水中弹药的电磁感应测速方法研究*
2012-02-10秦会国严文康王树山
秦会国,马 峰,仲 霄,卢 熹,严文康,王树山
(北京理工大学爆炸科学与技术国家重点实验室,北京 100081)
0 引 言
水中弹药的速度测试对其水动力布局设计和弹道特性研究具有重要的意义.通常水中弹药的速度测试装置分为两类:接触性测速装置和非接触性测速装置.接触性测速装置以通断靶为典型代表(如锡箔靶[1]),但水中弹药一般都具有带空泡弹道,接触性测速装置引起弹体周围空泡的脱落,从而改变弹丸的外弹道特性,造成测试结果的极大误差;非接触性测速装置分为光电式和电磁感应式两种,光电式测速装置如水下光幕靶测速系统[2],水下激光测速系统[3]和CCD水下速度测量系统[4],但由于水对光线具有吸收和散射特性,光的能量在水中衰减,导致光电接收器件接收到的信号弱,干扰信号大,光幕的光强不均匀问题以及空泡和水的高速流动对光幕的影响问题均难以解决;高速摄影法也可用于水下测速[5],但在水下布设高速摄影机非常困难,且价格昂贵,在复杂的水域环境(如杂质较多、水质混浊的水域)中难于应用;电磁感应式测速装置有单个线圈靶[6]和本文使用的双线圈靶,单个线圈靶通过分析感应电动势的曲线来测速,但感应电动势曲线受弹体穿靶姿态和外界环境影响较大,测试结果误差大,且至今没有成型的测试装置,其可行性还需深入的理论研究和实验验证.石晓晶等[7]用密封线圈靶对水下枪弹速度进行了测试,但未针对水介质特性对线圈靶的影响问题进行抗干扰设计,能否测试高速弹体的速度还不明确.美国海军水下作战中心(NUWC)的超空泡高速弹体试验场[8-9]利用速度线圈对可以进行高速弹体速度的测试,但出于保密等原因,无法获得有价值的技术资料.
基于上述几种水下测速方法的不足,以及水中弹药速度测试技术的发展需要,本文设计了一种基于电磁感应原理的水下测速装应式线圈靶水下测速系统.该系统具有结构简单、受水介质特性干扰小、成本较低以及数据处理方便等优点,而且对水中弹药的外弹道无影响,解决了空泡干扰问题以及水介质特性对测速装置的影响问题,可广泛应用于水中弹药的速度测试.
1 水下感应式线圈靶
1.1 感应式线圈靶的测速原理
感应式线圈靶测速是用弹体穿过螺线管引起的磁场变化而产生感应电动势的原理来测速的[10].如图1所示 ,弹丸经磁化处理,在弹丸预定弹道上放置距离为S的两个线圈靶 Ⅰ和 Ⅱ,弹丸以垂直于线圈平面的速度穿过两线圈靶的中心,引起线圈内磁通量的变化,在线圈内产生感应电动势,用瞬态波形存储器记录感应电动势信号.判读感应电动势信号得到弹丸穿过两线圈靶的时刻t1和t2,则弹丸经过两线圈靶的时间为t12=t2-t1,由平均速度法,弹丸在两靶之间的平均速度为


图1 感应式线圈靶的测速原理Fig.1 V elocity measurem en t principle with conduction-type coil target
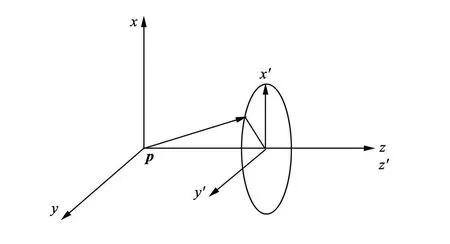
图2 磁偶极子同轴穿越线圈靶的坐标系Fig.2 Coordinatesystem w hilemagnetic dipole flying th rough coil
为分析线圈内产生的感应电动势信号,可以把磁化弹丸简化为一个正、负点磁荷构成的磁偶极子,磁矩为p,假设磁矩p的方向与线圈轴线方向一致.因此线圈靶的机理分析转化为磁矩为 p的点磁偶极子沿中心轴穿过半径为,匝数为N的线圈时,线圈上产生的电动势分析,如图2所示.点磁偶极子在空间任一点的标量势U为

