绳锯机液压控制系统研究
2012-03-19曹立文
曹立文
(黑龙江大学机电工程学院,哈尔滨150080)
0 引 言
金刚石绳锯机是由多个执行元件组成,工程上要求绳锯机具有适应海底工作环境和切割海底石油管道复合材料的能力[1-2],其液压控制系统的设计就显得尤为重要。一个合理的液压控制系统,不但能使作业机具完成基本的运动要求,还应该满足作业机具工作中所要求的技术参数和性能指标,要求动态、静态特性好,工作效率高,同时要求系统结构简单,工作安全可靠,寿命长,以及使用维护方便。
绳锯机由于在水下工矿工作,采用液压动力更为合适。利用手动换向阀和调速阀建立了金刚石绳锯机液压控制系统,潜水员可以通过手动换向阀使径向进给马达起停或换向,通过调速阀调节径向进给马达的转速,从而可以方便地控制金刚石串珠绳的起停和径向进给速度。这套控制系统属于开环控制系统,优点是简单可靠,缺点是自动化水平较低,控制精度低,需要借助检测系统、传感器或仪表来进行调整控制参数,潜水员劳动强度大。通过金刚石绳锯机切割试验得到了合理的切割工艺参数,给液压伺服控制系统设计奠定了基础,将液压伺服阀引入液压控制系统,建立金刚石绳锯机径向进给速度液压闭环控制系统,建立液压伺服阀控速度控制系统模型。
1 绳锯机手动液压控制系统
1.1 手动液压控制系统的组成
金刚石绳锯机手动液压控制系统包括水上液压源和水下液压控制油路系统。液压源系统分为液压源油路系统和电气控制系统两部分。液压控制油路系统包括液压控制阀、液压集成块与连接管线。
1.2 液压源油路系统
液压油源见图1,是金刚石绳锯机的动力源。它将电能转化为绳锯机所需要的液压能源,专门设计的液压系统动力源可提供压力为20MPa,最大流量为90L/min。

图1 液压源Fig.1 Hydraulic source
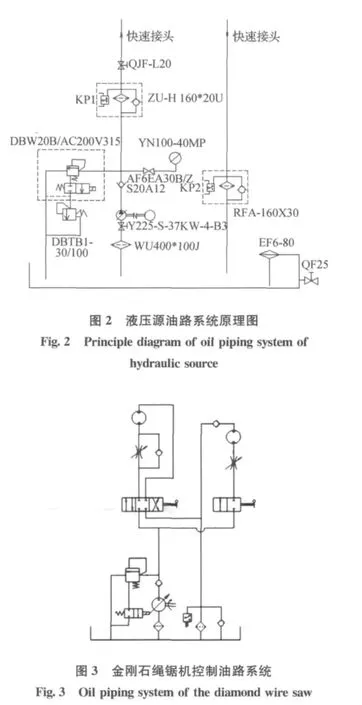
液压源油路系统原理图见图2,主要有油箱、三相交流电机、变量泵、电磁溢流阀、远程调压阀、油压指示表、滤油器、蜂鸣报警器和快速接头等组成。
1.3 液压控制油路系统
液压控制油路系统包括液压控制阀、液压集成块与连接管线。控制调节阀均采用板式连接形式与液压集成块连接。绳锯机控制油路系统见图3,包括进给液压马达控制油路和驱动液压马达控制油路。进给液压马达控制油路由三位四通手动换向阀和单向节流截止阀组成,主要完成进给液压马达的正反转和调速。驱动液压马达控制油路由开关阀和节流截止阀组成,主要完成驱动马达的起停和调速。控制阀和液压集成块实物图见图4。
2 液压伺服控制系统的研究
为了提高金刚石绳锯机的自动化程度和控制性能指标,降低操作水平,采用液压伺服控制系统来实现。金刚石绳锯机完成切割作业时,严格控制绳锯机的径向进给速度是保证合理的切割工艺参数的首要条件。针对金刚石绳锯机径向进给速度的控制进行了液压伺服阀控系统的研究。
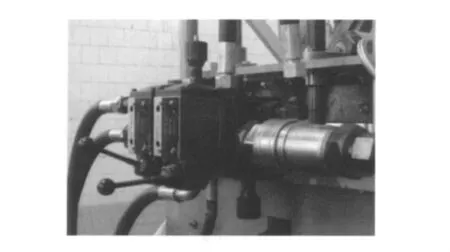
图4 液压控制阀和集成块实物图Fig.4 Hydraulic control valve and integrated lump of hydraulic system
2.1 液压伺服阀控速度系统的工作原理
金刚石绳锯机液压伺服阀控速度液压系统原理框图见图5,用于闭环控制径向进给马达的速度和方向,它由柱塞泵、溢流阀、液压伺服阀、径向进给马达和转速传感器等组成,系统采用进油口节流调速。

