比分析,如表4所示。
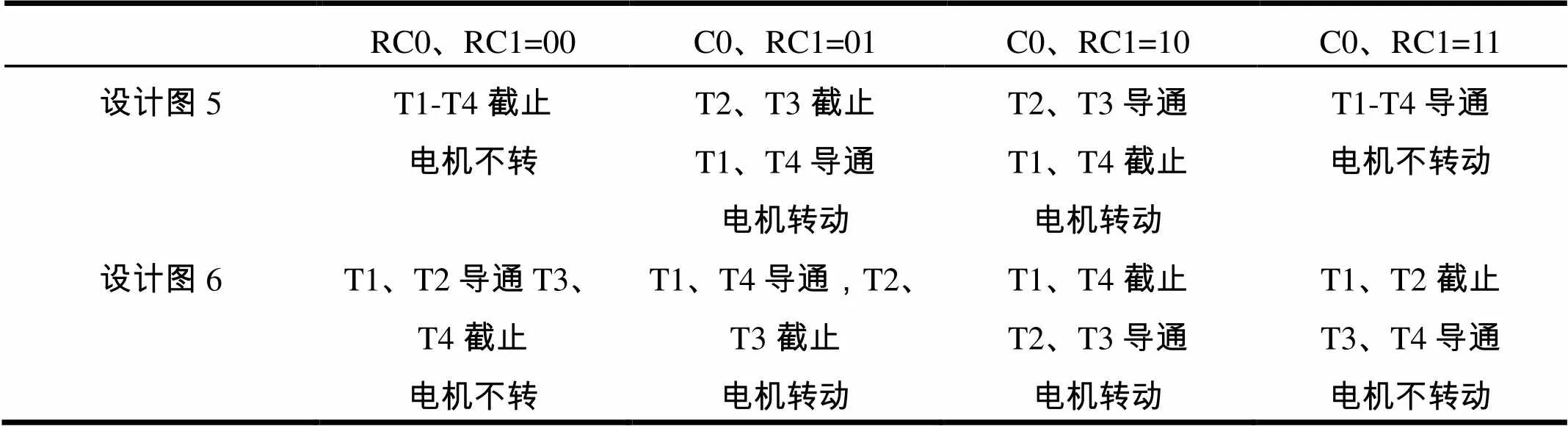
表4 状态分析表
图6中当RC0和RC1取值为11时,T1、T2、T3、T4 4个功率管都导通,+V电源经T1、T3和T2、T4到地,此时电机不转动,由于T1、T2和T3、T4导通时内阻很小,流过的电流很大,会导致功率管损坏,因此该取值为禁止状态。那么设计图6中,RC0和RC1同样的取值状态,T1和T2截止,T3与T4导通,加在电机两端上的电压差为0,电机停止不转。只需禁止RC0和RC1悬空状态,避免功率管损坏。
为了防止T1~T4全部导通引起电流过大的问题,本设计选择图6电路。
5 结论
采用TX-2B/RX-2B的编码/解码电路,实现控制按键的编码和解码的智能遥控设计。利用串联晶体振荡器产生30MHz的载波发射,通过进行ASK振幅键控。控制单片机对应输出的P3.0-P3.3口的PWM信号控制功率管驱动电路。实现智能遥控动作(前进、后退、加速、左右转)功能。
[1] 何书森.实用遥控电路原理与设计速成[M].福建:福建科学技术出版社,2002:56-63.
[2] 张晓东.无线电遥控模块、组件及应用[M].北京:新时代出版社,2001:98-106.
[3] 袁永明.无线电遥控技术[M].上海:上海教育出版社,1978:186-192.
[4] 郑江海,林钧峰,陈育群.基于AT89C51 PWM驱动电路遥控小车的研究[J].长春工业大学学报:自然科学版,2008(5):556-561.
(责任编辑:季平)
Research on a Remote-control of PWM Drive Base on Microchip
LIN Wei
(Electronic engineering department, Zhangzhou Institute of Technology, Zhangzhou 363000, China)
The base-band signal, coded by TX-2B for the control key-presses on remote device, and then decoded into digital impulse signal with RX-2B. If one of the P1.0-P1.4 of the AT89C51 detects the digital impulse signal, the AT89C51 controls the PWM to drive the power magnification circuit, which controls the mini car to be forward or backward, and turn left or turn right, even accelerate.
remote-control; mini car; TX-2B/RX-2B
2012-01-15
林蔚(1973-),女,福建漳州人,高级实验师,硕士。
TN832;TN851
A
1673-1417(2012)01-0001-06
