水下机器人推力器布置及控制仿真研究*
2012-01-05吴乃龙刘贵杰李思乐
吴乃龙,刘贵杰,2**,徐 萌,李思乐
(1.中国海洋大学工程学院,山东青岛266100;2.上海交通大学海洋工程国家重点实验室,上海200030)
水下机器人推力器布置及控制仿真研究*
吴乃龙1,刘贵杰1,2**,徐 萌1,李思乐1
(1.中国海洋大学工程学院,山东青岛266100;2.上海交通大学海洋工程国家重点实验室,上海200030)
针对自治水下机器人(Autonomous underwater vehicle,AUV)推力器布置和控制仿真的困难性及以往电机仿真难以进行的缺点,提出1种进行多推力器运动仿真的方法,该方法建立的模型克服了推力器推力控制系统不能与电机结合的问题,能较好地反映推力器布置和电机的响应情况,可为AUV的运动控制、布置设计及控制系统开发等提供验证模型。针对流线型AUV CRanger-2的推力器布置情况,在对其建立推力器模型的基础上,利用模型对设定推力下的推力器控制进行仿真。仿真结果表明:该方法能够有效地模拟推力器布置既定情况下的电机运动与推力控制,可为水下机器人控制策略优化提供仿真平台。
自治水下机器人;推力器控制;无刷直流电机;Matlab/Simulink
推力器是水下机器人的重要部件,在水下机器人中常采用的推力器是由驱动电机和螺旋桨组成,其性能的好坏将影响水下机器人的航行和水下自航器的安全。衡量水下机器人推力器性能的指标是水下机器人的推力大小、响应速度和工作的可靠性。水下机器人的运动受推力器布置方式的影响。多推力器布置提供的推力大,便于实现复杂运动的控制,但是它也会增大机器人的自重。少推力器布置,机器人的质量轻,但是推力小,实现复杂运动的控制难度高。确定推力器布置方案,水下机器人推力器的运动性能如何很重要,该方式下水下机器人的推力器控制系统是否可行,就需要验证。验证布置方案和控制系统是否可行的方法,一是物理样机试验,一是建模仿真。物理样机试验具有成本高,可重复性差的缺点,建模仿真具有成本低,实现简单,验证方式多种多样的优点。近年来随着永磁体材料和大功率开关器件的快速发展,大功率推进用永磁无刷直流电机逐渐应用于国内外各种水下机器人中。
