HEV再生制动时电池快速充电模糊控制策略
2012-03-13付主木高爱云费树岷
付主木 王 斌 高爱云 费树岷
(1 河南科技大学电子信息工程学院,洛阳471003)
(2 山东大学控制科学与工程学院,济南250061)
(3 河南科技大学车辆与动力工程学院,洛阳471003)
(4 东南大学自动化学院,南京210096)
再生制动是混合动力汽车(HEV)研究的重要内容之一[1-2].为进一步提高HEV 制动能量回馈效率,减少燃料油耗,在保证蓄电池安全的基础上,实现再生制动时电池快速充电极为关键.目前,国内外在电池能量管理系统和快速充电方面已经取得了一些突破性进展[3-4].张金等[5]通过对镍镉电池剩余容量分级,提出了基于等压差时间差的镍镉电池脉冲充电算法,该算法可推广至外接充电式HEV 快速充电.杨阳等[6]通过电池测试和数据拟合,在脉冲充电法基础上,提出了HEV 再生制动时NIMH 电池分阶段恒流充电策略,该方法兼顾了电池温升控制和快速充电的要求,但假设过于理想,并不适用于HEV 在城市路况下的再生制动充电.Plett[7]通过卡尔曼滤波法估计电池容量来确定充电电流大小,Chiasson 等[8]采用电池开路电压模型和电荷积分的方法来预估电池的容量,但这些方法均需要在线检测许多变量,无疑会带来一定的累积误差.目前国内外在电池快速充电方面取得的许多研究成果中,大多仅限于对电池配方的研究,专门适合于城市路况下HEV 制动或与再生制动相结合的快速充电方案尚不多见.
本文在国内外研究的基础上,根据马斯定律,结合HEV 再生制动的特性[9-10],通过对电池热交换模型和开路电压模型的分析,设计出一种基于模糊控制的HEV 再生制动时电池快速充电策略,并在Matlab/Simulink 下进行仿真及对比分析.
1 HEV 再生制动时电池快速充电模型
1.1 电池的热交换模型
电池在快速充电时,温度升高过快是影响电池充电安全的主要因素之一,因此需通过建立电池的热交换模型控制其在安全的范围内.忽略过充电副反应产生的热量,电池的热交换模型主要由内阻损耗发热、电池组热传导和空气对流散热等因素决定[11].
电池表面温度Tbat与电池充电的初始温度、电池外壳比热系数和热量传递相关,其计算公式为

式中,T0为电池充电初始温度;Qw为电池充电所产生的热量;Qout为电池组通过箱体的散热量;mb为电池组质量;Cb为电池比热系数.
根据能量守恒定律,电池充电产生的热量等于内阻上所消耗的电能加上电池化学反应产生的热量.电池充电过程生成的总热量Qw为

式中,Ib为实际充电电流;Rb为电池充电时的内阻.
电池组通过箱体的散热量Qout可根据空气温度和电池外壳温度计算出,即

式中,Tair为空气温度;Rth为电池的有效热阻.
电池的有效热阻Rth与电池组箱散热面积、外壳材料和空气对流快慢有关,其计算公式为

式中,A 为电池组箱的散热面积;λ 为电池外壳导热系数;h 为空气对流系数.
此外,当电池温度大于最大限值时,需要用风扇进行强制通风冷却.空气对流系数由下式确定:
1.2 电池开路电压-内阻模型
蓄电池的电流、电压和充电效率采用电池开路电压-内阻模型计算.由于电池的充电过程是一个受多因素影响的复杂非线性过程,热动力效应或量子效应的影响会导致不同载荷下电压变化率的变化,而理论模型很难模拟这种效应,所以电池模型大多是基于试验数据的经验模型或半经验模型[12].考虑到温度对电池电压及内阻的影响,根据电池当前的荷电状态(SOC)值和温度,建立理想电压源与电池内阻相串联的电池模型,等效电路如图1所示.
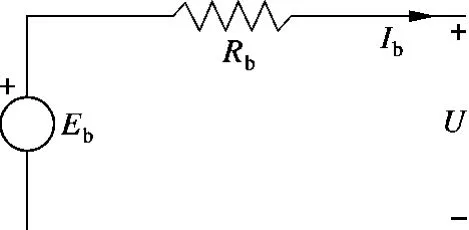
图1 电池模型的等效电路
假设充电电流没有波动,不考虑电池回路等效电感,有

