基于两棱镜模型的盾构引导系统开发与研究
2012-01-17王智
王 智
(青岛市勘察测绘研究院,266032,青岛∥工程师)
目前国内地铁施工中获取盾构机的实时姿态主要采用人工测量手段,耗时且费力,且使用的自动引导系统均是从国外引进,如德国VMT公司的SLS系统及日本的小松系统等。国内一些单位研究的自动引导系统基本都处于试验阶段,且普遍是三棱镜模型。它是基于空间直角坐标转换或根据空间相应特征点距离不变的特性解算方程组来求取盾首盾尾的坐标。当曲率半径比较小时,吊篮上的全站仪会出现不能同时观测到3个棱镜的情形。针对这种情况,提出在盾构机上适当的位置安置2个棱镜和1个双轴倾斜仪来获取盾构机姿态的方法。
开发的两棱镜引导系统的运行流程如下:
(1)在始发井中在盾构机上适当位置焊接2个棱镜,严格测定2个棱镜和盾首盾尾的位置关系,并在盾构机上安置一个电子双轴倾斜仪;
(2)在系统中输入导线点、设计路线等信息,设站后依次测量盾构机上2个棱镜的坐标,同时从双轴倾斜仪中读取盾构机的俯仰角和扭转角;
(3)计算偏差时,首先根据标定数据计算2个棱镜在水平面投影的坐标,并与设计路线比较计算投影点的偏差;
(4)根据读取的俯仰角和扭转角对之前算出的投影点偏差进行改正,得到2个棱镜在轴线上投影点的实际偏差;
(5)根据盾首盾尾和2个棱镜在轴线上投影点的距离关系,由三角形相似原理计算出盾首盾尾的偏差;
(6)由2个棱镜的实测坐标及标定时与首尾的位置关系计算出切口的里程,根据2个棱镜在轴线上投影点的偏差计算方位角偏差。
1 数学模型
如图1所示,O为切口中心,C为盾尾中心,P1P2为盾构机上的测量特征点,其在盾构机轴线OC上的投影点为P01和P02;P1与盾构机轴线OC组成的平面π1与通过OC的竖直平面πv之间的夹角为α1,P2与盾构机轴线OC组成的平面π2与通过OC的竖直平面πv之间的夹角为α2。α1和α2可在初始标定时求得。规定从测站看向盾构,当测量点在盾构机右侧时,夹角为正值;在左侧时,夹角为负值。
首先将测量特征点P1、P2投影到水平面上,得到投影点P′1、P′2的平面坐标。根据此坐标与设计轴线比较,可得到投影点P′1、P′2的相对于设计轴线的偏差I1、I2。

图1 盾构机上测量特征点与盾构机轴线关系图
如图2,此时盾构机的转角为α,则P01、P02的盾构转角平面改正分别为:

将偏差I1、I2分别加上平面改正 ΔI1、ΔI2后即得到P01、P02平面偏差 M1、M2。


图2 盾构机转角改正
再根据CP01、P01P02、P02O之间距离的比例关系,利用相似三角形的原理求出盾构机切口中心、盾尾中心的平面偏差,即得到盾构实际的平面姿态。
如图3所示,根据ΔAEF与ΔAKD相似及图形关系可得:

式中Δ尾平表示盾尾水平偏差。
同理根据ΔAEF与ΔGHF相似可得:

图3 盾首盾尾水平偏差示意图
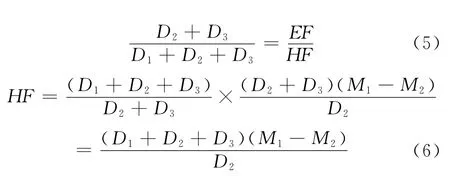
即可求得盾首水平偏差

P1点的盾构转角高程改正为:

式中α为盾构扭转角,无论左转右转,改正值均为正。
根据P1点的高程加上转角引起的高程改正Δh1并归算到盾构轴线上,得到P01点的高程,然后根据双轴倾斜仪读出的盾构机的当前坡度值归算切口中心高程和盾尾中心高程,再与设计的相应里程处切口高程和盾尾高程进行比较,得到切口中心和盾尾中心的高程偏差。
2 系统开发及应用
根据上述数学模型用VC 6.0开发一套盾构自动引导系统。其程序主界面如图4所示:界面左上方显示盾构机的方位角、俯仰角、扭转角偏差,以及盾首盾尾的当前里程、水平偏差、竖直偏差;右上方和右下方界面分别显示的是盾首水平偏差和竖直偏差的历史轨迹。左下方界面4个按钮可以方便对全站仪和倾斜仪进行操作。该界面还可以显示盾构机和设计路线偏差的俯视图。
首先在始发井中盾构机上适当位置焊2个棱镜,在工程坐标系测定2个棱镜及盾首盾尾的三维坐标并把它们录入“配置”下的“TBM-points”中。如图5所示,在 “平曲线”和“竖曲线”中输入设计曲线相关参数,以1m的间隔放样出设计路线的三维坐标;全站仪测站坐标和后视点坐标在“导线点”中录入。

图4 盾构自动引导系统主界面

图5 引导系统相关配置
系统运行时,全站仪自动测量盾构机上的2个棱镜的三维坐标并采集双轴倾斜仪的俯仰角和扭转角,按照上述数学模型计算出盾首和盾尾的水平和竖直偏差并实时显示在系统界面上。
该套系统在苏州地铁1号线广济路至养育巷区间段、上海轨道交通12号线金京路至申江路区间段取得了成功的应用。所需设备主要是1台自动全站仪、1个电子双轴倾斜仪以及盾构机上安置的2个棱镜,操作简单便捷,只需盾构司机在测量时刻点击鼠标即可。在工程应用中与人工测量方法检核的结果说明,该方法具有较好的精度。与三棱镜模型相比,学习测量时只需瞄准2个棱镜,自动测量时也节省了一定的时间,也避免了由于视野夹角过小而造成三棱镜相互混淆的情况。
3 结语
针对目前普遍使用三棱镜模型的盾构自动引导系统,提出基于两棱镜模型的自动引导系统。该系统的数学模型解算过程简单,易于程序实现。采用VC 6.0开发了相应的自动引导系统,使用过程中操作便捷,在工程中取得了成功的应用,避免了三棱镜模型的不足,对实际施工有一定的参考价值。
[1] 金剑锋,王智.罗德里格矩阵在盾构引导系统中的应用研究[J].城市轨道交通研究,2011(3):37.
[2] 李青岳,陈永奇.工程测量学[M].北京:测绘出版社,1995.
[3] 徐然.地铁盾构智能导向系统研究[D].上海:同济大学测量与国土信息工程系,2008.
[4] 陈龙飞,金其坤.工程测量[M].上海:同济大学出版社,1990.
[5] 潘国荣,王穗辉.地铁盾构施工中的若干测量手段及方法[J].测绘通报,2001(1):23.