本文在确定CRanger-2推力器布置方案的情况下,建立分析该布置方式下的推力器推力分配、推力器控制系统和推力器电机的数学模型的基础上,建立CRanger-2的推力器仿真模型,并对仿真结果进行分析。
1 推力器布置、控制系统及电机模型
为了研究AUV的推力器推力控制问题,确定推力器分配方式,需要建立AUV的物理模型,见图1。
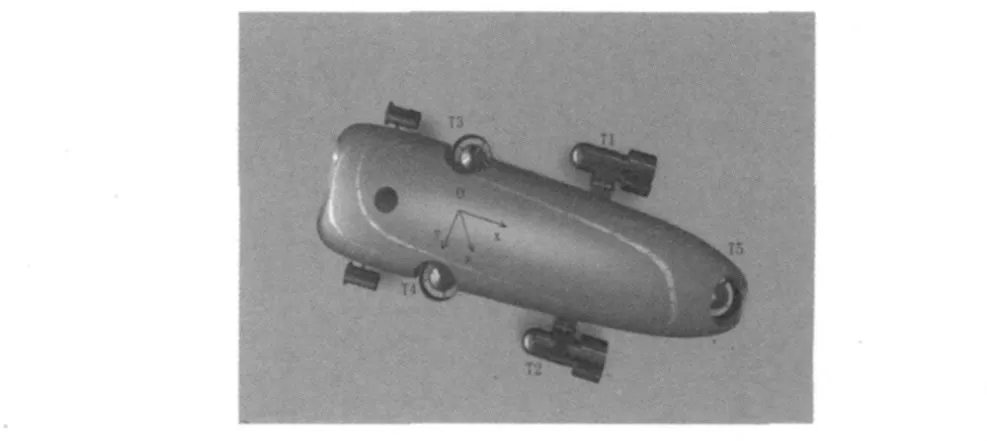
图1 CRanger-2物理模型Fig.1 Physical model of CRanger-2
本文以CRanger-2有导流罩流线型水下机器人为研究对象,其主要参数为:长×宽×高为2.5 m×1.2 m×1.4 m,航速2 kn,最大工作水深1 000 m,质量700 kg(空气中),续航能力8 h。包含5个推进器,分别是艉部的2个主推进器、艉部的1个垂向推进器和艏部的2个垂向推进器。左右对称于纵中剖面,上和下、前和后都不对称。
1.1 AUV推力器分配
为了便于水下机器人的控制,建立描述AUV推力器分配方式。CRanger-2型水下机器人的推力器布置见图1,其垂直推力器为T3,T4,T5,侧向推力器为T1,T2。在该推力器布置方式下,水下机器人可以实现进退、转向、潜浮的运动,其空间推力和力矩计算如下:

式中:推力器的推力T1,T2,T3,T4,T5沿动坐标系正向为正,反之为负;L1为推力器T3、T4推力器之间的距离;L3为推力器T1、T2之间的距离;L4为推力器T5到动坐标系原点的距离;L5为推力器T3、T4所在垂直面到动坐标系原点的距离;L2为推力器T1、T2所在平面到动坐标系原点的距离。
1.2 AUV推力器系统模型