图5 液压伺服阀控速度控制原理图Fig.5 Principle diagram of velocity control in hydraulic servo-valve
2.2 液压伺服阀控速度系统模型建立
2.2.1 零开口四边圆柱滑阀的静态特性
2.2.1.1 滑阀的压力—流量方程
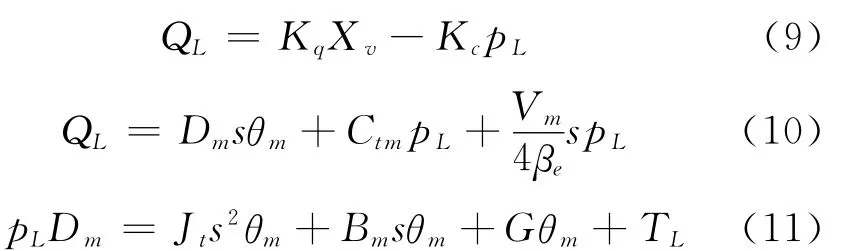
阀的节流窗口为锐边,油源压力恒定,油液是理想液体。如图6所示,当阀芯有一位移xv时,阀口打开,油液由油源经节流口1进入负载通道,而由负载流回的油液经节流口3回油。
滑阀的流量方程为:

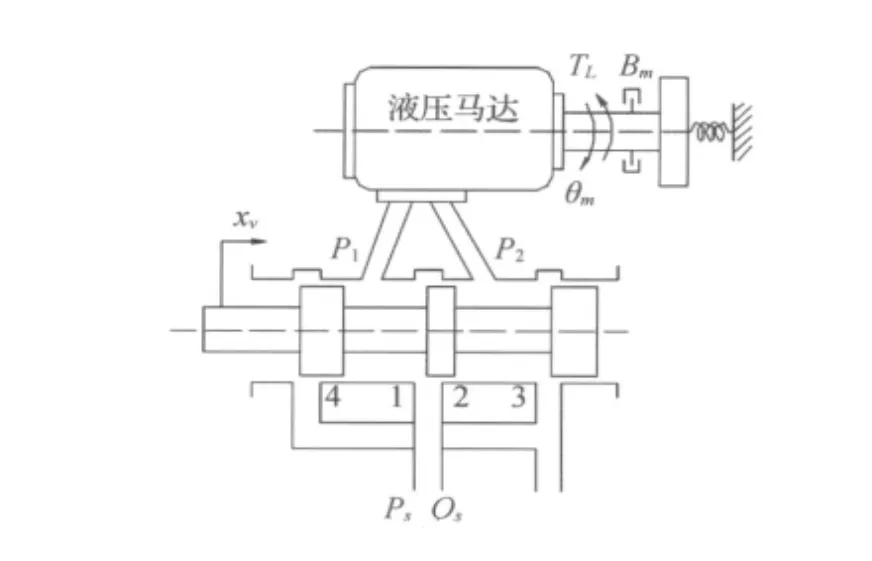
图6 阀控液压马达原理图Fig.6 Principle diagram of valve-control hydraulic motor
式中QL为负载流量 (m3/s);Qs为供油流量(m3/s);Q1为伺服阀进口流量(m3/s);Q3为伺服阀出口流量 (m3/s);xv为四通阀阀芯的位移(m);w为面积梯度,w=πd(m);Cd为流量系数;ρ为液压油密度 (kg/m3);ps为伺服阀供油进口压力(MPa);pL为负载压力(MPa)。
2.2.1.2 阀的线性化分析和阀的系数
采用线性理论进行动态分析时,对压力-流量方程线性化。方程在某一特定工作点的一般表示式为:QLA=f(xvA,pLA),把该式在某一特定工作点附近展成台劳级数:

如果把工作范围限制在工作点附近,则高阶无穷小可以忽略,得到压力-流量的线性化方程为:

阀的3个系数分别为流量增益、流量-压力系数和压力增益。
流量增益为:

流量-压力系数为:

压力增益为:

2.2.2 液压马达流量连续性方程
流量连续性方程为:

