基于矩阵式变换器的多驱动混合电气传动系统研究
2012-02-20文良浩
文良浩,张 瑜
(南车株洲电力机车研究所有限公司,湖南 株洲 412001)
从20世纪80年代以来,研制一种全电动的战斗车辆,一直是战车工业界不懈追求的梦想。简单地说,全电动战斗车辆的定义,就是战车上的武器装备、防护装甲和驾驶系统都是依靠电力驱动和维持的。尽管现有的科技发展水平离这样的总体目标还有较长一段距离.但在某些领域已经取得了可喜的突破[1]。特别是混合电气传动技术,在最近10年有了长足的发展,很多国家都把这项新技术用在现役或正在研制中的战斗车辆上[2~7]。
混合电气传动技术的主要目的,是为了提升未来装甲车辆的操纵性能和机动性能,减少对大功率发动机的依赖。众所周知,未来的装甲车辆将越来越多地使用电子化、信息化的装备,比如先进的传感器、搜索雷达,甚至电磁炮等,这些都意味着机械化部队的作战将更加依靠电力的支撑。由于采用混合电气传动技术的战车,使用了大功率的发电机和蓄电池组,使得这些车辆在战时能成为机械化部队的移动电源。但有限的空间与对电源需求的多样性和故障状态下的生存能力的矛盾,又要求兵车具有结构紧凑、体积小、功能齐全的电力系统,这就为基于矩阵式变换器多驱动结合混合电气传动系统,提供了一个广阔的应用平台。
交直交矩阵变换器整流部分,是一个矩阵式的高频整流器,其开关工作频率高,具有矢量可自由组合、单位输入功率因数、输出电压可调且波形好的特点。系统采用一个带直流母线的整流器,直流输出脉动小,整体体积小,成本低,所连接的多路PWM逆变器,使输出交流电的波形接近正弦波,能够满足车辆上各种高精仪器设备的用电要求,适合各种车辆、舰艇等空间狭小的应用场合。
1 拓扑电路
矩阵变换器分为交-交型和交-直-交型两大类[8~13]。交-直-交型矩阵变换器的典型拓扑结构是l8开关的电路,由整流和逆变两部分组成。逆变部分是传统三相PWM逆变器,由6开关器件组成,整流部分由3/2相矩阵变换器的l2开关器件组成。在直流母线上,并接多个逆变电路和直流电路,构成一种新型的多驱动控制系统,如图1所示。

图1 多驱动混合电气传动系统的拓扑电路
其中M1和M2分别作为左右两侧车轮的驱动,采用混合转向系统,通过改变车体两侧车轮的速度,在高速行驶的情况下实现灵活转向[2]。
2 工作原理
2.1 问题的简化
交-直-交型矩阵变换器,与传统交-交型矩阵变换器有基本相同的输入输出性能,其分析方法也相似,因此可以采用传统交-交型矩阵变换器的双空间矢量PWM策略[14]。本文采用的控制策略,包括单位输入功率因数的空间矢量调制的整流控制和输出电压空间矢量的逆变控制,这种控制策略简单,并且适用于多驱动系统。为了简化问题的分析,作如下假定:
(1)输入侧无LC滤波器。

(2)三相输入电压:
(3)负载1三相输出电流:
(4)负载2三相输出电流:
(5)两个负载的功率因数角分别为准1、准2。
式(1)~式(3)中,
ωi是输入电压及电流的角频率;
ω01、ω02分别是1、2路负载的输出电压及电流的角频率;
φ01、φ02分别是 1、2 路负载 u 相输出电流的初相角;
U1是输入相电压的最大幅值;
I01、I02分别是1、2路负载输出相电流的最大幅值。
2.2 换流策略
矩阵变换器输出侧采用传统的DC/AC逆变电路,输入侧换流方法有四步换流和直流零电流换流两种[14~15]。由于存在蓄电池组,可能存在电流连续的情况,考虑到可靠性,输入侧以采用四步换流法为宜。
根据输入电压不能短路,输出电路不能开路的原则,安全切换要求同一相输出的任意2组开关不能同时导通,3组开关不能同时断开。
由于器件的开通时间、关断时间及驱动电路的时延都有差异,不能做到严格的同时切换。为了解决这个问题,N.Burany提出了四象限开关多步切换控制法,即四步换流策略,其过程如图2所示。