空间任一点的磁感应强度B为

因此,通过线圈平面的磁通量φ为

式中:μ0为线圈的导磁率;ρ为线圈平面上的径向积分变量,范围从0~RL.
当磁偶极子接近或离开线圈时,磁通量发生变化,产生感应电动势e为

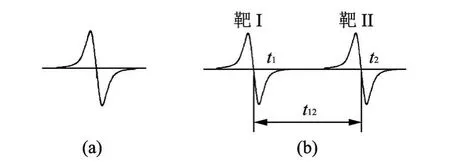
图3 感应电动势信号Fig.3 Induced electrom otive force signal
感应电动势形状如图3(a)所示.由式(5)可知,当弹丸穿过线圈中心平面(z=0)时,无论其是否通过线圈中心,感应电动势都是零,图3(b)中t1和t2分别对应图1中弹丸穿过靶 Ⅰ和 Ⅱ的时刻.因此选择感应电动势的过零点作为区截点计算弹丸经过两靶的时间t12是最准确的.
1.2 水介质特性对感应式线圈靶的影响和解决措施
水和空气是两种完全不同的介质,水介质具有导电性,而且是不可压缩的,水在流动状态下会对弹体的磁场产生影响,同时弹体在水下的运动常常伴随着空泡,在空气中使用的感应式线圈靶不能直接应用于水下,可能存在的问题及解决措施如下:
1)线圈靶的绝缘问题.线圈靶一般用漆包线绕制,漆包线中心是铜丝,外层是绝缘层,但在使用中由于摩擦等原因,可能会出现绝缘层脱落的现象.由于水是弱电解质,具有导电性,漆包线由于绝缘层脱落直接与水连通,可能导致线圈内不会产生感应电动势信号或造成线圈内产生干扰信号.因而必须将线圈靶密封.解决办法是将线圈绕制在自制的尼龙框架内,如图4所示,框架的缝隙处采用玻璃胶密封,使线圈靶与水介质绝缘;

