基于DSP的测控系统设计❋
2012-02-09林德福
王 伟,徐 平,林德福,张 健
(1.北京理工大学宇航学院,北京 100081;2.中国兵器工业集团西北工业集团有限公司,陕西西安 710043)
弹载计算机[1](文中简称测控系统)是战术导弹飞行控制系统的核心,是实施导弹发射和飞行控制的“指挥中枢”,其主要任务是控制导弹按预定弹道稳定飞行,直至准确命中目标,并在飞行过程中控制弹上各系统进行工作状态的转换,以及协调各系统之间的信号传递.其性能好坏直接关系到制导的精度和对目标的杀伤概率.
测试控制计算机要求具有高精度、小型化、实时性、可靠性、嵌入式[2]等特点.随着芯片的制造工艺的进步,集成众多的片上系统芯片性能增强,外部电路精简.其中DSP以其强大的指令系统及接口功能显示出功能完善、运算速度快、开发方便等方面的优势[3].能够有效解决运算速度和体积的矛盾.实时性要求对输入的导航数据以最快的速度处理并以最小的延时输出控制信号.可靠性要求系统抗干扰能力强,要有较宽的工作温度范围和抗电磁干扰能力强.嵌入性要求尽量轻、体积小.这些条件在设计系统时都要综合考虑以达到最优化的性能设计.
1 系统综述
文中基于DSP28335[4]设计的测试控制系统,可以根据GPS定位信息,双轴加速度计和三轴角速度陀螺输出信号,实现多种控制策略和控制算法,并可以通过外扩将FLASH存储飞行过程中的数据记录下来,通过USB接口或者串口读取导弹飞行过程中的试验数据,便于分析试验结果.
2 控制系统设计分析
2.1 控制系统的设计需求
测试控制系统一般采取模块化的结构设计,包括核心控制模块、信号调理模块、以及数据存储模块等.核心控制模块应该达到以下要求:
1)具有低功耗模式,具备多种串行外设,大的容量程序存储空间以便于满足复杂控制软件的开发;执行效率高便于满足计算量很大的控制任务.
2)具有多路模拟信号的高精度采集能力,采集双轴加速度计,三轴角速率陀螺,温度传感器,电源电压等信号.
3)具有开关量离散信号、模拟信号和 PWM脉冲等,控制信号的输入、输出能力,以适应不同控制信号的需求.
只有满足上述要求的核心控制模块才能够满足复杂的测试控制系统的需求.