图2 四步换流法
1和2是同一输出相的两个双向开关,1c和2c是开关1和2的正向开关,1nc和2nc是反向开关。假定电流方向为正向,现在要关断开关1,开通开关2,要保证电流连续,又不能出现短路情况,共要经过四步才能完成换流。
(1)关断开关1的反向开关1nc,由于电流是正向流动,这一步不会带来开关损耗;
(2)开通开关2的正向开关2c,打开2c后,如果开关2所连接的电压高于开关1所连接的电压,那么电流将自动换流到2c中;
(3)关断开关1的正向开关1c,由于电流有一半的可能已经换流到2c中了,所以1c的关断有50%的可能性为零电流关断;
(4)开通开关2的反向开关2nc。
这样的四步换流策略,既禁止了电源发生短路的开关组合(1c和2nc,1nc和2c同时导通),又保证了在任意时刻给负载电流提供了至少一条流通路径(1c或2c),且换流过程中有一半的可能性,实现软开关中的零电流关断,所以被称为四步半软开关换流法。
3 不同工作状态下的控制策略
3.1 正常工作状态
(1)空间矢量调制的PWM整流。三相输入电压可分为6个区间,每个区间三相电压极性保持不变,其中一相电压具有正或负的最大幅值[16~17],如图3所示。
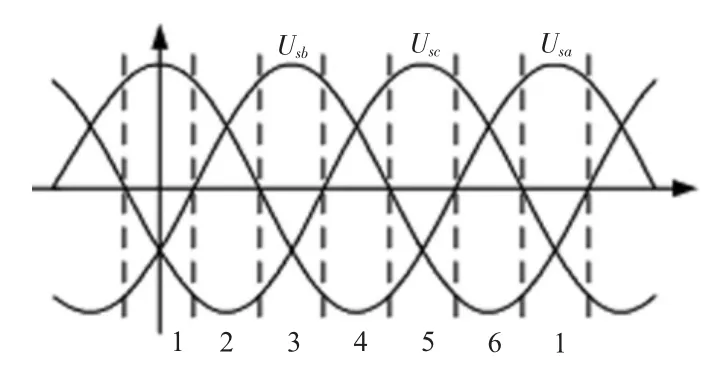
图3 一个周期内三相输入电压的6个区间
将一个开关周期Ts分为两部分,两部分输入侧开关的组合是不同的。为了获得最大输出电压和减小开关损耗,在每个区间内都固定一相输入电压于直流正极p或负极n,如表1所示。
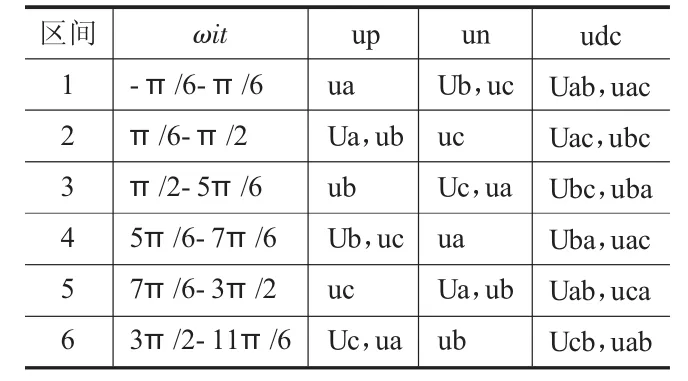
表1 输入相电压箝位表
下面以第5区间为例,说明单位输入功率因数的PWM整流控制策略。由于c相固定直流正极p,在一个开关周期内直流电压udc分别为线电压ucb和uca,因此在一个开关周期内直流电压平均值为:

其中,dcb、dca分别为ucb和uca在一个开关周期内的导通率,即占空比。
为了获得单位输入功率因数,必须保证基波输入电压和输入电流之间的同步关系:

由式(3)~式(7)可求得:

同理可求得在任意开关周期内:

其中,

(2)空间矢量调制的SVPWM逆变控制。图4中三相DC/AC逆变器共有6只功率开关,分别从正负母线接到三相输出 A、B、C,开关标号为 SPA、SPB、SPC和SnA、SnB、SnC。
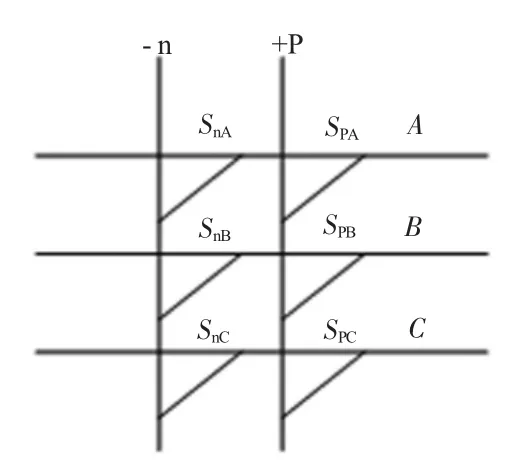
图4 直-交变换
正常工作过程下,A、B、C三相各只有一个功率开关闭合。设输入直流电压为Udc、某一状态为SPA、SnB、SnC闭合,则有 UAB=Udc、UBC=0、UCA=Udc,由空间矢量的定义和表达式得此时的线电压U1空间矢量为图5。
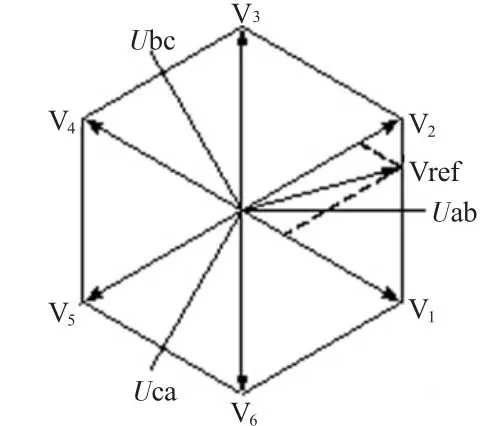
图5 六边形空间矢量
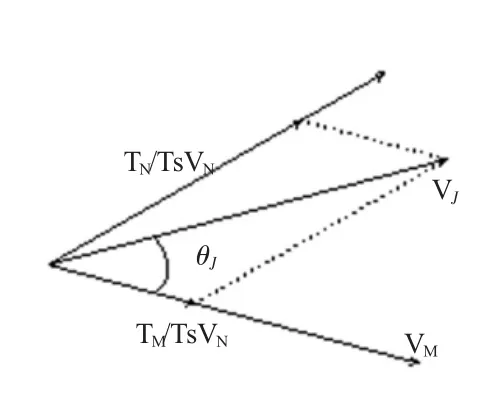
图6 电压空间矢量的调制
6只开关可能出现的不同组合列于表2,共有8种状态,其对应的空间矢量如图5所示,其中V1~V6是有效电压矢量,矢量间的相位差为60°角。表2中的V7、V8称为零矢量,即此时的输出电压为零。

表2 电压矢量开关组合表
为了得到以匀速旋转的空间矢量,须采用脉宽调制法(SVPWM)来合成。图6中VJ为要得到的某一瞬间的空间矢量,它落在六边形矢量中的某个区内,其相邻两矢量为VM和VN,VJ与VM的夹角为θJ。按空间矢量调制法,矢量VJ可以由VM和VN的分量组成:

式中,
TS为PWM周期;
V0为零矢量。
时间常数之比 TM/TS、TN/TS、TO/TS写成占空比形式为

则式(11)改写为

3.2 蓄电池组工作状态
蓄电池有两种工作状态:
(1)在车辆启动和低速状态,能量从蓄电池流向电机M1、M2和柴油发电机,此时发电机可以不启动,蓄电池组向逆变部分等提供直流电,相当于直流电源,通过SVPWM逆变控制,得到各种频率和幅值的三相交流电,作为兵车动力系统的临时电源,驱动M1和M2,使车辆利用蓄电池储存的电能安静地行驶,虽然速度不快,距离不长,但是却具有现实的战术意义;
(2)当发电机正常启动时,矩阵式整流部分工作,向逆变部分等供电,同时蓄电池组处于充电状态。蓄电池组的管理可以通过管理系统实现数字化管理[3]。
4 仿真及结果
4.1 系统仿真试验
在MATLAB/SIMULINK环境下,对图1拓扑电路做了仿真实验,变换器参数如下:
输入部分:Uin=500 V,fin=50 Hz,Lf=200 μH,Cf=50μF。
输出负载1为三相异步感应电机简单模型:PN=37 300 W,UN=460V,fN=60Hz,Rs=0.087 Ω,L1=5.974 mH,调制系数K1=0.4;
输出负载 2为阻感性负载:R2=100 Ω,L2=30 mH,out 2=40 Hz,调制系数 K2=0.6;
调制频率:8 kHz
负载电机在电动运行指令下运行,输出功率为37.3 kW。
仿真结果如图7所示。
(a)、(b)为矩阵式的整流直流电压和电流波形;
(c)、(d)为负载1定子电流和转子电流波形;
(e)为负载1启动时的转速波形;
(f)、(g)为逆变侧采用空间矢量调制的线电压和三相电流波形;
(h)为a相输入电流和输入电压波形,由图可见其输入功率因数接近于1,由于滤波电容的作用,使输入电流的相位略超前于输入电压。
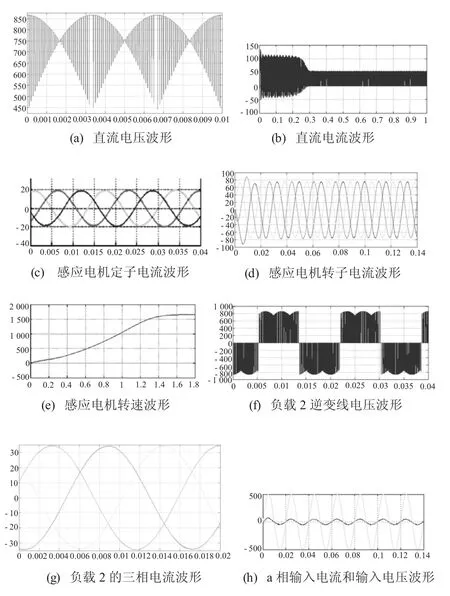
图7 多驱动系统仿真波形
4.2 输出负载1的仿真
图8 为系统稳态(电机转速1 000 r/min)时电磁转矩波形。
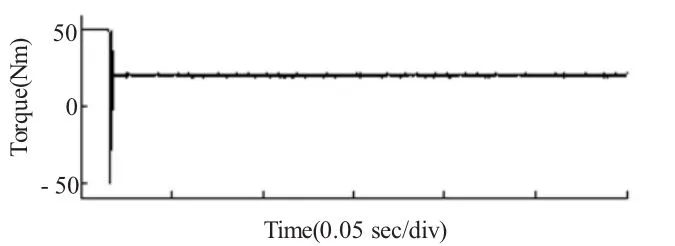
图8 系统稳态电磁转矩波形
图9 为动态变化时定子磁链波形。
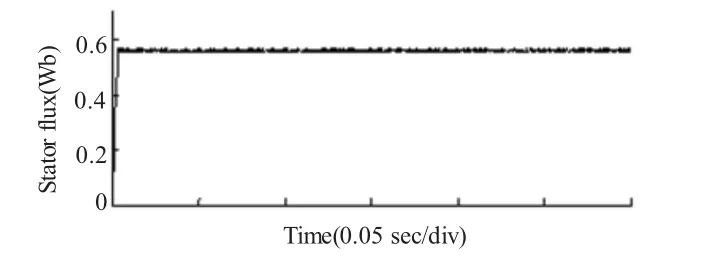
图9 动态变化时定子磁链波形
图10为动态电磁转矩,其中a为负载指令转矩;图b为负载转矩变化电磁转矩波形。

