具有饱和补偿的碟形飞行器神经滑模控制
2012-03-24邬寅生沈庆楼施建洪
邬寅生,沈庆楼,施建洪
(1.海军航空工程学院控制工程系,山东 烟台 264001;2.海军指挥学院信息战研究系,南京 211800;3.海军驻哈尔滨地区航空军事代表室,哈尔滨 150060)
执行机构饱和特性看似简单,但却具有非线性特性,对其忽略或者处理不恰当,轻者影响控制系统的性能,重者危及系统安全,甚至会导致重大事故[1]。故而,对执行机构饱和受限控制系统的研究一直是控制领域的热点之一。文献[2]针对连续和离散线性系统,提出了一种系统的控制器设计方法用来补偿执行机构的饱和非线性。由于神经网络具有能够逼近任意非线性的能力,也被较多地用来处理饱和问题。文献[3-4]通过Hamilton-Jacobi-Bellman方程来研究执行机构饱和系统的最优控制问题。文献[5]通过B 样条神经网络研究了飞行器的参考轨迹跟踪问题。文献[6]利用神经网络逼近和反演控制方法,研究了远洋水面船舶的鲁棒自适应跟踪控制,控制器设计考虑了参数不确定性,未知扰动及执行机构饱和。这些文献在讨论执行机构饱和问题时,都假设饱和是对称的,并且执行机构的输出是可测的。文献[7-8]运用神经网络方法,研究了一类单输入非线性系统的饱和补偿问题,并假设执行机构的饱和非线性是未知的。但是对于过驱动系统,在考虑执行机构动态和模型不确定性的情况下,关于系统饱和补偿的讨论还比较少。
本文针对一类过驱动的碟形飞行器[9-11],在文献[7-8]的基础上,设计了一种具有饱和补偿的神经滑模控制器。考虑执行机构饱和非线性未知的情况,运用神经网络来估计执行机构的饱和量并进行相应的补偿,从而提高系统的稳定性。控制律的设计考虑了执行机构动态和各执行机构之间的协调配合,从而保证系统模型更接近实际情况,并能够产生最大的控制力矩。
1 碟形飞行器控制系统模型
碟形飞行器是一种呈圆盘形状、无尾无舵、翼身完全融合的非常规飞行器,控制方式采用变质量矩控制和推力矢量控制相结合的复合控制方式。考虑到推力矢量执行机构和运动滑块执行机构的动态特性,碟形飞行器纵向通道模型的线性近似形式可以表示为:
式(1)中:ϑ、ωz、θ分别为碟形飞行器俯仰角、俯仰角速度和轨迹倾角;1u、u2为执行机构指令信号;ξ、η为执行机构输出;1T、2T为执行机构时间常数;a24、a34、ξa、ax为模型线性化后基于基准弹道参数的动力学系数。
当考虑执行机构饱和以后,则式(1)就变成

以推力矢量执行机构为例,理想的饱和输出可以表示如下:

式(3)中:m为斜率,一般取m=1;ξmin和ξmax给出了饱和约束范围;2τ的表示与1τ类似。
不能由执行机构完全实现的那部分信号用δ1(t)表示为

后面的讨论将假设执行机构饱和非线性是未知的,从而将用神经网络来逼近函数δ1(t)。
2 控制器结构
针对过驱动的碟形飞行器,采用分层设计的方法进行控制器设计,即先采用比例控制分配[12]方法使推力矢量和质量滑块执行机构按一定的比例输出信号。这时可把对双执行机构的控制器设计简化成对单执行机构的控制器设计,并保证两执行机构的输出信号同时达到最大。然后,针对单执行机构的控制系统设计滑模变结构控制律,对于控制过程中可能出现的执行机构饱和,运用神经网络进行补偿。
具有饱和补偿的控制器结构框图如图1所示。由于执行机构饱和非线性是未知的,所以无法直接得到执行机构的状态量。但是可以用图中所示的方法来获得执行机构状态的估计,因而后面的分析仍然认为执行机构的状态是已知的。图1中,和分别是ξ和η的估计,cϑ为俯仰角指令信号,dϑ为期望俯仰角信号,e为误差信号。
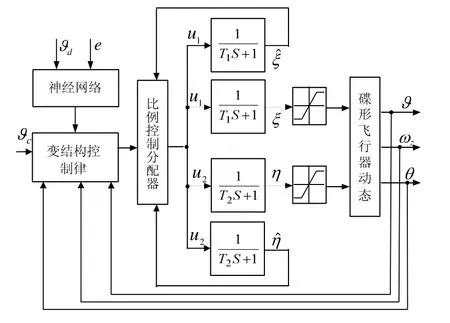
图1 具有饱和补偿的控制器结构框图
3 基于神经网络的饱和补偿控制器设计
先把对推力矢量和运动滑块的双输入控制简化成对推力矢量的单输入控制,选择比例控制分配方法对输入指令进行分配,即设

