医用机械手设计构想
2012-02-20毋虎城
毋虎城,郭 伟
(河南工程技术学校,河南 焦作 454002)
机械手是工业生产的必然产物,它是一种模仿人体上肢部分功能,按照控制程序要求输送工件或握持工具进行操作的应用设备。它对降低劳动强度,推动工业生产和社会生产的发展有着重要的作用,因而具有强大的生命力,深受人们的重视和欢迎。实践证明,机械手不仅在工业上可以代替人手劳动,改善劳动条件,提高生产率,而且在医疗领域也得到了发展,可改善医护人员的工作条件,具有适用性和安全性。医用机械手具有快速、高效等特点。机械手采用液压驱动和控制,可实现手臂的伸缩、回旋、上下移动,手腕的旋转和手部的抓放动作。
医用机械手对需要手术医治的患者,可进行X移动、Y移动、Z移动、X转动、Y转动、Z转动6个自由度的组合。
1 医用机械手的组成
1.1 工作原理
医用机械手主要由执行机构、传动机构、驱动机构和操作机构等组成,采用液压传动方式来实现执行机构的相应动作。在各个时间段,按预先规定程序进行医疗操作,并达到不同速度和精确动作的要求,同时,利用换向阀对执行机构发出指令,从而使执行机构——机械手夹持各类医疗器械到达指定空间位置。
1.2 结构
医用机械手的结构如图1所示。
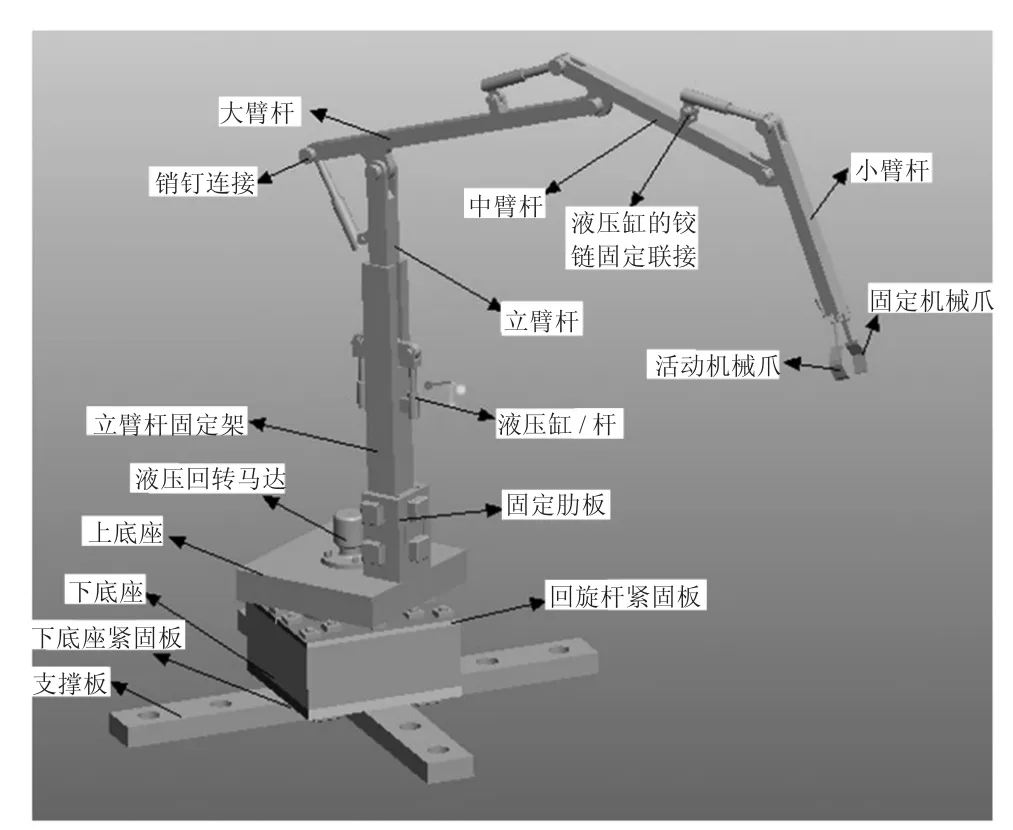
图1 医用机械手结构示意图
(1)执行机构。医用机械手执行机构,主要由手部和运动机构组成。手部是用来抓持医疗器械(或工具)的部件,根据被抓持的物件的形状、尺寸、净质量、材料和作业要求不同,有多种结构形式,如夹持式,托持式和吸附式。
(2)传动机构。传动机构使手部完成各种转动(摆动)、移动或复合运动,从而实现编制程序规定的动作,改变被夹持物体的位置和姿态。主要由臂杆、液压缸、液压马达、液压管件等组成。传动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活度越大,通用性好,其结构也越复杂。一般专用机械手有2~3个自由度。
(3)驱动机构。医用机械手采用液压驱动方式,如图2所示。使用液压泵作为动力源,用液压缸和液压马达作为系统动力的执行装置,同时用换向阀控制液压缸和液压马达的启停,实现规定的定位目标。由于液压装置工作比较平稳,在相同体积下,液压装置能比电气装置产生出更大的动力。在同等功率下液压装置的体积小,质量小,其功率大,结构紧凑。
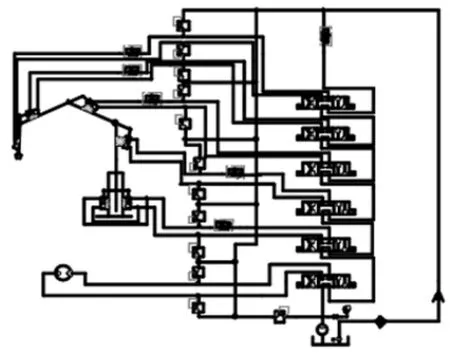
图2 液压系统示意图
