基于激光导引头的四象限光电探测器检测电路研究
2012-02-20匡冬权
匡冬权
(总装备部驻沈阳地区军事代表室,辽宁 沈阳 11000;沈阳理工大学,辽宁 沈阳 110159)
激光制导技术的研究始于上世纪六十年代,典型的激光半主动制导武器系统主要由带激光半主动导引头的导弹(炸弹、炮弹)及发射平台和激光目标指示器构成[1]。激光半主动制导的基本原理是通过激光器发射经编码的激光信号并照射目标,保持跟踪照射目标,装在弹上的导引头不断接收目标反射的激光信号,计算处理目标与导弹的相对位置,进而控制导弹飞行,直至精确命中目标。与雷达、红外、电视等制导方式相比,激光制导具有很高的制导精度和较强的抗干扰能力、可实现有限的发射后不管、能主动导引攻击、成本相对较低等优点;与激光驾束和及激光指令制导等遥控制导体制相比,具有发射点与照射点配置灵活,无需全程照射目标,射程不受限制等优点。因此激光半主动制导技术受到世界各先进国家的重视。
现代战争强调的就是精确打击,而制导系统是导弹的大脑,导引头是制导系统获取外界信息的必要途径,它的性能好坏直接影响到激光制导武器的打击效果。通过对本课题的研究可以对半主动激光制导导引头的组成原理有较深入的了解,并提出相应的改进方案,对提高激光制导武器的战场生存能力和打击能力有重要意义。
选用激光半主动制导体制可以使导弹的射程更远(达6 km以上),可以采用曲射弹道攻击坦克较为薄弱的顶装甲;在整个射击过程中,只需在最后8s用激光照射器照射目标,减少了照射器暴露的机会;在有其它照射器协助的情况下,可间接射击。
激光半主动寻的制导武器系统一般由弹体(如导弹、炸弹、炮弹等)、弹体的载体(如飞机、坦克、舰船等)和激光目标指示器三部分组成。当执行战斗任务时,安装有激光照射源的载体在空中或地面向攻击目标发射激光束,当安装在导弹上的导引头捕获到从目标反射回来的激光束后,就直奔目标而去并将其摧毁。
随着红外烟幕、红外诱饵弹及红外干扰机等多种干扰手段的出现与发展,传统的红外寻的制导武器逐渐失去了原有的作战威力,有时甚至根本不起作用[2]。为改变这一状况,各国均在努力改进制导武器的性能并积极探索新的制导方法。激光半主动寻的制导就是由弹外的激光束照射在目标上,并由弹上的激光寻的器利用目标反射的激光,实现对目标的跟踪和对弹的控制,从而将弹导向目标的一种精确制导方法,是一种十分重要且有较强抗干扰能力的制导体制,20世纪90年代发生的几起局部战争表明,激光半主动寻的制导武器已成为现代战场的主战武器之一。
1 课题背景和意义