其中,kp为比例系数。则由式(2)可得:
令误差信号为e=ϑd−ϑ,则

定义切换函数为

选择c1、c2的值,使滑模面具有期望的动力学特性。对式(8)求导并考虑式(6)得:
又由式(4)可得:

定义:

则

把饱和看作是系统的一个扰动,如果执行机构没有出现饱和,系统可选择如下控制律:

如果执行机构出现饱和,就需要对控制律进行修正,即

对于未知非线性函数δ1,用径向基函数神经网络(RBF)来逼近,其表达式为

式(16)中:WT∈ Rn为未知最优权值向量,n为隐含层个数;为网络输入为神经网络隐含层,ϕi为高斯函数,可以表示为
式(17)中:ci和ib分别为RBF神经网络的中心和宽度;δε为对δ1逼近的网络重构误差。
对网络重构误差δε 及最优权值W 做以下假设:
1)下面不等式成立。

2)理想的神经网络最优权值是有界的,即对于已知的界Wm,即



其估计误差为

由以上定义可知:

考虑对δ1的估计后,取Lyapunov函数为

对上式求导并将式(14)和式(15)代入,可得
式中,k>0和ε>0为控制器设计参数。权值调节算法设计为

Γ是一个常值矩阵,表示神经网络的学习速率,μ>0是设计参数,则

利用不等式[8]

又由式(19),不等式(27)可以写成:

由上式可知,只要满足

对滑块位移指令 u2,根据执行机构动态特性及两个执行机构的相互关系可知

综上所述,式(15)、(31)即为系统推力矢量控制和变质量矩控制所要求的控制律,它们的计算要用到式(14)、(21),神经网络权值调节律采用式(26)。参数c1、c2及k根据设计指标都选为固定值,ε 满足式(30)。
4 仿真研究
根据理论分析结果,针对碟形飞行器某特征点进行仿真研究,其简化模型的动力学系数为:取推力矢量执行机构的传递函数为1/(0.03 s+1),偏角范围为滑块执行机构的传递函数为1/(0.06 s+1),运动范围为−0.45 m≤u2≤0.45 m。设来自碟形飞行器的俯仰角指令 ϑc是阶跃信号。
根据设计指标,其他参数分别选为ε=0.5,c1=5.8535,c2=8.372 1,k=12.097 6。比例控制分配方法中比例系数kp=0.859 5,神经网络饱和补偿器中权值调节律参数μ=0.001。跟踪阶跃俯仰角指令 ϑc的仿真结果如图2所示。
由图2可以看出,没有饱和补偿时,推力矢量执行机构和运动滑块执行机构都已经超出了饱和值。如果这时对2 执行机构强制加上约束,系统会变得不稳定。有饱和补偿时,系统同样能跟踪输入信号,但2 执行机构都没有超出饱和限制,而且基本保持了跟踪性能。
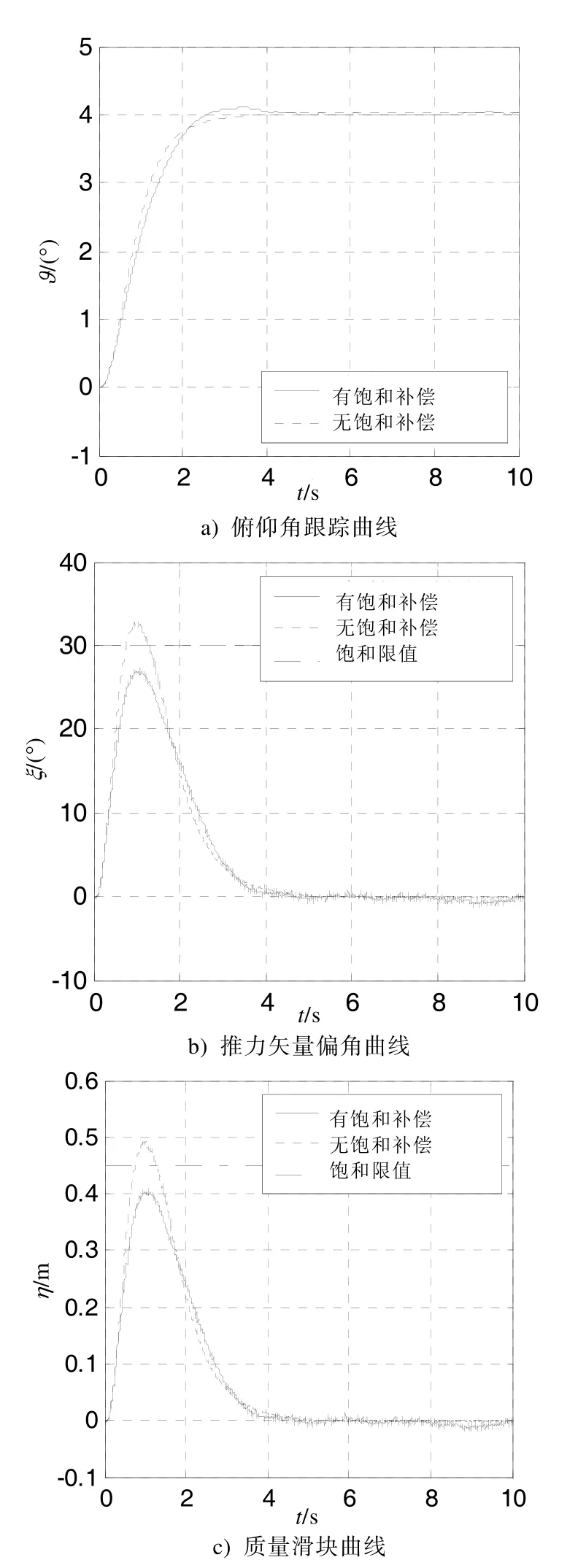
图2 有饱和补偿和无饱和补偿时系统跟踪阶跃信号曲线
5 结论
针对过驱动的碟形飞行器,在执行机构饱和非线性未知的条件下,设计了基于神经网络的滑模控制器,并采用比例控制分配方法,把双输入控制变换成单输入控制,不仅简化了控制器的设计,而且可以使控制指令在两执行机构之间按照一定的要求进行分配。通过仿真研究可以看出,两执行机构能对系统进行协调控制,并且在执行机构出现饱和时系统能进行相应的补偿,提高了系统的稳定性。
[1]吕亮.具有执行机构饱和的控制系统分析与设计[D].上海:上海交通大学,2010:1-2.
[2]HU T,LIN Z.Control Systems with Actuator Saturation:Analysis and Design[M].Boston:Birkhauser,2001:11-53.
[3]MURAD ABU-KHALAF,FRANK L LEWIS.Nearly optimal control laws for nonlinear systems with saturating actuators using a neural network HJB approach[J].Automatica,2005,41:779-791.
[4]MURAD ABU-KHALAF,FRANK L LEWIS.Nearly optimal state feedback control of constrained nonlinear systems using a neural networks HJB approach[J].Annual Reviews in Control,2004,28:239-251.
[5]SONNEVELDT L,CHU Q P,MULDER J A.Nonlinear flight control design using constrained adaptive backstepping[J].Journal of Guidance,Control,and Dynamics,2007,30(2):322-336.
[6]CHEN MOU,SAM GE SHUZHI,CHOO YOO SANG.Neural network tracking control of ocean surface vessels with input saturation[C]//Proceedings of the IEEE International Conference on Automation and Logistics.2009:85-89.
[7]FANG HUI,WANG ZHONGHUA,YANG BO,et al.The design of neural network controller of a class of nonlinear systems with actuator saturation[C]//Proceedings of the 6th World Congress on Intelligent Control and Automation.2006:949-952.
[8]GAO WENZHI,RASTKO R SELMIC.Neural network control of a class of nonlinear systems with actuator saturation[J].IEEE Transaction on Neural Networks,2006,17(1):147-156.
[9]冯国虎.碟式飞行器复合控制中的控制分配策略[J].系统仿真学报,2008,20(4):970-973.
[10]邬寅生,于德海,张友安,等.碟形飞行器复合控制方式研究[J].海军航空工程学院学报,2009,24(5):551-555.
[11]刘铁,杨侃,文建国.碟形飞行器复合控制的控制分配策略研究[J].海军航空工程学院学报,2010,25(4):434-437.
[12]张友安,邬寅生.基于比例分配的过驱动碟形飞行器滑模控制[J].北京航空航天大学学报,2010,36(10):1194-1198.