式中,U 为充电电压;Eb为电池开路电压;Rb=f(Tbat,SOC)为充电内阻;在充电过程中,Ib值为负.
根据功率Pb与电压、电流的关系,有

结合式(6)、(7),并考虑到充电电流为负,则电池的充电效率ηb可估计为

充电过程中,充电电流与电池SOC 值密切相关.由电池SOC 的定义[8],有
式中,kTb为温度系数,室温为25 ℃时,kTb=1;Ct为电池容量.
所建电池热交换模型和电池开路电压-内阻模型反映了电池充电电流、充电电压、温度、充电效率间的关系,而电池充电电流与电池SOC 值密切相关.因此,设计模糊控制器时选取电池SOC 值和电池表面温度Tbat作为输入变量,最大可接受充电电流Ife作为输出变量.
2 充电策略设计
2.1 实际充电电流计算
由于HEV 在城市路况下再生制动时间一般为30 s 左右,因此须采用快速充电策略.受电池容量和电池本身特性的影响,快速充电时要考虑电池可接受的最大充电电流.如果电机输出的制动回馈电流过大,会导致电池充放电效率降低,从而缩短电池使用寿命,进一步会造成电池永久性损坏.因此,应首先确定电池最大可接受充电电流.由马斯定律,有

式中,I 为t 时刻的最大可充电电流;I0为t =0 时选取的初始充电电流,由电池本身特性确定;a 为充电电流接受比;Cr为初始时刻剩余容量.
本文研究的HEV 蓄电池采用120 节1.2 V 的NIMH 电池,容量为6.5 A·h,理想开路电压为144 V,最大充电电压为190 V.当SOC =0.4 时,选取I0=80 A.根据马斯定律,在10 min 内将电池充电至SOC =0.8,计算可得a≈0.008 5,最大充电电流曲线和SOC 上升曲线分别如图2(a)和(b)所示.
图2(a)中曲线与坐标轴包围区域为可接受充电区,曲线上方为出气区.如果电池长时间工作在出气区,电池温升加快,会损坏电池,严重时会导致电池爆裂,所以充电时最大电流必须设定在可接受充电区内.根据马斯定律,针对不同SOC 初始值,理论上可以确定不同时刻最大初始可充电电流.但是,在实际HEV 再生制动时,因电池被安放于狭小的空间内,并且受各种非线性因素的影响,应考虑电池充电过程中发热的影响.电池发热具有滞后性,即在电池充电结束后温度还会略微上升.为保证安全,取安全系数为1.3,有
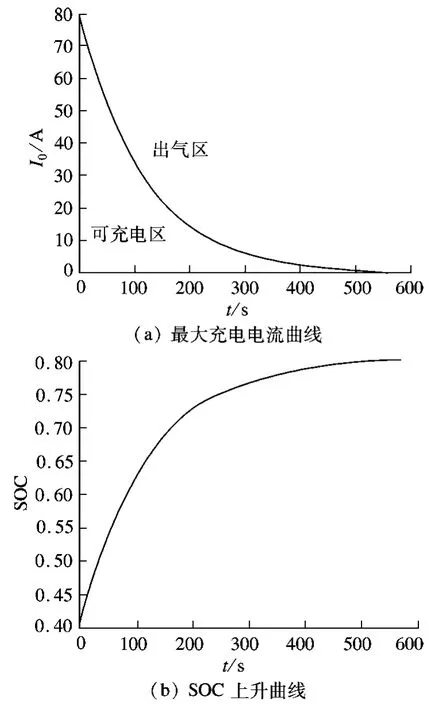
图2 基于马斯定律的最大充电电流和SOC 上升曲线

式中,Iac为实际最大可充电电流.对式(12)计算结果取整,选定最大初始电流为62 A.
HEV 在城市路况下再生制动时,充电过程受路况、驾驶员驾驶意图等非线性因素的影响,其电池充电模型也是非线性、不精确的,而模糊控制比较适用于这种情况.因此,本文将模糊控制技术与马斯定律结合应用于HEV 再生制动时电池快速充电,即根据电池的最大初始充电电流和相关参数,通过模糊控制器来预估最大可充电电流Ife.
在充电过程中,充电电流的大小还与再生制动时的功率有关,假设电机吸收全部再生制动功率,根据制动功率大小亦可确定一个理论充电电流Ith.