在激光半主动寻的制导中,激光导引头经常使用的有双四元、单四元、三元和二元等多种形式象限探测器组件;如俄罗斯红土地末制导炮弹采用双四象限探测器。四象限探测器再配合自动驾驶仪等动力装置,可以很方便可靠的完成制导、跟踪任务。位于导引头最前端的四象限光电探测器和自动增益控制放大电路的电路设计是整个导引头设计的关键,是捕获目标、判断目标位置、分析目标状态的第一手信息的重要部分。实际工程运用中常常把四象限光电探测器和自动增益控制放大电路制作成带自动增益控制的象限光电放大器组件,封装在同一小型的金属壳体内,以提高整个导引头的光电探测系统的灵敏度和可靠性。本文主要是在分析四象限光电探测器工作原理的基础之上,利用单片机仿真。
2 导引头的工作原理及过程
2.1 制导规律
所谓制导规律,是指在制导过程中,调节弹的飞行参数所遵循的某种规律。选择的制导规律不同,控制的最终结果、所适应的使用条件、要求的弹体过载及导引头机构的复杂程度都会不同[5]。对制导规律一般有如下几个要求:(1)保证系统有足够的制导准确度;(2)导弹的整个飞行弹道,特别是攻击区内,理想弹道曲率应尽量小,保证所需的导弹过载小;(3)保证飞行的稳定性,导弹的运动对目标运动参数的变化不敏感;(4)制导设备尽可能简单。
在导弹飞行过程中,制导规律决定导弹和目标或导弹、目标和指导站之间的运动学关系。一般制导规律有以下几种:
(1)姿态追踪法制导
在采用这种制导规律时,要求弹体轴线指向目标。因此,姿态追踪的导引头所要测量的是弹轴与目标视线的夹角,只要导引头与弹体固连,其光学轴与弹体轴线一致,就能够测量这一误差角。
(2)速度追踪法制导
它要求弹的速度向量指向目标。这与姿态追踪制导不同,速度追踪导引头测量的是弹的速度向量与目标视线之间的夹角。为了测量这个角度,首先需要建立速度向量的测量基准,在弹的飞行过程中,导引头的这一测量基准轴要随弹的速度方向而变化。这通常是利用风标来实现的。速度追踪的导引头依靠万向支架与弹体相连,并由风标将其轴线稳定在弹道风的方向,及弹的空速方向。
(3)比例导引制导
在激光制导导弹和制导炮弹中,比例导引制导用得最为普遍。它要求弹的横向加速度与目标视线角速度成正比,及弹的速度向量的旋转角速度与视线角速度成比例。比例导引制导导引头的首要任务是要跟踪目标并测量出目标视线的旋转角速度。这通常是靠螺来稳定导引头的瞄准轴,并用万向支架与导弹连接来实现的。
2.2 导引头工作原理
激光制导武器的核心器件便是激光导引头。激光导引头利用目标反射的激光,实现对目标的跟踪和控制,直至导弹命中目标。
激光寻的制导是由弹外或弹上的激光束照射在目标上,弹上的激光导引头利用目标反射的激光,实现对目标的跟踪。导引头的主要功能是:接收由激光器发射经目标漫反射后的激光回波信号,并获得误差信号;按制导规律测定某参量,送入控制系统,搜索和跟踪目标。为完成这两项任务,导引头由两个主要部分组成:位标器和电子舱。它属于专业涉及面宽、系统复杂、技术密集度高的光、机、电紧密结合的弹载末端精确制导部件。