(4)操作机构。操作机构由液压控制阀来控制。机械手靠液压阀操作实现动作的速度控制、方向控制,以及手部力度的控制,更容易实现动作速度的无极调速,满足了同一个医用机械手可以进行不同医学诊治的多种治疗需求。
1.3 机械手的优点
(1)控制和调节简单、方便、省力,易实现自动化控制和过载保护。
(2)可无间隙传动,运动平稳,无噪音。
(3)传动介质是油液,对液压元件有润滑作用,使用寿命长。
(4)液压元件实现标准化、系列化、通用化,便于设计、制造和推广使用,价格便宜,成本低。
2 医用机械手的先进性
医用机械手的积极作用,日益为人们所认识:
(1)能代替医护人员的部分操作。
(2)能按照各种医学治疗的不同要求,特别是在常规手术中,遵循一定的程序,在特定时间和位置上,可完成医疗工具的传递和收取。
(3)其应用在一定程度上降低了医护人员的劳动强度,同时,逐步实现医学治疗的机械化、程序化和自动化。因而,很多国家都投入大量的人力物力来研究和应用机械手。
医用机械手能持久、耐劳,不仅可以把医疗人员从繁重、单调机械的工作中解放出来,而且能扩大和延伸人的作用,提高医护治疗的安全性和可靠性,同时,又可以避免人为受外界影响的操作失误,具有高精确性和高稳定性。
3 医用机械手的不足之处
对人体实施手术治疗中,可变因素较多并且复杂。医用机械手不允许出现操作错误,否则,会给患者造成心理和身体的伤害:
(1)手术过程中会受到患者体型胖瘦、个子高低、出血量、手术人员经验等因素影响。
(2)医用机械手在手术中较为笨拙,施加在机械手上的压力可使数据发生变化,同时存在固定装置和制动器的位移误差。
(3)灵活机动性不强,不能根据手术进展的实际情况,随时进行处置方案的调整优化,需人工中止并变换程序方可继续。
4 结束语
为进一步完善柔性功能,对典型常规手术,编制不同控制程序和可变参数,使同一类手术能满足各种体形和身体素质的不同人群,就扩展了机械手在医院手术和治疗的实际应用范围,适应对各种典型病症的需求,实现医疗工作上柔性治疗的要求,更体现医用机械手操作的标准规范、稳定高效的优越性,将会成为发展的方向,有着广泛的发展前景。
[1]陈奎生.液压与气压传动[M].武汉:武汉理工大学出版社,2008.
[2]徐永生.液压与气压传动[M].北京:机械工业出版社,2000.
[3]沈兴全,吴秀玲.液压传动与控制[M].北京:国防工业出版社,2005.
[4]张健民.工业机器人[M].北京:北京理工大学出版社,1998.
[5]张福学.机器人技术及其应用[M].北京:电子工业出版社,2000.
[6]高 微,等.机械手臂结构优化设计[J].机械设计与制造,2006,(1):67-83.