式中,Pch为再生制动功率;ηd为再生制动功率与制动功率的比值,ηd<1;m 为汽车总质量;v(t)与v(t-1)分别表示汽车在时刻t 与t-1 时的速度;ηch为充电平均效率.
对Ith和Ife取最小值,得实际充电电流Ib,即

2.2 模糊控制器设计
根据上述分析,设计两输入一输出电池快速充电模糊控制器.推理方法选用Mamdani 推理,按模糊控制器设计规则,设计语言值个数、定义论域、设计隶属函数、制定规则表及确定解模糊方法.
本文取电池荷电状态SOC 的语言值为7 个,温度Tbat的语言值为5 个,充电电流I 的语言值为9个.对应的语言值分别为VSS(非常小)、SS(小小)、SM(中小)、SB(大小)、S(小)、M(中)、B(大)、BS(小大)、BM(中大)、BB(大大)、VBB(非常大).
为了防止电池出现过充电现象,蓄电池的SOC 值应该控制在0.8 以下,电流SOC 值的论域为0~0.8;电池的温度不宜过高,充电时最高温度控制在40 ℃左右,考虑充电后温升,故温度论域为0~45 ℃.为使得所设计的模糊控制器更具有推广性,将论域单位化,取电池SOC 值量化因子KSOC=1.25,温度量化因子KT=1/45,输出电流量化因子KI=1/62.
输入、输出变量的隶属函数设计为左右两边为开口梯形,中间为三角形.电池的SOC 最低值应控制在0.2 以上,电池SOC 值过大时,禁止充电,设计各变量的隶属函数如图3所示.

图3 输入和输出变量的隶属函数
隶属函数设计完成后,需要根据经验设计模糊控制规则,并根据输入输出变量观测曲面对规则进行修改.此外,模糊控制规则表还需要根据仿真结果作进一步细微修改,最后确定的模糊控制规则如表1所示.

表1 模糊控制规则表
输入与输出界面关系图如图4所示.由图可知,电池温度越低,SOC 值越小,则可接受充电电流越大;相反,温度越高,SOC 值越大,则可接受充电电流越小,直至为零.
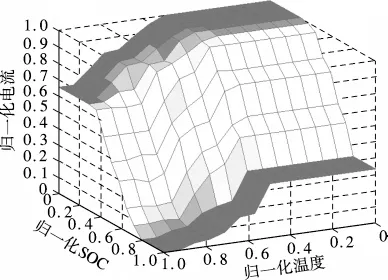
图4 输入输出变量关系图
本文结合实际经验,并通过仿真计算,选取的解模糊方法为最大平均值法(MOM).最大平均值法仅考虑输出有效作用隶属函数最大的成分中心处的高度,如果有多个最大值,则解模糊公式为

式中,Z0为模糊控制器输出量;Zm为输出隶属函数为最大值时对应的第m 个论域元素;M 为最大值的个数.
3 仿真及对比分析
为便于对比分析,本文分别对目前国内较成熟的限流充电控制策略和所设计的快速充电模糊控制策略进行仿真.假设在理想城市路况下,HEV 完成一次完整的高附着路面制动过程中后期液压制动与回收的液压制动能量一致,其电能回收率可按下式计算:

式中,ε 为电能回收率;I(t)为t 时刻充电电流;R(t)为t 时刻电池内阻;ΔEb为一次完整再生制动电池储存的电量;v0为汽车制动初始时刻速度.
搭建的HEV 再生制动时快速充电模糊控制仿真模型如图5所示.其中,图5(a)为实际充电电流计算子模型(即图5(b)中的中央计算模块),具体包括模糊控制器、相应的量化因子和根据实际功率确定的理论电流计算模块.图5(b)中温度计算模块与电池热交换模型对应,电池SOC 估算模块与开路电压-内阻模型对应,动态参数与电池初始充电时的SOC 值一致.