激光制导炮弹的射程一般在3~20km之间。从激光照射器的性能和对抗的角度出发,它不可能在全程内一直照射,所以必须在离目标一定距离时导引头才开始工作。因此,它属于末端制导。报道表明只要这一距离大于2km,就能有效击中目标。
2.3 半主动激光制导原理
激光制导,就是以激光为信息载体,把导弹,炮弹或炸弹引向目标而实施精确打击的先进技术。精准是激光制导武器的鲜明特点,由于激光的单色性好,光束的发散角小,敌方很难对制导系统实施有效干扰,因而它具有了其它制导方式无法匹敌的优势。所以,当激光制导武器攻击固定或活动目标时,精度一般在1m以内,命中率极高。激光制导武器甚至还可以从通气孔进入,炸毁地下目标,令敌方防不胜防。激光制导与红外,雷达,GPS等实现复合制导,则更有利于提高制导精度和应付各种复杂的战场环境,从而发挥全天候作战的优势。
激光制导方式有半主动寻的式,全主动寻的式和波束式(架束式)三种。目前激光制导武器中大都采用半主动激光制导方式,即导引头(它安装在弹上,被用来自动跟踪目标并测量弹的飞行误差)与激光照射装置分开配置于两地,前者随弹飞行,后者置于弹外。激光照射器用来指示目标,故又称激光目标指示器。导引头通过接收目标反射的激光照射器照射的激光或直接接收照射激光,引导导弹飞向目标。
半主动式激光制导。半主动式激光回波制导系统的工作过程是:激光发射机作为信号源装在地面、车船或飞机上,发射激光束为制导武器指示目标,弹上的激光导引头接收目标反射的激光信号,并跟踪目标上出现的激光光斑,引导战斗部飞向激光光斑,最终命中目标。半主动式回波制导广泛应用于各种武器的制导系统中,如激光制导炸弹、激光制导导弹、激光制导炮弹等,是所有制导武器中制导精度最高的。
全主动式激光制导。这种制导方式是将激光照射器和目标寻的器都装在弹上,由激光照射器发射激光,目标寻的器接收目标反射回的激光信号,再通过弹上控制系统将弹体引向目标。
波束式激光制导。激光波束制导又叫激光驾束制导,其工作过程是:激光照射器先捕捉并跟踪目标,给出目标所在方向的角度信息,然后经火控计算机控制弹体发射架,以最佳角度发射导弹,使它进入激光波束中(进人波束的方向要尽可能与激光束轴线的方向一致)。弹体在飞行过程中,弹上激光接收机接收到激光器直接照射到弹上的激光信号,从中处理出制导所需的误差量,即弹体轴线与激光束轴线的偏离方向和大小,并将这个误差里送入弹的控制系统,由控制系统控制弹的飞行方向和姿态,始终保持弹与激光照射光束的重合,最终将战斗部引导于目标上。此种制导方式就像让导弹骑在激光束上滑行一样,所以俗称“驾束制导”。
激光半主动制导属于寻的制导。典型的激光半主动制导武器系统主要由带激光半主动导引头的导弹(炸弹,炮弹)及发射平台和激光目标指示器构成。激光半主动制导的基本原理是:用激光器发射激光束照射目标,装于弹体上的激光接收装置则接收照射的激光信号或目标反射的激光信号,算出弹体偏高照射或反射激光束的程度,不断调整飞行轨迹,使战斗部沿着照射或反射激光前进,最终命中目标。