推力器是水下机器人的重要部件,在水下机器人中常采用的推力器是由驱动电机和螺旋桨组成。推力器性能的好坏对控制系统的设计有很大影响,对于闭环系统性能影响最大的是其非线性特性。其次,推力器的效率,推力器的响应特性也是必须考虑的。
在对CRanger-2的设计中,推力器的螺旋桨采用的是定距调速。该推力器产生的推力T表示成:

式中:ρ为水的密度,n为螺旋桨转速(r/s);D为螺旋桨直径;KT为推力系数。
为了产生这一推力,螺旋桨需要输入的力矩为:

式中:KQ为力矩系数;KT、KQ均为螺旋桨几何参数的函数。
螺旋桨的效率为:

式中:vA为螺旋桨的运动速度(严格地说应指螺旋桨相对远处未被螺旋桨搅动的水的速度);η0为敞水效率;J为进速系数。
根据推力器的有关性能,在控制系统的设计中采用简化模型[1],得到推力器的1种推力模型。
其数学描述如下:
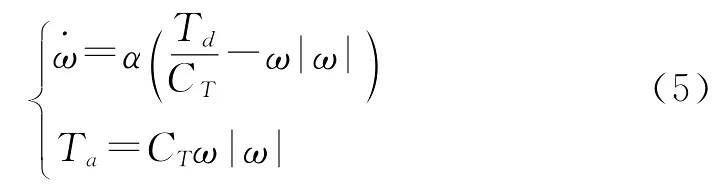
式中:ω为螺旋桨的角速度;CT、α为常数;Td为期望推力;Ta为实际推力。
1.3 永磁无刷直流电机数学模型
在推力器中,往往会采用永磁无刷直流电机来带动螺旋桨旋转,进而达到推进水下机器人运动的目的。永磁无刷直流电机的电枢绕组为三相星形连接的集中整距绕组结构,永磁体的转子采用表面粘贴式磁极结构,该结构的转子磁极具有各向同性,绕组自感和互感不随永磁转子相对电枢转子的位置角改变;电机的功率控制部分采用三相全桥式驱动电路。
在此结构的基础上,作如下假设:(1)三相电枢绕组结构是对称的,每相绕组的自感,绕组之间互感相等,即RA=RB=RC=R,Laa=Lbb=Lcc=L,Lab=Lbc=Lca=M;(2)忽略电机铁心饱和,不计涡流损耗和磁滞损耗;(3)不计电枢反应,气隙磁场分布近似认为是平顶宽度为120(°)的梯形波;(4)忽略齿槽效应,电枢导体连续均匀分布于电枢表面;(5)驱动系统逆变电路的功率管和续流二极管具有理想开关特性。
由此可得永磁无刷直流电机的电压方程为