图4 防水密封感应式线圈靶F ig.4 Waterproof-type and conduction-type coil target
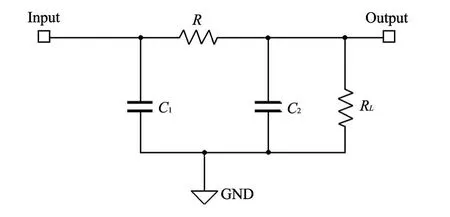
图5 滤波电路F ig.5 Filter circuit
2)水中杂质和空泡等对信号的干扰问题.由于在测试过程中可能会受到空泡、尾流、冲击波和水中杂质等的干扰,线圈内产生的感应电动势会参杂一系列杂波信号,当干扰较大时,杂波信号的幅值甚至超过电动势信号的大小,造成测试仪器误启动.而杂波信号一般以脉冲信号为主,用 RC滤波电路就可消除,因此在测试电路中加入RC滤波电路,可消除干扰信号的影响,如图5所示;
3)线圈靶的布放对水下弹丸弹道特性的影响.弹丸在水下运动时经常伴随着空泡,空泡尺寸较弹丸尺寸大,空泡直径甚至超过几倍弹径,同时弹体周围的水介质也被带动进入流动状态.由于水介质是不可压缩的,将线圈靶置于弹丸弹道上可能会影响空泡形态和水的流动,进而影响弹丸弹道特性.根据空泡动力学理论以及水洞实验[11]的研究结果,在横截面积为190 mm×70 mm的水洞内研究直径 20mm弹体周围空泡形态,水洞壁面对空泡形态基本没有影响.本系统采用的线圈靶直径是150mm,测试弹体直径是12mm,可确保在水中布放线圈靶不会影响弹丸的弹道特性;
4)水介质对弹体磁场的影响.水是弱电解质,水中的正负离子在弹体磁场中运动时会产生微弱电流,在弹体周围水介质的复杂流动状态下,微弱电流发生变化并产生变化的磁场,可能会影响弹体磁场.但弹体入水前经过强磁化,水中正负离子运动产生的磁场是极其微弱的,两者存在数量级上的巨大差别,水介质运动产生的磁场对弹体磁场的影响可以忽略不计.
2 水中弹药速度测试实验
2.1 感应式线圈靶水下测速系统
该测试系统的组成是:线圈靶(图4)、水箱(图6)、发射装置和测试弹丸(图7)、滤波与放大电路(图8)、电源、采集示波器和高速摄影机(图6).系统连接如图9所示.线圈靶由直径0.6mm的漆包线绕制在尼龙框架内,靶直径是150mm,线圈匝数是150,线圈靶框架的缝隙处采用玻璃胶密封,保证线圈靶与水绝缘.实验时两线圈靶配对使用,线圈缠绕均匀、一致性良好,且接线条件保持一致.滤波与放大电路采用LF357主放大芯片,并采用 ±12 V电源供电,放大倍数可以调节,其作用是将线圈靶输出的微弱电动势信号放大,并滤除干扰信号后输出至示波器显示.示波器用于采集感应电动势信号并输出显示,采用电平触发方式.测试弹丸直径是12 mm,实验前对其进行磁化处理,实验时用发射装置垂直射入水中.由前面的分析,在水中布放线圈靶不会影响弹丸的弹道特性.由于测试弹丸需要经过磁化处理,因此本测试系统多应用在水中弹药的设计和水下弹道基础研究实验中.磁化处理可能会改变弹丸的弹体特征,因而在靶场实验中能否使用视具体情况而定.
系统采用的高速摄影机型号为FASTCAMSA3,布置在水箱外侧(图6),其作用是:①拍摄弹丸的水下弹道,观察弹丸弹道与两线圈靶中心连线是否平行.因为根据文献[12],两靶中心连线与弹道平行时,测试结果准确度高;②测量弹丸速度,并与线圈靶测试结果进行对比.实验用水为纯水,因而高速摄影拍摄效果十分清晰,分辨率极高,弹丸速度测试结果的准确度很高.若复杂水域环境中的光线条件不好,可利用照明设备照射来增加水中光强度或对水质进行净化处理,以提高高速摄影的拍摄效果.

图6 高速摄影机和水箱Fig.6 High speed camera and w ater tank

图7 发射装置和测试弹丸Fig.7 Launching unit and measurement projectile
实验在玻璃水箱内进行,测试系统示意图如图9所示,可见该测试系统具有结构简单、可重复使用的特点.将线圈靶固定在水中,靶面与水面平行;发射装置口垂直于水面,保证弹丸垂直发射;但线圈靶不宜离发射装置口太远,以免弹丸弹道偏离线圈靶中心太多或脱靶,引起较大测试误差.高速摄影布置在水箱外侧,拍摄弹丸的整个弹道过程;示波器设置成电平触发方式等待触发.实验时可改变发射药筒型号,使测试弹丸获得不同的速度进行测试.
图8 滤波与放大电路Fig.8 Filter and amplifier circuit
图9 感应式线圈靶水下测速系统示意图Fig.9 Schem atic diagram of velocity measurem en t system w ith conduction-type coil target
根据感应式线圈靶的测速原理,测试速度是弹丸在两个线圈靶距离上的平均速度(式 1).而弹丸在水下所受阻力很大(约为空气中阻力的800倍),速度衰减非常快,因此,利用线圈靶测速系统测试弹丸在一段弹道上的平均速度时,靶距S越小,测试结果准确度越高.而根据文献[6],感应电动势信号(图3 (b))中波峰和波谷之间的距离为靶半径RL,若两线圈靶的感应电动势信号互不干扰,靶距至少应为一个靶直径长度(2RL).为保证测试结果的准确度,本实验中设置靶距为S=2RL=15 cm.
2.2 实验数据处理与结果分析
图10是示波器采集到的感应电动势信号,为弹丸穿过上、下两个线圈靶时产生的过靶信号.前一个信号作为启动信号,后一个信号作为截止信号.根据前面的分析,感应电动势的过零点是区截点的最佳选择,用示波器的Cursors功能键可判读出两个感应电动势零点之间的时间t12.靶距S在布靶前设定,根据公式(1)就可得到弹丸的平均速度.
同时分析图10得出,经滤波与放大后的感应电动势信号非常清晰,基本不存在干扰信号.说明本测速系统可以大大降低水介质特性的干扰,同时又是一种非接触性测试装置,对弹丸的带空泡弹道基本没有影响,系统测试结果准确度高.