3 四象限光电检测电路
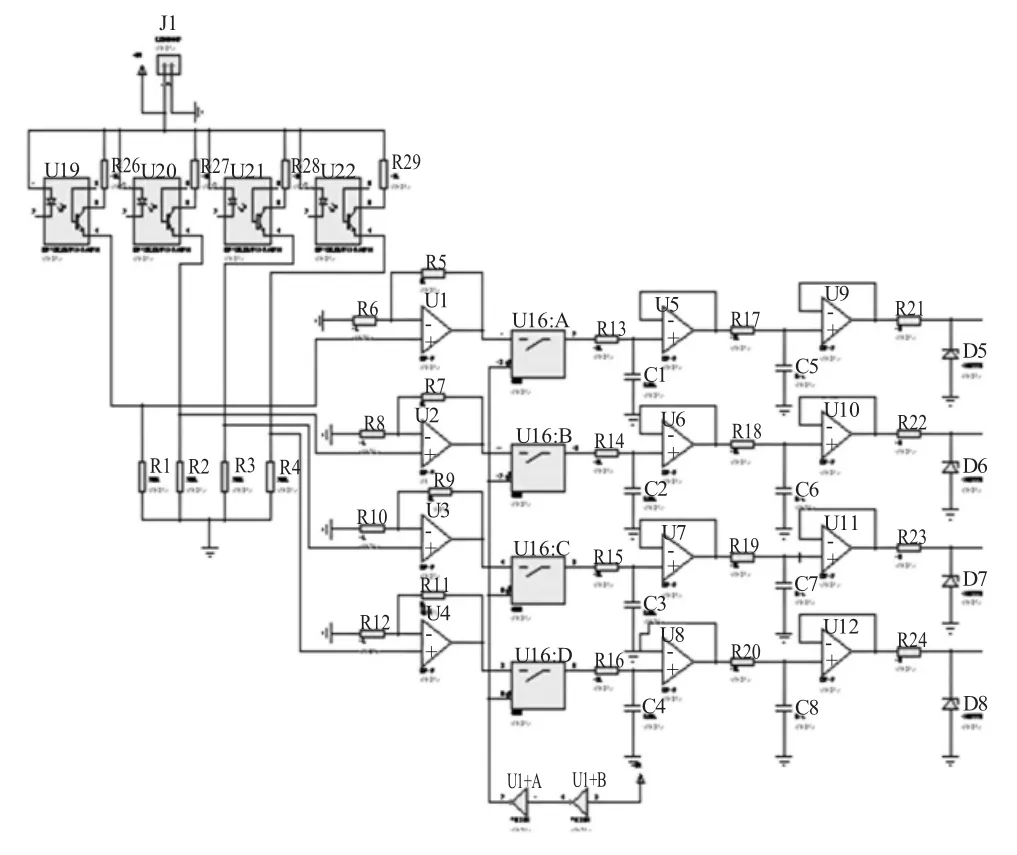
图1 四象限光电检测电路
本课题用了光电耦合器作为传感器。光电耦合器是以光为媒介传输电信号的一种电一光一电转换器件。它由发光源和受光器两部分组成。把发光源和受光器组装在同一密闭的壳体内,彼此间用透明绝缘体隔离。发光源的引脚为输入端,受光器的引脚为输出端。光电耦合器的种类较多,常见有光电二极管型、光电三极管型、光敏电阻型、光控晶闸管型、光电达林顿型、集成电路型等。模拟开关使用4066,相关器的参考信号是来自激光目标指示器的同步脉冲,是值为0、1的数字量,控制模拟开关的关闭和导通。滤波器电阻为10K,电容为0.05uF,每路检测电路的输出信号基本上是直流信号,经过后面的ADC调理电路作一定的幅度调整和电平平移后进入ADC转换为数字信号。
光学系统和四象限光电探测器都放在陀螺装置里面,四象限光电探测器装在陀螺轴上,陀螺轴和光学系统的光轴重合。目标上的激光光斑漫反射信号经过陀螺装置上的光学系统汇聚后成像在四象限光电探测器上,四象限光电探测器将激光信号转换为电信号,根据四个象限的信号输出可以得到目标像点的离轴误差。探测器输出的光电信号经过放大和调理后进入模数转换器(ADC)转换成数字量,再送入CPU中处理。CPU解算数字化后的光电信号可以得到目标(激光光斑)的方位信息,并据此控制陀螺进动,使得陀螺轴对准目标上的激光光斑,这样实现了对目标的实时动态跟踪。
在半主动激光导引头中的四象限光电探测器相关检测电路是至关重要的。为提高导引头检测电路的抗干扰能力,抑制噪声干扰,设计中,使用相关检测电路,可以大幅提高信号的信噪比。
激光目标指示器发出的激光是脉冲编码的。为提高导引头检测电路的抗干扰能力,导引头根据激光目标指示器的编码同步信号来检测激光反射光斑信号,提取出有用的激光制导编码和幅度信息,抑制背景干扰。本课题中,根据信号特点,使用相关检测技术可以大幅提高信号的信噪比。图2(a)是本课题使用的相关检测电路,前面的模拟开关是相关器,后面的RC电路是积分器。同步相关脉冲(参考信号)来自目标指示器,是与激光目标指示器信号形状和周期相同、具有一定相移的信号。探测到的激光制导脉冲信号,Vs=Af(t-t0)Vn,参考信号fr(t)=f(t)。参考信号控制模拟开关s的开和关,经过开关后的信号再经过积分器滤波 (如图3),得到的直流信号就是激光脉冲信号的幅度,而噪声干扰被大幅度的衰减了。图2(b)是相关器的数学模型,模拟开关可以看作是一个乘法器,参考信号Vr是值为0和1的脉冲,经过开关后的信号V's是输入信号Vs和参考信号Vr的乘积
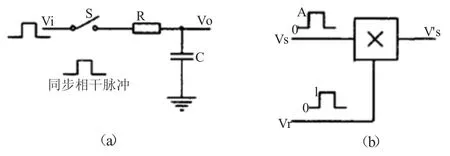
图2 相关检测