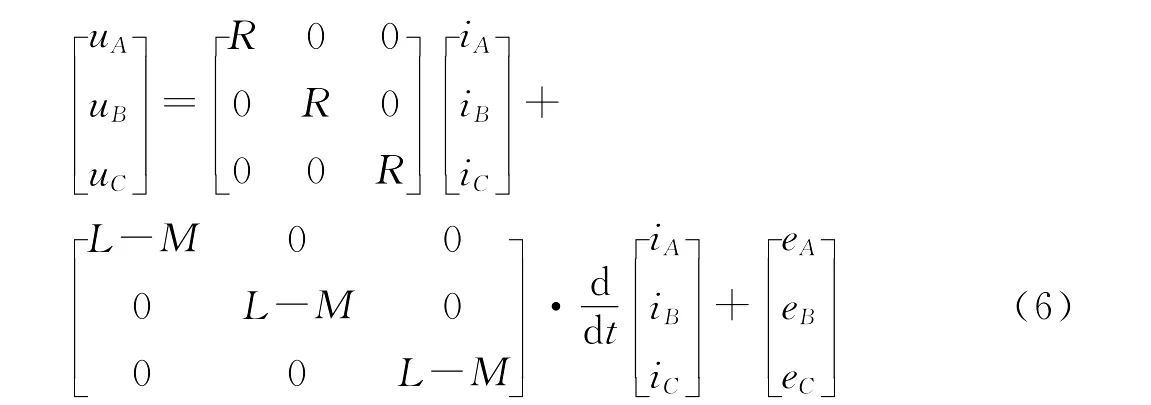
式中:uA,uB,uC为定子相绕组相电压(V);iA,iB,iC为定子相绕组电流(A);eA,eB,eC定子相绕组电动势(V);L为每相绕组的自感(H);M为每两相绕组间的互感(H)。
三相绕组为星形连接,且没有中线,则有

永磁无刷直流电机的电磁转矩是由定子绕组中的电流与转子磁钢产生的磁场相互作用而产生。电机运行时从电源吸收电功率,除小部分转为铜耗和铁耗(文中忽略)外,大部分转化为电磁功率。假设转子的机械损耗和杂散损耗为0,则可得电机的转矩方程

电机的运动方程

式中:Te为电磁转矩;ω为电机机械角速度;TL为负载转矩;J为转子转动惯量;Bv为黏滞摩擦系数。
式(6)、(8)和(9)共同构成了无刷直流电机的微分方程数学模型。
2 仿真模型建立
在Matlb2009的Simulink环境下,利用SimPow-erSystem Toolbox的丰富模块库,在分析CRanger-2推力器分配情况及推力器无刷直流电机数学模型的基础上,提出了建立水下机器人的多推力器模型仿真方法,系统的设计图见图2。
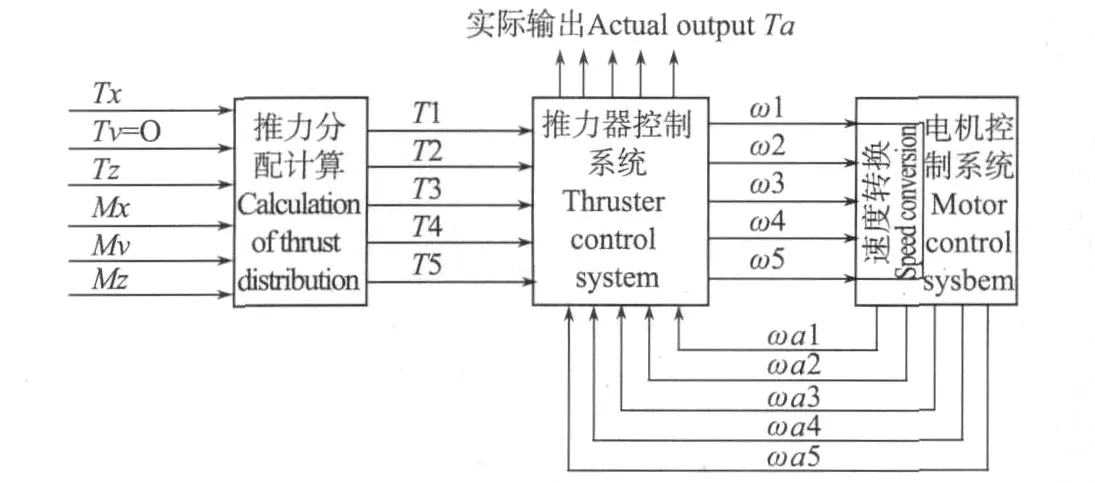
图2 仿真系统框图Fig.2 Simulation system frame
推力器仿真系统由3个模块组成:推力器推力分配计算模块,推力器推力模块,无刷直流电机控制模模块。通过这些模块的有机整合就可以在Matlab/Simulink中搭建出CRanger-2的多推力器控制系统仿真模型。该模型的推力器控制属于闭环控制无刷直流电机采用双闭环转速控制。各功能模块的作用与结构见图3。
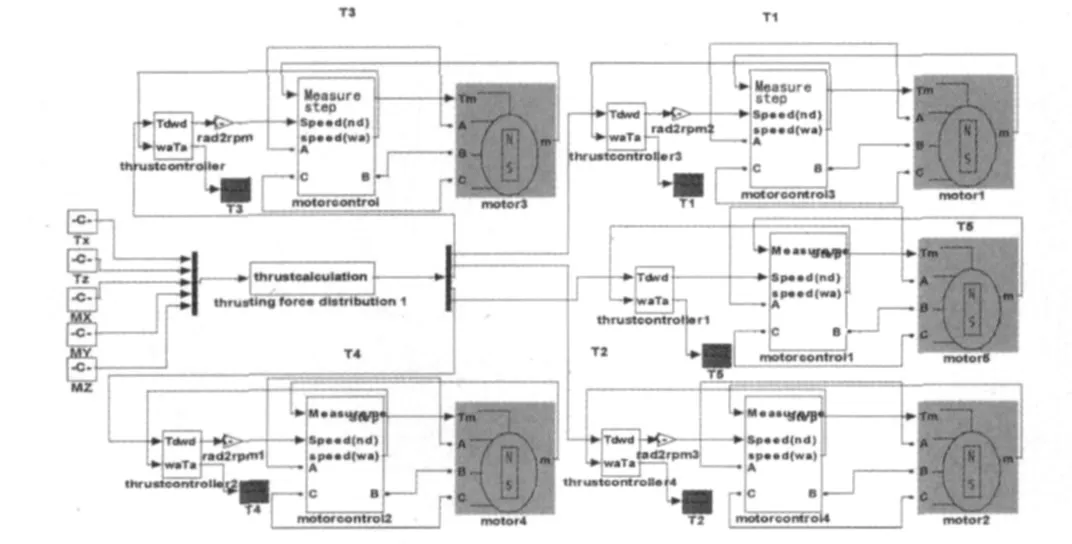
图3 仿真系统模型图Fig.3 Simulation system model
2.1 推力分配模块