图5 电池快速充电仿真模型
假设HEV 的总质量为1 350 kg,再生制动时,充电初始温度为25 ℃,电池SOC 值为0.4 开始充电,初始车速为100 km/h,再生制动时间为30 s,最后转为液压制动,整车制动前动能为520.833 kJ.当汽车初始制动功率很大时,制动开始时制动加速度a=-1 m/s2,再生制动初始充电电流为62 A,并且在0~30 s 内逐渐减少.采用本文设计的快速充电模糊控制策略与限流充电控制策略的仿真结果对比如图6所示.
由图6(a)、(b)可知,采用本文所设计的模糊控制策略与限流法相比,在充电前期,充电电流较大,相应的充电温升略快(由文献[6]可知,电池在此温度范围内是安全的),充电效率显著提高;在充电后期,由式(13)~(15)可知,电池充电电流随HEV 车速降低而变小,两者充电电流大小相等.由图6(c)可知,采用模糊控制策略在充电前期SOC值变化率明显大于限流充电SOC 值变化率,充电后期(19 s 后),2 条曲线的斜率一致,表明SOC 变化率一致,证明了所设计模糊控制策略的有效性和合理性.
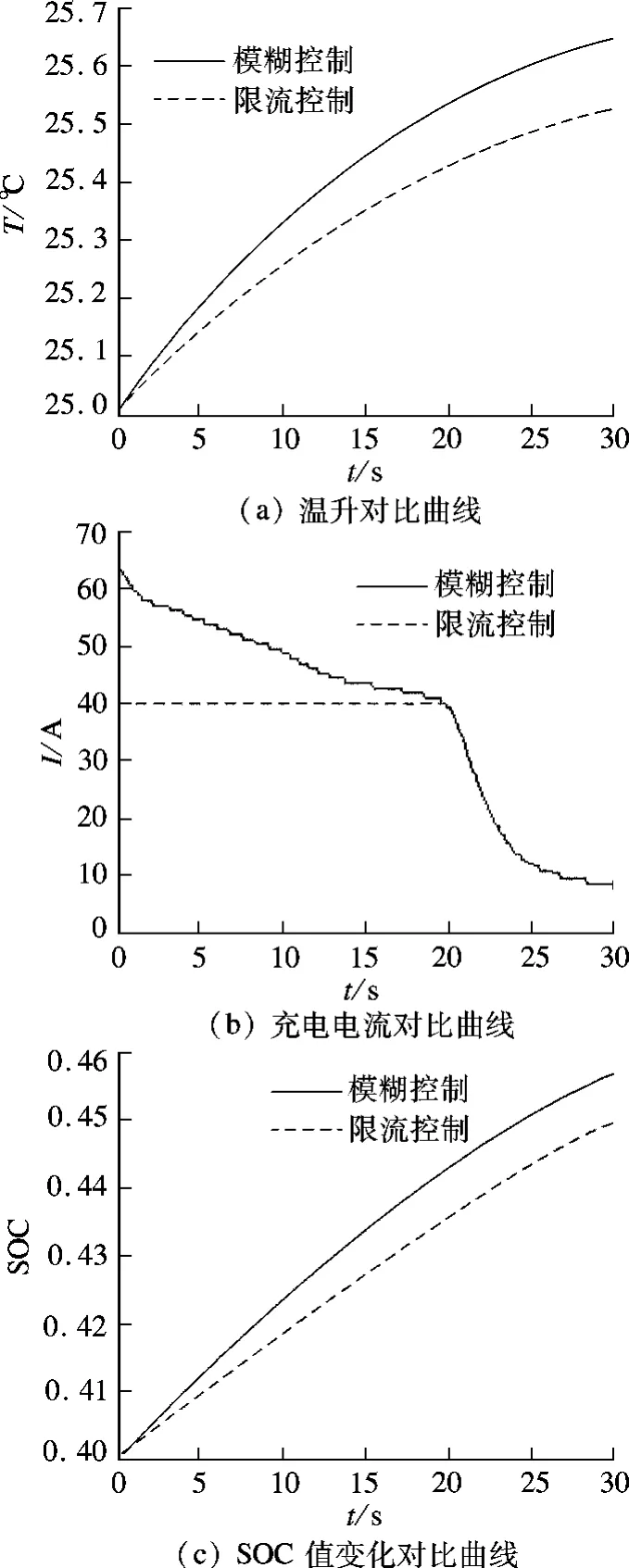
图6 快速充电模糊控制策略与限流充电控制策略的仿真对比
根据式(17),可分别计算出采用模糊控制策略和限流控制充电的电能回收率.其中,采用快速充电模糊控制策略回收的总电能为219.024 kJ,电能回收率为42.05%;采用限流控制回收的总电能为175.219 kJ,电能回收率为33.64%.通过对比可看出,采用模糊控制策略的电能回收率比限流充电的回收率高8.41%,证明了所设计模糊控制策略的高效性.
4 结论
1)建立了电池开路电压-内阻模型与充电效率间的数学关系,设计了HEV 再生制动时电池快速充电模糊控制算法,充分考虑电池温升作用,保证了电池快速充电的安全性.
2)结合HEV 再生制动特性,设计模糊控制器时使其论域单位化,所设计的快速充电模糊控制算法适用于同类HEV 或纯电动汽车再生制动时电池快速充电.
3)仿真结果表明,该算法适用于HEV 城市路况下制动快速充电,与限流充电控制策略比较,快速充电模糊控制策略的电能回收率增加了8.41%,节能效果明显.
HEV 再生制动时电池快速充电模糊控制策略的研究提高了再生制动电能回收率.但由于HEV实际工况的复杂性与多样性,因而在实际应用中,如何将电池快速充电模糊控制算法与其他智能控制方法结合,实现针对实际扰动的在线控制将是后续研究工作的重点.
References)
[1]Xiao Wenyong,Wang Feng,Zhuo Bin.Regenerative braking algorithm for an ISG HEV based on regenerative torque optimization[J].Journal of Shanghai Jiaotong University,2008,13(2):1-8.
[2]Adhikari S,Halgamuge S K,Watson H.An online power-balancing strategy for a parallel hybrid electric vehicle assisted by an integrated starter generator [J].IEEE Transactions on Vehicular Technology,2010,59(6):2689-2699.
[3]Panom P,Phaophak S,Noppadol K.Low cost RISC implementation of intelligent ultra fast charger for Ni-Cd battery [J].Energy Conversion and Management,2008,49(2):185-192.
[4]Perez L V,Bossio G R,Moitre D,et al.Optimization of power management in a hybrid electric vehicle using dynamic programming [J].Mathematics and Computers in Simulation,2006,73(4):244-254.