图3 滤波器(积分器)
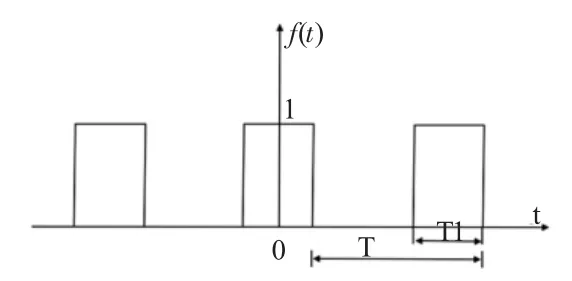
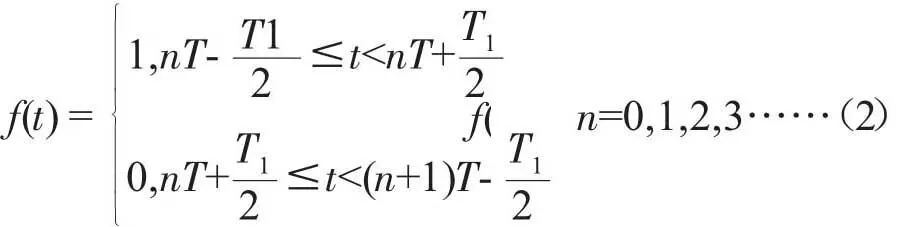
图4 f(t)函数
用一个矩形波函数f(t)(如图4)来表示信号Vs和Vr,

其中,V(t)是噪声和干扰,f(t)是一个纯数学函数,f(t-t0)表示信号经过电路后有了一定的相位延迟。
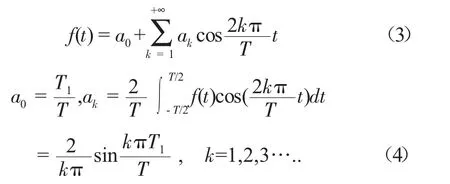
将f(t)作傅立叶级数展开,得到
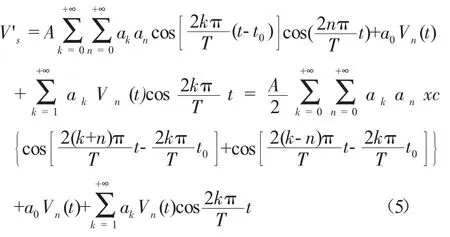
相关器的信号输出信号V's=Vs·Vr=Af(t-t0)·F(t)+Vn(t)·f(t),将(4)带入得到:
相关器的输出信号经过积分器 (实际上是一个滤波器)后,交流成分被滤去,留下直流成分:
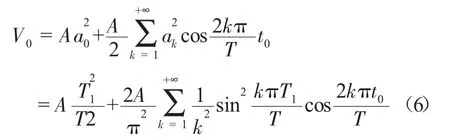
这个值与激光信号幅度A成正比。而噪声和非直流干扰由于与参考信号Vr不相关,与Vr相乘后是交流成分,经过滤波器后就被滤去了。
滤波器的R和C参数要选择得当。对于本课题来说,滤波器要尽可能的滤掉相关运算后输出来的交流成分;同时又要考虑系统的响应,激光目标指示器发射的激光制导脉冲重频为40Hz,所以滤波器的带宽应该在40Hz以上,且40Hz以内信号的相移要非常小。
4 总体设计
单片机是整个导引头搜索与跟踪控制系统的核心,单片机根据采集到的光电信号,判断是否找到目标并计算出目标的方位坐标。因为单片机只能处理数字量,而光电探测器采集到的光电信号为模拟量,因此模数转换是必需的。本课题中,采用AT89C51单片机作为控制芯片,模数转换采用ADC0808。其中,P1口用于接收四路光电信号。
程序开始后先进行初始化,对器件进行设置、定义变量。变量主要用于保存模数转换的结果,计算的中间结果,一些标志位等。器件设置主要是端口设置、ADC设置、中断设置等。
初始化完毕后,进行模数转换,根据转换的结果判断导引头是否搜索到目标以及目标所在的方位。
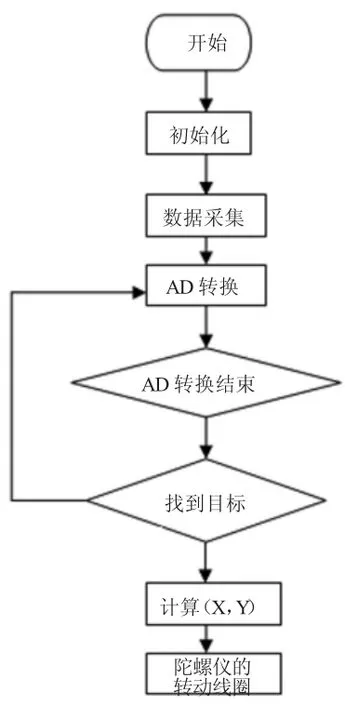
图5 程序主流程
程序开始后先进行初始化,对器件进行设置、定义变量。变量主要用于保存模数转换的结果,计算的中间结果,一些标志位等。器件设置主要是端口设置、ADC设置、中断设置等。
初始化完毕后,进行模数转换,根据转换的结果判断导引头是否搜索到目标以及目标所在的方位。
5 结束语
通过实验板的实验以及用软件仿真得到了预期的效果。能够完成由计算机生成场景,通过投影仪投到漫反射屏上,激光目标指示器则发射激光制导脉冲,投射到漫反射屏场景中的目标上,导引头能够捕获和跟踪目标上反射的激光光斑,引导导引头实时动态指向目标。