推力分配模块的作用是实现将控制系统给的整个AUV运动需要的推力、力矩分配到每个推力器上面,通过设计整个AUV需要的推力、力矩的大小,为该模块提供信号源。推力分配模块通过计算,为推力器控制系统输入期望推力信号。模块的结构框图如图所示。当水下机器人控制系统给出整个机器人运动所需的TX、TY、TZ、MX、MY、MZ时,根据公式(1)建立推力计算模块。由于该型AUV没有横向推进器,故TY=0。推力计算分配这一模块可以通过S函数编程实现。

图4 推力分配计算结构框图Fig.4 Thrust distribution calculation structure diagram
2.2 推力器控制模块
推力器推力控制模块的作用是实现期望推力Td的输入来控制推力器的无刷直流电机,并反馈回来推力器实际的推力。该推力器控制系统通过将期望推力Td输入到推力器控制系统模型中,得出无刷直流电机的转速输入信号ωd。由电机的霍尔位置检测转子位置,确定出电机的实际转速ωa。将电机的实际转速信号反馈到推力器控制系统模型,从而得到推力器的实际推力Ta。
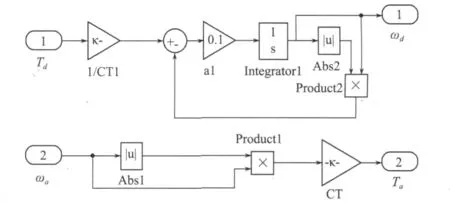
图5 推力器控制系统结构框图Fig.5 Thrust control system structure diagram
2.3 电机控制模块
无刷直流电机控制模块实现的是无刷直流电机的双闭环转速控制,输入的电机转速为nd,输出的电机实际转速为ωa。在控制模型中,采用的电机是Matlab/Simulink的SimPowerSystem的无刷直流电机模块。电机控制模型通过使用PI调节器控制进行转速控制,通过将期望转速输入到电机的控制模块中,根据反馈来的电机转速ωa由PID调节器调节电压源的电压。通过将电机模型测试的信号反馈给电机控制模型,逆变器就可以调节工作模式,给出相应的三相端电压信号,从而实现对Motor模块的控制。
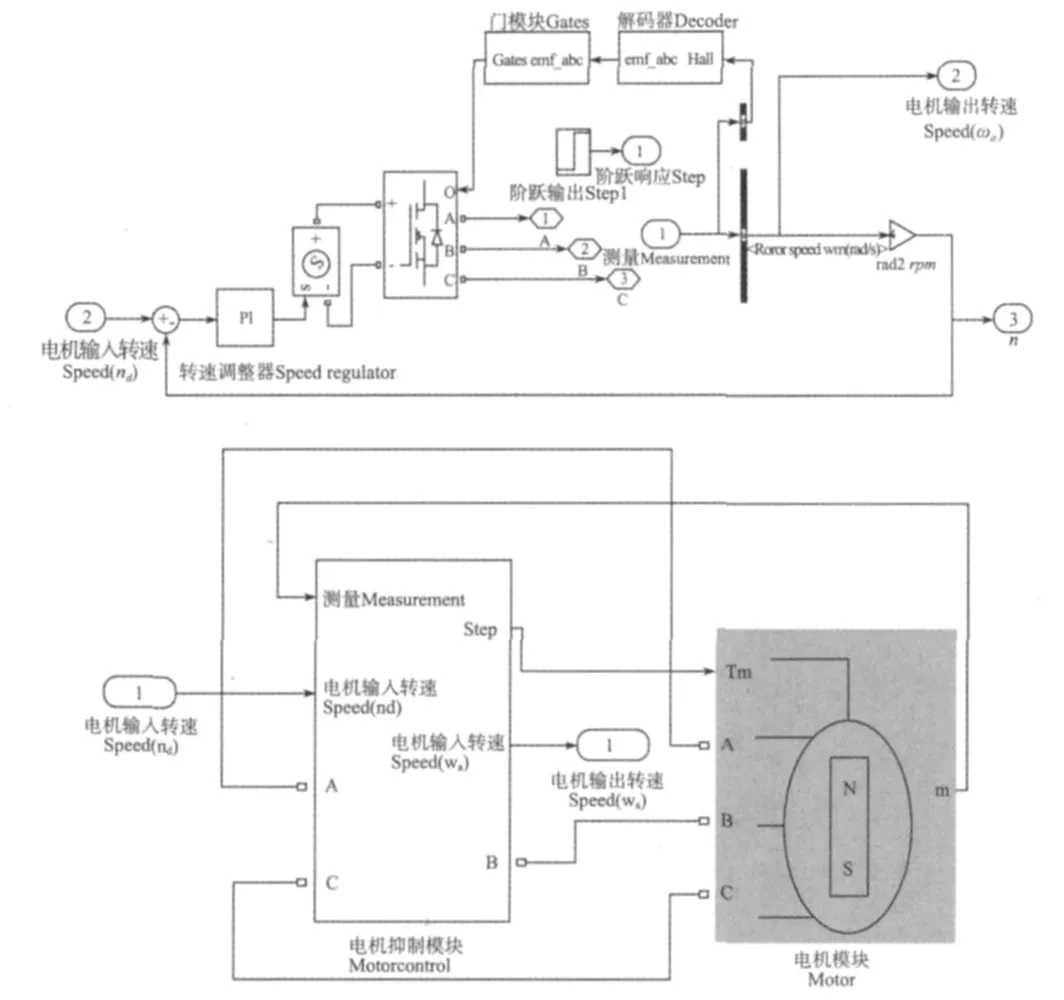