2.2 控制系统的实现
系统硬件电路包括信号处理模块,信号调理和接口模块(具体包括前端数据采集,捕获单元,放大驱动舵机模块,串口接口等),数据存储模块等.具体控制方案系统图见图1.
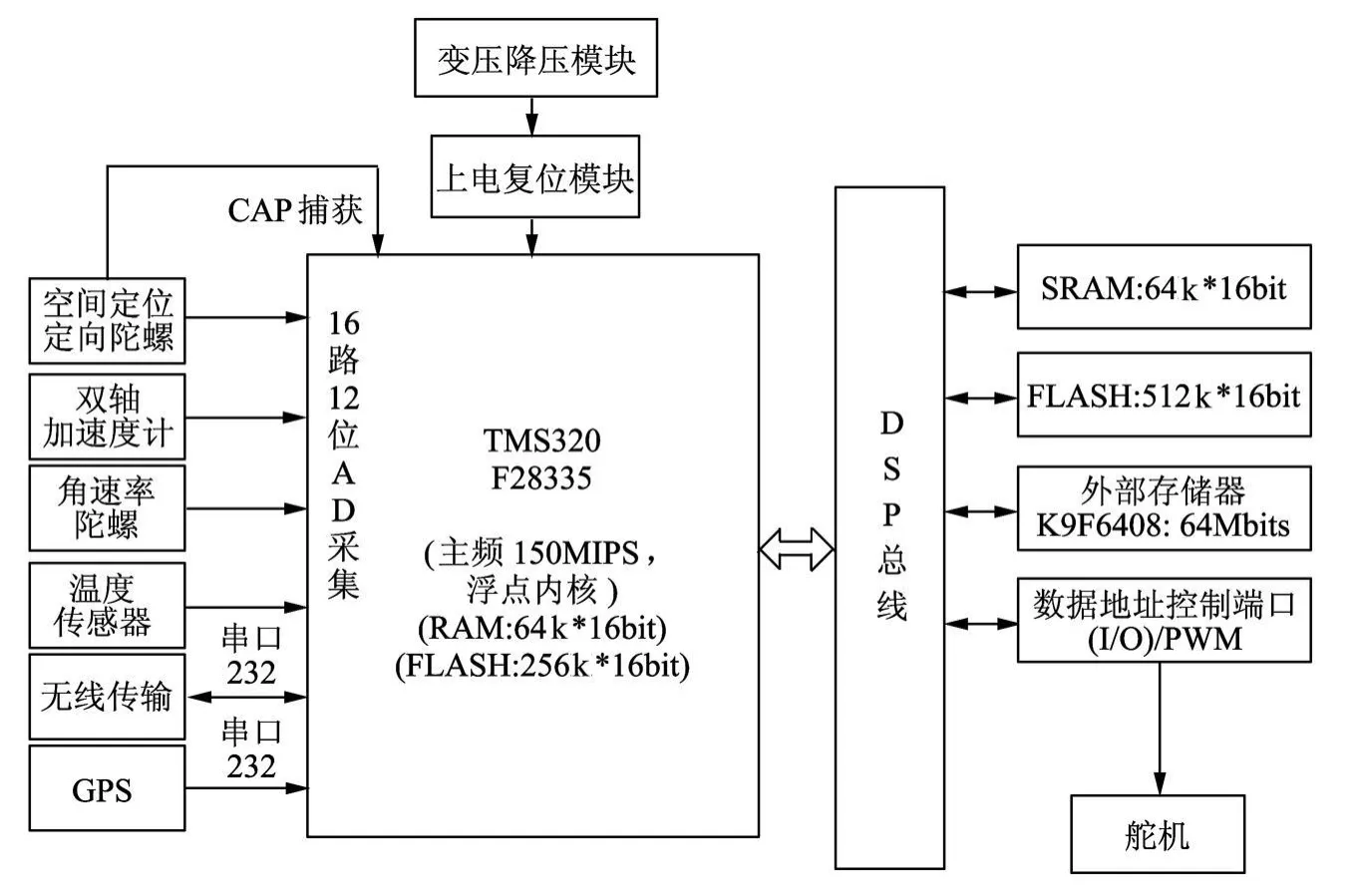
图1 控制系统方案组成图Fig.1 The d iagram of control system com ponents
3 信号处理模块设计
测试控制计算机需要在很短时间内完成数据采集,数字滤波,实现预订算法等大量的工作,要求测控计算机具有很高的运算速度,同时,为满足体积、质量以及功耗的要求,微处理器体积要小,而且具有很强的接口功能.本系统采用了T I公司的32位浮点型 TMS320F28335[5-6]作为系统的CPU.
TMS320F28335的基本特点[7-8]如下:
1)具有高速的浮点运算能力,高性能的静态CMOS技术,指令周期为6.67 ns,主频达150 MHz.
2)片上RAM 68 k*16 bit,片上FLASH 256 k*16 bit.
3)增强型的外设模块:3个32位的定时器,18个PWM输出,包含6个高分辨率的脉宽调制模块(HRPWM),6个事件捕获输入,2通道的正交调制模块.
4)串行外设为2通道CAN模块,3通道SCI模块,2个McBSP(多通道缓冲串行接口)模块,1个SPI模块,1个I2C主从兼容的串行总线接口模块.
5)12位的AD转换器具有16个转换通道,2个采样保持器,内外部参考电压,转化速度为80 ns,同时支持多通道转换.
6)低功耗模式,1.9 V内核,3.3 VIO供电.
7)符合IEEE1149.1标准的片内扫描仿真接口JTAG.
信息处理模块[9-10]的这些基本特点能够满足控制系统的需求,尤其由于主芯片TMS320F28335的浮点架构,它大大减小了编程难度,采用哈佛流水线结构,能够快速执行中断响应,并具有统一的内存管理模式,可用C/C++语言实现复杂的数学算法.信号处理模块的电源部分如图2所示.电源转换电路提供的+3.3 V给信号处理模块的IO供电,+1.8 V给CPU供电.