图10 感应电动势信号Fig.10 Induced electromo tive forcesignal
图11 弹丸穿靶过程Fig.11 Penetrating target course of projectile
高速摄影的拍摄速率为5 000f/s,图11中给出了一组弹丸穿靶图像.可以看出:①弹丸弹道以及弹体与水介质的分界面清晰,拍摄速率满足速度测试要求;②线圈靶的布放对弹丸带空泡弹道没有影响;③弹丸的弹道轨迹较为平直,在较短距离上弹道轨迹近似为直线.前面说明利用高速摄影可以确保弹丸弹道与两线圈靶中心连线平行,从而提高测试精度.而在高速摄影使用困难的介质环境中,可预先设置两靶中心连线与弹丸的预定弹道平行,并在两靶互不干扰的前提下设置靶距尽量小,而水下弹丸的弹道轨迹在较短的距离上不会发生太大偏转,可基本保证弹丸弹道与两靶中心连线平行.
处理高速摄影图像,得到弹丸穿过两靶的平均速度v′,并与线圈靶测得的速度v进行对比,如表1所示.其中线圈靶的靶距有S=15 cm和S=20 cm两种,以对不同靶距结果的测试精度进行对比.
表1 实验数据Tab.1 Ex per imental data
分析表中数据得出:
1)感应式线圈靶与高速摄影的测速结果相比具有一定的偏差,但相对偏差在5%以内.
文献[5]显示,高速摄影是一种测试准确度和精度都较高的水下测速装置,且本实验在纯水中进行,高速摄影拍摄的弹丸弹道及弹体与水介质界面非常清晰,其测速结果准确度很高.感应式线圈靶测速系统和高速摄影测速结果的偏差范围都在5%以内,说明感应式线圈靶测速系统也具有较高的测速精度,能满足一般水弹道速度测试的需求.
2)感应式线圈靶与高速摄影的测速结果相比,靶距S=15 cm比靶距S=20 cm的测速结果的相对偏差要小.即若以高速摄影的测速结果为准,在两靶互不干扰的前提下,靶距越小,测试结果的精度越高.
根据感应式线圈靶的测速原理,测试误差的主要来源是靶距测量误差和时间测量误差.靶距测量误差可能是由于弹丸弹道与靶平面不垂直及测量工具存在误差等原因造成的;时间测量误差可能是由于测试仪器本身的测试精度较低和判读误差等造成的.
2.3 测速系统的适用范围
表1中数据对应的感应电动势峰值范围是0.61~0.86 V,实验条件为放大电路放大倍数是100,示波器数据采集通道单位为1 V/格.根据公式(5),感应电动势的大小与弹丸速度成正比,若示波器数据采集通道的单位为10 V/格(最大)时,测试速度上限可达到1 076.7 m/s;若放大倍数小于100时,测试速度下限可低于65.4m/s,因此,本测试系统的测速范围非常宽.由于发射装置采用发射药的限制,不能获得v<65.4 m/s和92.6m/s<v<1 076.7m/s范围内的速度,但理论上测试系统可对这两个范围内的速度进行测量.
本测试系统采用的线圈靶直径是150 mm,弹丸直径是12 mm,线圈靶直径远大于弹丸直径,在水中布设线圈靶不会影响弹丸的弹道特性,因而可对直径12mm的水下弹丸的速度进行测试.理论上,在线圈靶不影响弹丸弹道特性的基础上,本测试系统可对直径大于 12 mm的弹丸速度进行测试,如30 mm高速射弹;当线圈靶尺寸增大时,可对直径更大的弹体速度进行测试,如对鱼雷和导弹速度的测试,但在实际应用中还需进一步的理论研究和实验验证.
3 结 论
1)水下感应式线圈靶测速系统基本不受水介质特性的干扰,测得的感应电动势信号中没有干扰信号;
2)水下感应式线圈靶测速系统与高速摄影测速结果的相对偏差在5%以内,说明该系统具有一定的测试精度,能满足一般水弹道的速度测试需求;
3)水下感应式线圈靶测速系统具有结构简单、可重复使用、对弹丸外弹道无影响等优点.
[1] 李盘文.水下高速航行体的测速技术研究[D].南京:南京理工大学,2008.
[2] 林松.水下光幕靶的研制[D].南京:南京理工大学,2007.