图6 电机控制模型图Fig.6 Motor control model diagram
3 结果分析
本文基于Matlab/Simulink建立了多推力器仿真模型,并就仿真模型进行了设计水下机器人推力下进行多推力器的仿真。仿真中,设定水下机器人各推力器无刷直流电机的参数。推力器T1、T2相同,推力器T3、T4、T5相同。相应的电机参数为:定子相绕组电阻R分别为0.16和0.20Ω,定子相绕组电感L-M分别为0.30和0.48m H,转动惯量J分别为0.16 kg·m2,额定转速nr都为3 000 r/min,极对数np都为8。为了验证所设计的多推力器控制仿真系统模型的静动态性能,系统空载启动,待进入稳定后,在t=0.1s时突然加负载TL=3 N·m,可得系统转速和推力器的实际推力仿真曲线与控制系统响应曲线的对比,以及电机转速曲线和电机转矩响应曲线,如图7~10所示为推力器T3的仿真曲线。
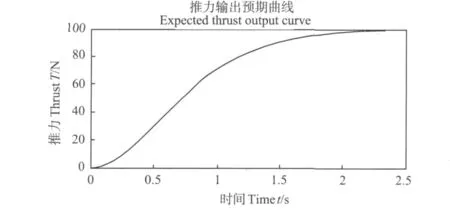
图7 预期推力输出曲线Fig.7 Expected thrust output curve
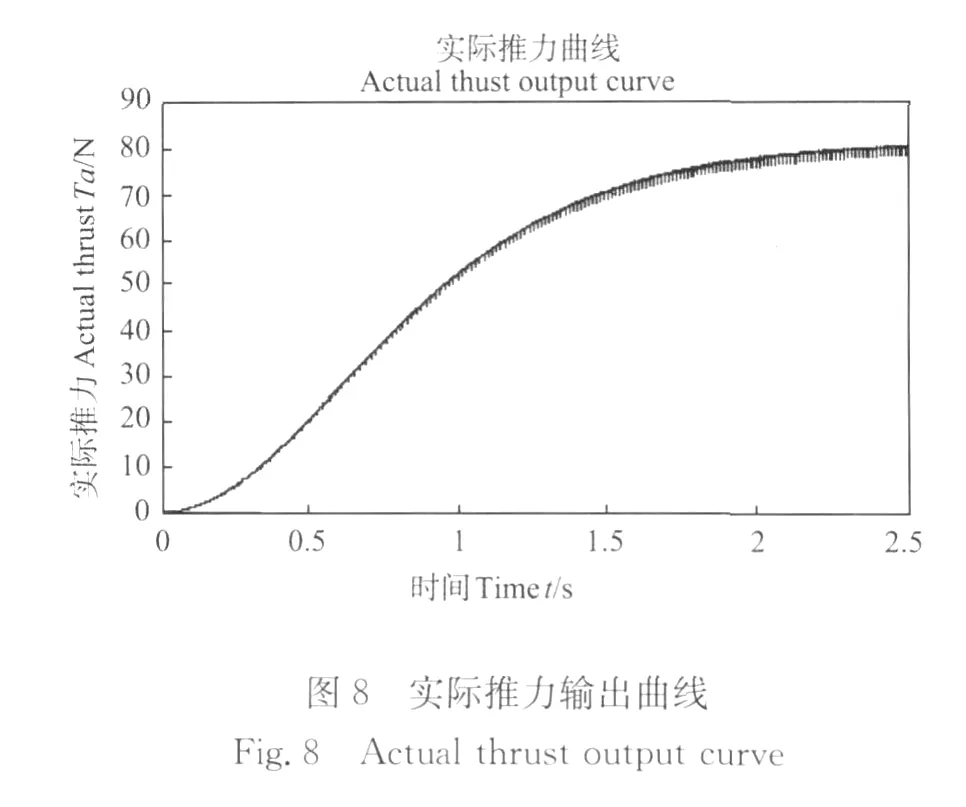

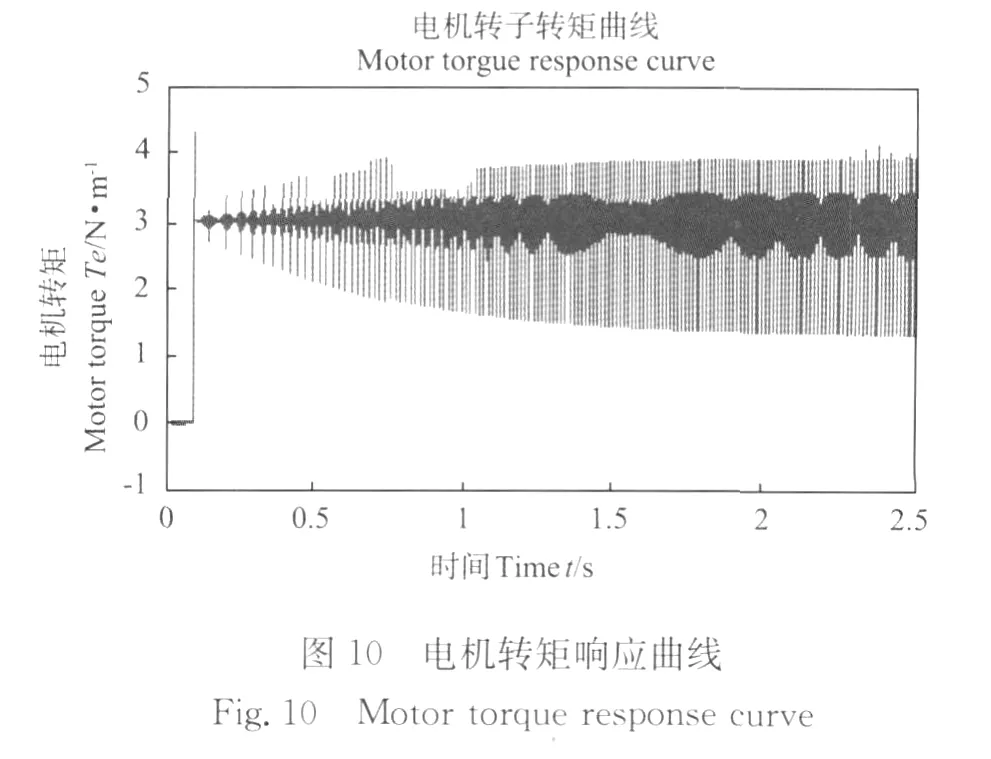
由仿真图形7可以看出推力控制模块工作良好,能够经过调整达到设定的推力值。图8和9是推力器控制系统获得电机实际转速,经过识别模型进而获得的实际推力情况。推力器推力控制效果的好坏与推力控制模型、电机的本身性能都有很大的关系。由图10电机力矩响应具有很好的实时性,但是有较大的抖动,分析认为是由电机的自身的模型和PID调节器的控制参数设定以及推力器推力的控制模型有关。在确定PID参数时,考虑到推力器的快速响应,就要使PID响应要快些,而这种抖动在水下会由于水阻力得到减弱,进而达到推力器控制目的。