4 信号调理及接口模块设计
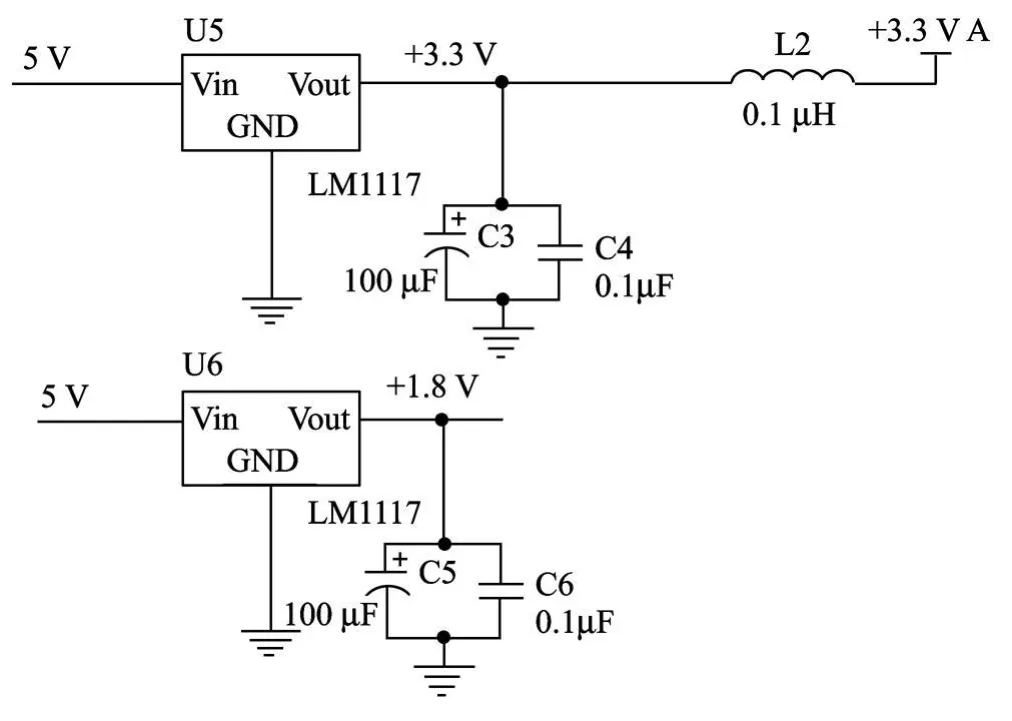
图2 信号处理模块电源电路Fig.2 The pow er supply circuit of Signal p rocessingmodule
信号调理及接口模块包括AD采集模块,485模块,232转换模块,输出控制模块等.
4.1 AD采集模块
AD采集模块的芯片选用外部转换器AD1674,AD1674是美国模拟器件公司(Analog Device)生产的12位逐次逼近型快速A/D转换器.AD1674的基本特点:
1)带有内部采样保持的完全12位逐次逼近(SAR)型模/数转换器;
2)采样频率为100 kH z,转换时间为10μs;
3)具有 ±1/2LSB的积分非线性(INL)以及 12位无漏码的差分非线性(DNL);
4)满量程校准误差为0.125%;
5)4种单极或双极电压输入范围分别为5 V,10 V,0~10 V和0~20 V;
6)数据可并行输出,采用8/12位可选微处理器总线接口;
7)内部带有防静电保护装置(ESD),放电耐压值可达4 000 V.
采集模块的系统方块图如图3所示.
4.2 串口通信模块
本系统中仅用了两个串口单元,一个为232单元,另一个为485单元,如果在使用的过程中运用到更多的串口中断,可以采用TI的TL16C554扩展串行口,TL16C554集成度高,性能稳定.在系统中,232模块用于GPS之间的数据传输,得到导弹在飞行过程中的经度,纬度,高度,以及速度.RS485模块用于无线传输模块与核心处理模块之间的数据传输,如目标特性等.使用国际标准的 RS485差分方式,使通讯的速率和通讯距离均大于RS232的标准接口方式,并且用线最少.RS232模块的基本电路如图4所示.
485模块的基本电路如图5所示.

图3 采集模块系统原理框图Fig.3 The block diagram of Acquisition modulesystem

图4 232模块基本电路图Fig.4 Basic circuitm odule 232

图5 485模块基本电路图Fig.5 Basic circuitm odule 485

图6 光耦TLP521-1基本电路图Fig.6 Optocoupler TLP521-1 Basic circuit diagram
4.3 输出控制模块
输出控制模块主要是用于驱动舵机工作,因为主芯片 TMS320F28335通过 PWM调制后输出 4路脉宽可调信号,经过光耦后将电压调整到12 V,从而驱动舵机.弹上电磁环境差,控制参数多,各种传感器,电源,舵机系统组合较复杂,当各种噪声及干扰对系统的影响采用滤波法不能有效抑制时,必须采用光电隔离的方法,从而抑制干扰信号的影响.光耦选用TI公司的4路光耦TLP521-4,该芯片是由 4路光耦组合而成,故给出其中一路光耦应用信号.