图10 动态电磁转矩
图11 为定子电流,其中图11a为系统稳态(电机转速1 000 r/min)时定子电流波形;图11b为负载转矩按图10a变化时定子电流波形。负载转矩发生变化时,定子电流能快速变化,并迅速回复到稳定状态。

图11 定子电流
5 结束语
本文针对电动战斗车辆对电源要求高、空间有限的工况,提出了基于矩阵变换器的多驱动混合电气传动系统,该系统具有以下特点:
(1)通过在3/2相矩阵整流器的直流侧,连接多个逆变级,即多个逆变级共享一个整流级,从而减少了电力装置设备的总质量和体积,降低了系统成本;
(2)集成度高,输入功率因数可调,能满足战斗车辆上的各种用电设备要求,提高整车电源系统的品质;
(3)有利于提高战斗车辆的机动性能和应变能力,为战斗车辆实现战术上的突破奠定良好的基础。
[1]程 松.混合电气传动——未来战车机动能力倍增器[J].兵器,2005,(1):16-19.
[2]吴军辉,黄声华,邹江峰.应用于混合动力汽车的三电平双向 DC/DC 变换器[J].电机技术,2006,(2):23-25.
[3]张忠义,羌嘉曦,杨 林,朱建新.混合动力汽车电池管理系统[J].机电工程技术,2006,35(1):61-64.
[4]麻友良,程全世.混合动力电动汽车的发展[J].公路交通科技,2001,18(1):78-80.
[5]钱立军,赵 韩,鲁付俊.混合动力汽车传动系结构分析[J].合肥工业大学学报,2003,26(6):1121-1126.
[6]胡 骅,宋 慧.电动汽车[M].北京:人民交通出版社,2003.
[7]岳东鹏,都志勇.张俊智.混合动力电动汽车研究开发及前景展望[J].拖拉机与农用运输车,2004,(4):1-4.
[8]J Holtz,U Boelkens.Direct Frequency Converter with Sinusoidal Line Currents for Speed-variable Motors[J].IEEE Trans on Industrial Electronics,1989,36(4):475-479.
[9]Iimori K,Shinohara K,Tarumi O Fu Z and et al.New Current-controlled PWMRectifier-voltage Source Inverter Without DC Link Components[J].Pro-edings of the Power Conversion Conference Naga-oka.Japan.Aug,1997,II(3-6):783-786.
[10]J W Kolar,M Baumann and et al.Novel three-phase ACDC-AC Sparse Matrix Converter[J].In Proceedings of 17th IEEE Applied Power Electronics Conference and Exposition,APEC 2002,(2):777-791.
[11]Wei L,H Chan,T A Lipo.Matrix Converter Topologies with Reduced Number of Switches[J].IEEE PESC Conference,Queensland Australia:June 2002,23-27,
[12]周 旭,朱建林,向 尕(ZHOU Xu,ZHU Jian-lin,XIANG Ga).集成化语言Matlab的Simulink仿真研究(Simulation Research on Simulink in Integration Language Matlab)[J].湘潭大学自然科学学报(Natural Science Journal of Xiangtan University),2000,(1):99-102.
[13]兰志勇,朱建林.三相稀疏矩阵变换器仿真研究[J].湘潭大学自然科学学报,2005,27(3):110-115.
[14]刘魏宏,朱建林,邓文浪,罗伟斌,张建华.基于交-直-交型矩阵变换器的多驱动系统的控制策略[J].中国电机工程学报,2006,26(6):111-115.
[15]丁 伟,朱建林,李志勇.空间矢量调制的矩阵式变换器的仿真模型[J].湘潭大学自然科学学报,2002,24(3):100-103.
[16]王 毅,陈希有,徐殿国(WANG Yi,CHEN Xi-you,XU Dian-guo).空间矢量调制矩阵变换器闭环控制的研究(The Research of Closed-loop Control Method for Matrix Converter based on Space Vector Modulation)[J].中国电机工程学报(Proceedings ofthe CSEE),2003,23(6):165-169.
[17]邓文浪,杨欣荣,朱建林.18开关双级矩阵变换器的空间矢量调制策略及其仿真研究[J].中国电机工程学报,2005,25(15):84-90.