基于模糊逻辑的混合动力汽车控制策略研究
2012-01-23徐小东张冰战
徐小东, 张冰战
(1.安徽交通职业技术学院 汽车与机械工程系,安徽 合肥 230051;2.合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
0 引 言
能源短缺和环境污染是当今世界面临的两大难题,插电式混合动力汽车(Plug-in Hybrid Electric Vehicles,简称PHEV)是电动汽车发展过程中新出现的一种低油耗、低排放且不受续驶里程限制,兼具纯电动汽车和传统燃油汽车优点的新型汽车[1-2]。由于其在经济和环境等方面的综合优势,发展PHEV被认为是当前解决这两大难题的有效途径。混合动力汽车的能量管理策略是混合动力汽车控制系统的核心,基于特定的能量管理策略,根据不同的行驶工况,采用不同的动力系统工作模式,获得传统汽车所不能达到的优化控制目标[3-4]。
目前应用最广泛的是基于规则的控制策略,其实质是通过对系统的研究,根据工程经验表述成可用计算机处理的简单推理规则,利用逻辑判断来实现动力系统工作模式的切换及功率分配[5-6]。与经典逻辑相比,在模仿人的推理和决策行为方面,模糊控制更接近人的思维方式,表述上更接近自然语言的形式,并且鲁棒性强、对参数不敏感,在混合动力汽车控制中得到广泛的应用。
本文根据PHEV电池存储的能量在整个行驶工况都期望能得到合理分配的特点,提出一种基于转矩分配的模糊控制策略,并且把路况里程也作为一个输入条件来考虑,使得电量消耗续驶里程能尽量接近总行驶里程,并且燃油经济性能得到提高。
1 动力系统结构组成
混合动力系统结构如图1所示,整车由发动机、电机、电机控制器、动力电池组、自动变速箱、力矩合成器、主减速器和车轮等组成,各个部件通过CAN总线接受整车控制单元的指令并将信号反馈给整车控制器,整车控制器通过一定的能量管理策略分配能量。样车采用发动机和电机2套驱动系统,以发动机为主动力源,电机为辅助动力源。发动机通过机械装置与驱动桥联接,电机通过力矩合成器也与驱动桥相联,发动机和电机可以单独工作,也可以联合工作共同为驱动轮提供转矩。可以通过调节电机的输出功率,起到“削峰平谷”的作用,使发动机一直工作在高效区域,来减少排放,提高燃油经济性。
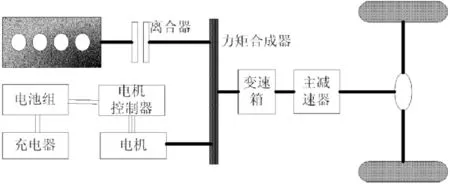
图1 混合动力系统结构
2 模糊控制策略建模
常用的控制策略是根据电池的SOC、驾驶员的加速或制动踏板位置、转矩和车速等参数,按照一定的规则确定发动机和电机输出相应的转矩,以满足驱动力矩的要求[7-8]。模糊逻辑可以有多个输入参数,并按照一定的法则生成多种模糊规则。模糊控制器的输入参数一般为道路总的需求转矩Tt和电池状态SOC。
随着GPS和现代交通技术日益广泛的应用,出发前行程距离也可以作为一个已知条件,再考虑到PHEV电池容量大的特点,工况运行结束既能最大程度地利用电池容量,又能保持发动机工作在高效区域,所以本文将出行工况的行驶里程作为模糊控制器的输入条件,如图2所示,模糊控制器有3个输入变量,1个输出变量。电池SOC、出行距离以及由车辆当前速度和驾驶员指令得到的车辆需求转矩作为输入,电机转矩分配系数作为输出。

图2 模糊逻辑控制器
2.1 输入量模糊化
输入变量车辆需求转矩Tt的论域为[0,Te-max]。当车辆需求转矩大于发动机所能提供的最大转矩Te-max时,发动机工作在最大转矩曲线;当车辆需求转矩小于0时,采用制动控制策略,发动机关闭,回收制动能量给电池充电。根据发动机的效率图,把车辆需求转矩分成5个模糊子集,并归一化。
根据电池的效率曲线,把电池的SOC也分为5个模糊子集。出行距离对PHEV的影响很大,如果距离小于纯电动续驶里程,显然纯电动模式是最优的。本文考虑了超过纯电动续驶里程的情形,把输入的范围设为[40,160],单位为km,也将其分为5个模糊子集。
将精确量转矩输入[0,Te-max]转化到 [0,1]区间的公式为:

将距离输入[40,160]转换到[0,1]区间的公式为:

输入变量SOC的论域为[0,1]。模糊逻辑控制器的输出变量为λ,λ为电机提供转矩Tm占需求转矩的比值,取值范围为[-0.5,1.0],Tm=λTreq。本文将SOC的5个模糊子集以{TL,L,M,H,TH}表示{太低,低,中,高,太高};Tt、距离D和λ的5个模糊子集以{TS,S,M,B,TB}表示{太小,小,中,大,太大}。
2.2 隶属函数构建
隶属函数是模糊控制应用于实际问题的基础,正确构造隶属函数是用好模糊控制器的关键。目前确定隶属函数还没有一套成熟有效的方法,大多数系统的隶属函数仍然停留在依靠经验确定,然后通过试验或计算机模拟得到反馈信息进行修正。确定隶属函数的方法主要有模糊统计法、专家经验法、二元对比排序法和典型函数法等。典型函数法是指选用某些典型函数作为隶属函数,常见的有三角形、梯形、钟形和高斯型等。选择隶属函数时要遵循论域中的每个点应该至少属于1个隶属函数的区域且同时一般不超过2个隶属函数的区域;对同一点不能有2个隶属函数同时达到最大值;重叠部分的任何点的隶属函数的和应该小于1。
本文选用钟型函数和三角形函数相结合来表示输入变量和输出变量,输入变量和输出变量的隶属函数如图3所示。

图3 输入变量和输出变量的隶属函数
2.3 规则库的设计
模糊规则是模糊控制器的重要组成部分,它的数量与模糊子集的划分有关,划分越细,规则条数就越多。在设计模糊规则时,必须考虑控制规则的完备性、交叉性和一致性[9-10]。对于任意给定的输入均能找到相应的规则起作用,而且不能存在相互矛盾的规则。
本文设计的原则是电池能量正好在行程终点耗尽,根据出行距离、转矩需求和电池SOC,建立转矩分配的控制规则,比如转矩需求较小,出行路程距离较短,电池SOC很高,这时电机要提供较大转矩。设计的控制器有3个输入变量,每个变量有5个语言值。经过多次调试,最终确定的模糊控制规则为:

3 仿真结果与分析
为了评价不同行驶距离下模糊逻辑控制策略效果,分别对美国环保署制订的城市道路循环UDDS(Urban Dynamometer Driving Schedule)、高速公路燃油经济性测试循环HWFET(Highway Fuel Economy)进行仿真。不同的行驶距离是通过重复UDDS和HWFET工况来实现的,本文采用8个连续UDDS工况和10个连续UDDS工况、4个连续HWFET工况和6个连续HWFET工况来仿真。选择的发动机为2.4 L排气量,最大功率为127 k W,最大转矩为220 N·m,电机采用永磁同步电机,最大功率为58 k W,最大转矩为220 N·m;蓄电池系统采用锂离子电池,电池组容量9.8 k W·h,额定电压300 V,质量180 kg。整车主要参数见表1所列。
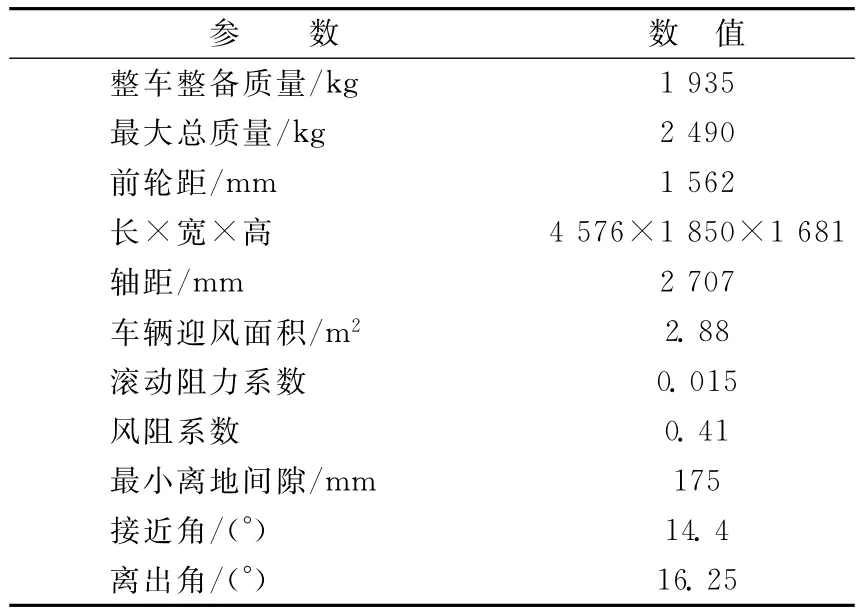
表1 整车参数
在8个连续UDDS和10个连续UDDS工况下,距离分别为96 km和120 km,电池SOC变化情况如图4a所示。在4个连续HWFET和6个连续HWFET工况下,距离分别为66 km和99 km,电池SOC变化情况如图4b所示。初始SOC为1.0,目标SOC设为0.3,从图4可以看出,在不同行驶工况类型和不同行驶距离下,通过模糊控制器自适应控制,电池能量基本都能在接近行程终点时耗尽,达到了控制策略设计的目标,体现了控制策略具有很好的鲁棒性。
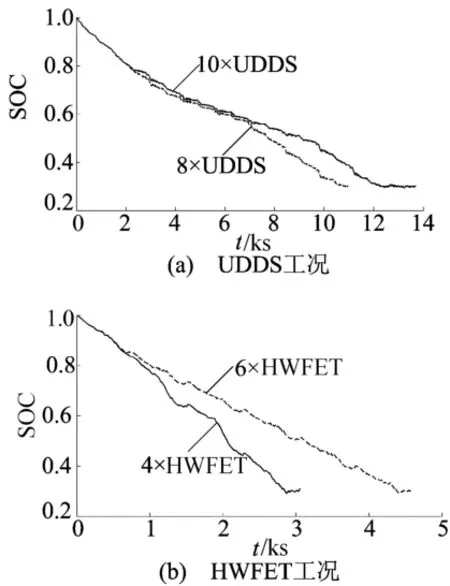
图4 不同距离和工况下电池SOC变化情况
模糊控制策略的目的是要实现发动机和电动机转矩的合理分配,并保持电池SOC在行程终点时达到目标值。在HWFET循环工况下,对发动机工作点进行了仿真分析,模糊控制策略下发动机工作点的分布情况如图5所示。由图5可以看出,模糊逻辑控制策略在全程中都通过电机来调节发动机的工作点,在高效区发动机的工作点比较密集。
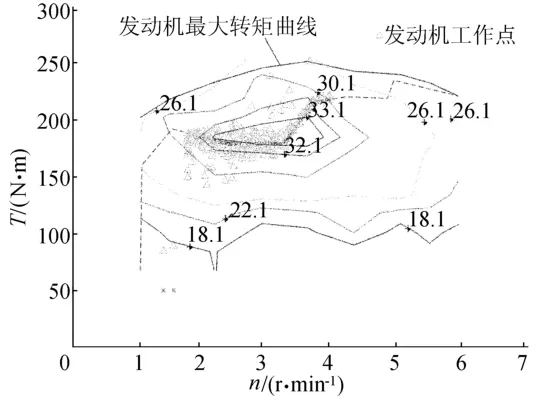
图5 模糊逻辑控制策略下发动机工作点
4 结束语
本文应用模糊逻辑技术,根据PHEV的特点,建立了以车辆需求转矩、电池SOC和路况行驶里程为输入,以电机转矩指令为输出的模糊控制器。在此仿真模型平台上对模糊逻辑控制策略进行了仿真试验。仿真结果表明,在不同行驶距离和行驶工况下,模糊逻辑控制策略都能针对具体工况进行自适应调整,合理分配电池能量,使发动机工作在高效区域,取得较好的燃油经济性,并能很好地控制电池SOC变化。
[1]Zhang Bingzhan,Mi C.Charge depleting control strategies and fuel optimization of blended-mode plug-in hybrid electric vehicles[J].IEEE Transactions on Vehicle Technology,2011,60(4):1516-1525.
[2]李兴虎.电动汽车概论[M].北京:北京理工大学出版社,2005:22-24.
[3]钱立军,赵 韩,鲁付俊.混合动力汽车传动系结构分析[J].合 肥 工 业 大 学 学 报:自 然 科 学 版,2003,26(6):1121-1126.
[4]尹安东,冯 瑞,赵 韩.基于超级电容的混合动力客车动力系统设计[J].合肥工业大学学报:自然科学版,2011,34(4):481-484.
[5]钱立军,赵 韩,吴伟岸.并联混合动力电动汽车控制策略优化研究[J].中国机械工程,2004,15(9):251-254.
[6]王保华,王伟明.并联混合动力汽车控制策略比较研究[J].系统仿真学报,2006,18(2):401-404.
[7]Schouten N J,Salman M A,Kheir N A.Fuzzy logic control for parallel hybrid vehicles[J].IEEE Transactions on Control Systems Technology,2002,10(3):460-468.
[8]席爱民.模糊控制技术[M].西安:西安电子科技大学出版社,2008:102-108.
[9]资新运,杜常清,张增建,等.混合动力汽车模糊逻辑转矩管理策略仿真[J].武汉理工大学学报:信息与管理工程版,2008,30(4):561-564.
[10]张邦基,于德介,邓元望.基于模糊逻辑的并联式混合动力电动汽车能量控制系统[J].汽车工程,2009,31(6):496-502.