式中θm为液压马达轴的转角 (rad);Dm为液压马达的理论排量(m3/rad);Ctm为液压马达的总泄漏系数 (m5/(N·s));Vm为马达腔和阀间的连接管道总容积 (m3);βe为系统综合弹性模量(N/m3)。
2.2.3 液压马达和负载力矩平衡方程
液压马达的输出力矩和负载力矩的平衡方程为:

式中Jt为液压马达和负载折算到马达轴的总惯量(m·N·s2);Bm为液压马达和负载的粘性阻尼系数(m·N·s/rad);G为负载的扭转弹簧刚度(N·m/rad);TL为作用于马达轴的任意外负载扭矩(N·m)。
2.2.4 阀控液压马达的传递函数
将阀控液压马达的3个基本方程式进行拉普拉斯变换得:
求得阀芯输入位移和外负载力矩同时作用时液压马达轴的转角为:

式中Kce为总流量-压力系数,Kce=Kc+Ctm。
在特定条件下往往可以忽略一些因素,使传递函数简化,求出与实际系统对应的传递函数。对于本系统没有弹簧负载。当上式可简化为:
液压马达轴的转角对阀位移的传递函数为:

2.3 液压伺服阀控速度系统模型参数的计算
1)液压伺服系统设计要求和给定参数如下:
锯弓板框架的质量m=150kg
锯弓板框架最大摩擦力Ff=300N
最大切削力Fq=600N
锯弓板框架最大行程l=800mm
锯弓板框架最大工作速度vmax=25mm/min
锯弓板框架最大加速度a=1m/s2
液压马达转速误差er<1r/min
频带宽度f-3dB>10Hz
2)供油压力的选择。选取供油压力ps=6MPa。
3)按最大负载力矩确定液压马达的技术参数和空载流量。锯弓板框架质量折算到液压马达轴的转动惯量为:
丝杠质量轴折算到马达轴上的转动惯量为:

取马达轴转动惯量J3=150×10-6(kg·m2),折算到液压马达轴上总等效惯量为:

液压马达轴角加速度为:

液压马达轴上惯性力矩为:

负载产生的液压马达负载力矩为:
液压马达总驱动力矩为:


液压马达的每转排量为:

液压马达最大转速为:

负载流量为:

负载压力为:

4)确定伺服阀规格。考虑泄漏量影响,将负载流量QL增大15%。

此时伺服阀压降为:

查选择伺服阀规格时的使用列线表 (阀压降为70×105Pa时),额定流量为25L/min可以满足要求。阀额定电流为In=30×10-3A。
5)伺服阀的传递函数。伺服阀的固有频率ωn=600rad/s,阻尼比ξn=0.5,额定流量Qn=25 L/min,在供油压力为ps=6MPa时,空载流量为:

阀的额定流量增益为:

所以,伺服阀传递函数为:

6)液压动力元件马达传递函数。
液压固有频率为:


液压阻尼比为:

液压伺服马达和负载的传递函数为:

7)速度传感器增益。速度传感器在最大转速时输出电压为10V,速度传感器增益为:

8)放大器增益Ke。利用±100mV控制电压产生±30mA电流,放大系数为:

9)液压伺服系统的方框图。根据以上的传递函数,可画出绳锯机锯弓板框架进给液压伺服系统的方框图,见图7。
2.4 液压伺服阀控速度系统特性仿真和分析
运用MATLAB工具箱中提供的系统分析和设计的交互式工具,来分析系统的稳定性[3-4]。
液压伺服阀控系统的开环传递函数为:

液压伺服系统的开环波德图见图8,因对数幅频裕度和对数相位裕度都为负数,系统是不稳定的。
为了使系统稳定,在控制器中加积分环节和比例校正环节后系统的波德图见图9。对数幅频裕度和对数相位裕度都为正数,显然系统是稳定的。
液压伺服阀控系统校正后的开环传递函数为:

从稳态精度上,未校正前的系统对于给定阶跃输入是一个0型系统,它是有差系统;未校正前系统对于单纯扰动输入也是个0型系统。加积分环节后的校正系统,在干扰环节前加上了一个积分环节,这样无论对于单纯的给定输入还是单纯的干扰输入,系统便成了一个I型系统,对于阶跃给定输入和阶跃干扰都变成了无差系统,校正后的系统从稳态精度上大大提高。
从动态特性指标上,校正后系统的仿真模型见图10,校正后系统单位阶跃响应曲线见图11,从图上分析可知,再加上适当的比例积分环节后,速度阶跃响应超调量很小,且响应时间<0.04s,动态特性指标满足金刚石绳锯机串珠绳径向进给速度要求。
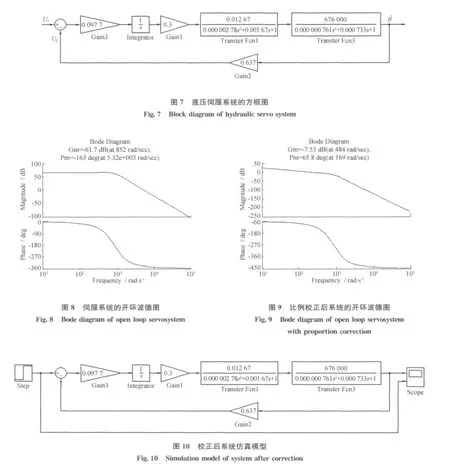
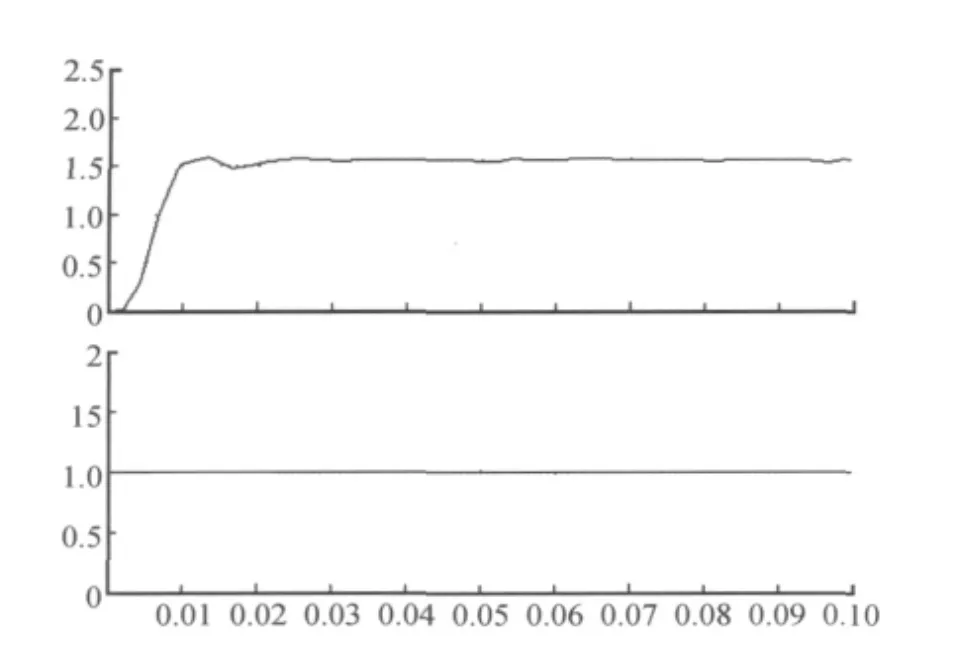
图11 校正后系统单位阶跃响应曲线Fig.11 Step response diagram after correction
3 结 论
介绍了金刚石绳锯机手动液压控制系统的组成和工作原理,分析了液压源和液压控制油路系统的工作过程和操作使用方法。为了提高控制系统的自动化水平和控制精度将液压伺服阀引入液压控制系统,建立了金刚石绳锯机径向进给速度液压闭环控制系统。阐明了金刚石绳锯机液压伺服阀控系统的工作原理,在分析零开口四边圆柱滑阀的静态特性、液压马达流量连续性方程、液压马达和负载力矩平衡方程的基础上建立了液压伺服阀控速度控制系统模型,并进行了液压伺服系统频率特性仿真和分析。液压伺服系统仿真结果表明满足设计要求。
[1]王海波,孟庆鑫,王 拮.海洋废弃平台桩基拆除绳锯机的研发 [J].机械设计与制造,2010, (10):116-118.
[2]曹立文,张海兵,刘国华,等.单层输油管道切割试验[J].工具技术,2010,44(7):30-33.
[3]徐志扬.基于MATLAB的液压伺服系统的仿真研究[J].液压与气动,2011,(9):1-3.
[4]董甲东,谷立臣.带式输送机纠偏装置液压伺服系统仿真设计[J].起重运输机械,2010,(11):17-19.