[5]张金,王伯雄,罗秀芝.基于等压差时间差的镍镉电池快速超快速充电算法[J].清华大学学报:自然科学版,2010,50(2):211-214.
Zhang Jin,Wang Boxiong,Luo Xiuzhi.Fast and ultrafast charging algorithm for nickel-cadmium batteries based on time differences with equal charge voltage differences[J].Journal of Tsinghua University:Science and Technology,2010,50(2):211-214.(in Chinese)
[6]杨阳,林志煌,秦大同,等.HEV 再生制动时NIMH电池快速充电策略与仿真[J].重庆大学学报:自然科学版,2007,30(3):1-5.
Yang Yang,Lin Zhihuang,Qin Datong,et al.Control strategy and simulation study on NiMH battery quick charging for regenerative braking of HEV[J].Journal of Chongqing University:Natural Science Edition,2007,30(3):1-5.(in Chinese)
[7]Plett G L.Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs—Part 1.background [J].Journal of Power Sources,2004,134(2):252-261.
[8]Chiasson J,Vairamohan B.Estimating the state of charge of a battery [J].IEEE Transactions on Control Systems Technology,2005,13(3):465-470.
[9]Somayajula D,Meintz A,Ferdowsi M.Designing efficient hybrid electric vehicles[J].IEEE Vehicular Technology Magazine,2009,4(2):65-72.
[10]Yang M J,Jhou H L,Ma B Y,et al.A cost-effective method of electric brake with energy regeneration for electric vehicles[J].IEEE Transactions on Industrial Electronics,2009,56(6):2203-2212.
[11]杨亚联,张昕,李隆键,等.基于CFD 的混合动力车用镍氢电池散热系统研究[J].汽车工程,2009,31(3):214-218.
Yang Yalian,Zhang Xin,Li Longjian,et al.A study on the cooling system of Ni/MH batteries for hybrid electric vehicle based on CFD analysis[J].Automotive Engineering,2009,31(3):214-218.(in Chinese)
[12]Kim T,Qiao Wei.A hybrid battery model capable of capturing dynamic circuit characteristics and nonlinear capacity effects [J].IEEE Transactions on Energy Conversion,2011,26(4):1172-1180.