[3] 袁永普,解春莲.水下激光测速系统[J].测试技术学报,2004,18(增刊):101-104.
Yuan Yongpu,Xie Chun lian.A velocity measurement system based on underwater laser[J].Journal of Test and Measurement Technology,2004,18(Supp.):101-104.(in Chinese)
[4] 狄长安,王昌明.线阵CCD测量水下枪弹速度的方法[J].南京理工大学学报,2002,26(3):243-246.
DiChangan,Wang Changming.A velocity measurementmethod of underwater bullet by linear scan CCD[J].Journal of Nan jing University of Scienceand Technology,2002,26(3):243-246.(in Chinese)
[5] 吴中平,吴乔.利用高速摄影测量水下物体的运动速度[J].水雷战与舰船防护,2007,15(1):21-23.
Wu Zhongping,Wu Qiao.Moving velocity ofunderw ater objectby high-speed photography[J].MineWarfare&Ship Self-Define,2007,15(1):21-23.(in Chinese)
[6] 沈勇,狄长安.单个线圈靶速度测量分析[J].传感器技术,2001,20(12):1-3.
Shen Yong,DiChangan.Analysis of velocity measurement w ith single coil target[J].Journal of Transducer Technology, 2001,20(12):1-3.(in Chinese)
[7] 石晓晶,王昌明.水下枪械弹丸飞行速度的测试[J].弹道学报,1998,10(2):74-77.
Shi Xiaojing,Wang Changm ing.Velocitymeasurementof underw ater projectile[J].Journal of Ballistic,1998,10(2):74-77.(in Chinese)
[8] H rubes JD,Henoch CW,Kirschner IN,etal.NUWCSupercavitating High-speed Bodies TestRange[C].Proceedingsof the1998 ITTCCon ference,1998.
[9] Michel JM,Savchenko Y N.ADA 400728 Supercavitating Flows[S].Brussels:The Research and Technology Organisation of NATO,2002.
[10] Xiong Xianfeng,Kong Deren,Ruan Xiaofeng.Mechanism analysis of induction-type coil target for velocity measurement [J].Advanced Materials Research,2011,30(3):666-670.
[11] 魏卓慧.高速弹体斜入水弹道研究[D].北京:北京理工大学,2009.
[12] 陈遵银,吴卫玲.线圈靶测速误差分析[J].计量技术,2000(5):12-14.
Chen Zunyin,Wu Weiling.Analysis ofmeasurementerror of coil target[J].Measurement Technique,2000(5):12-14. (in Chinese)