5 存储模块设计
在本系统中,飞行过程中的双轴加速度计,三轴角速率陀螺输出信号,GPS信号,无线传输模块的信号以及中间解算出的有关弹体姿态和输出舵机的控制指令等大量数据都需要实时记录,因此,设计大容量存储的存储模块是很有实际意义的.目前,基于 NAND技术的FLASH具有很大容量,在本系统中,选用了K9F6408U 0M存储器.该存储器的主要性能包括检错(对FLASH内部坏扇区的检测)、写操作(写入数据)、读操作(从FLASH中读出数据)、空间管理和擦除操作.

图7 主芯片与存储器连接示意图F ig.7 Them ain ch ip and the m em ory connection diagram
6 结 论
经过测试试验,该测试控制系统信号处理单元在0.2ms内完成过载指令计算,解算准确快速,能够对外部传感器信号真实准确地记录并加以运用,GPS与测控计算机通信正常,无线传输模块在地面和弹上均工作正常,测控系统解算生成的控制指令实时分配给舵机,舵机产生的有效力与理论设计误差小于0.1%.试验表明,本设计方案采用的测控系统在姿态解算方面与T IDSP6713具有类似的浮点解算能力特点的同时成本要低15倍左右,具备精度高,成本低的特点;测控系统可以同时满足外部多种传感器,较同类的单片机要功能全面,处理速度高,实时性好;测控系统的设计平台很广,可以迅速推广到 TI系列的MSP430单片机系列和TI工业控制类的 TI2000系列,通用性好;由于测控系统封装简单,因此比DSP6713等工艺简单,两层板即满足要求,同时体积较小,在 Φ40的空间下即可完整装置,工作电流在100 mA以内,小型化,低功耗.
[1] 杨新状,许承东,李怀建,等.SINS/GPS组合导航计算机系统设计与开发[J].弹箭与制导学报,2004,24(1):34-36.
Yang Xinzhuang,Xu Chengdong,Li Huaijian,et al.The design and developmen t of SINS/GPS integrated nav igation computer system[J].2004,24(1):34-36.(in Chinese)
[2] 刘剑慰,雷亚平,杨忠.基于DSP的UAV飞控计算机的设计与实现[J].航天制造技术,2004(2):24-25.
Liu Jianwei,Lei Yaping,Yang Zhong.DSP-based UAV flight control design and implementation of computer[J].Aerospace Manufacturing Technology,2004(2):24-25.(in Chinese)
[3] 沈绪榜.弹(箭)载计算机[M].北京:宇航出版社,1989.
[4] TexasInstruments.TMS320F28335,TMS320F28334,TMS320-F28332DataSheet[DB/OL].[2007-04-23].http://wwws.ti.com/sc/techlit.
[5] TexasInstrumentsInc.TMS320F28335,TMS320F28334,TMS320F28332,TMS320F28235,TMS320F28234,TMS-320F28232 Digital Signal Controllers(DSCs)Data Manual[EB/OL].[2009-06-06].http://focus.ti.com.cn/cn/docs/pro/folders/print/tms320f28335.htm l.
[6] Texas Instruments Inc.TMS320F2810,TMS320F2811,TMS320F2812,TMS320C2810,TMS320C2811,TMS320C2812 Digital Signal Controllers(DSCs)Data Manual[EB/OL].[2004-11-16].http://focus.ti.com.cn/cn/docs/prod/folders/print/tms320f2812.htm l.
[7] 张卫宁.TMS320C28x系列DSP的CPU与外设(上,下)[M].北京:清华大学出版社,2004.
[8] 苏奎峰,吕强,耿庆锋,等.TMS320F2812原理与开发[M].北京:电子工业出版社,2005.
[9] 宋莹,高强,徐殿国,等.新型浮点型DSP芯片TMS320F283xx[J].微处理机,2010(1):20-26.
Song Ying,Gao Qiang,Xu Dianguo,et al.A new floating point DSP chip TMS320F283xx[J].Microprocessors,2010(1):20-26.(in Chinese)
[10] 刘明,张严,徐德民.基于新型浮点DSP的AUV导航计算机系统设计[J].鱼雷技术,2010(10):362-366.
Liu Ming,Zhang Yan,Xu Demin.Design of AUV navigation computer system based on new type of floating-point DSP[J].Torpedo Technology,2010(10):362-366.(in Chinese)