总的来看,在水下机器人CRanger-2的推力、力矩设定时,推力器仿真系统快速响应推力信号,实际推力波形与预期推力波形一致,电机的转速的变化也随着推力的变化逐渐达到稳定值。当给电机加上负载时,电机快速的进行响应而达到设定值。仿真结果证明了本文所提出的这种多推力器仿真系统的可行性。
4 结语
本文分析水下机器人运动要求及工作环境的情况,提出1种进行水下机器人多推力器控制仿真建模方法,将该方法应用于Simulink环境下的多推力器仿真模型的设计,采用设定水下机器人推力及力矩对该建模方法进行了仿真,仿真结果表明:实际推力输出与预期推力输出接近,系统运行稳定,具有较好的静动态性能。采用该推力器模型仿真,可以便捷地验证推力器布置下的推力器运行情况,也可方便调试各种控制算法,改进推力器的控制控制策略或模型,因此,它为设计推力器布置方案,验证推力器控制策略的可靠性提供了有效的手段和工具,也为验证水下机器人的运动控制系统提供新的途径。
[1] 蒋新松,封锡盛,王棣棠.水下机器人[M].辽宁:辽宁科学技术出版社,2000:244-328.
[2] 夏亮.无刷直流电机控制系统[M].北京:科学出版社,2009:163-177.
[3] 王成元,夏加宽,杨俊友,等.电机现代控制技术[M].北京:机械工业出版社,2006:116-121.
[4] Serdar Soylu,Bradley J Buckham,Ron P Podhorodeski.A chattering-free slideing mode controller for underwater vehicles with fault tolerant infinity-norm thrust allocation[J].Ocean Engineering,2008,35(16):1647-1659.
[5] Sarkar N,Podder T K,Antonelli G.Fault-accommodating thruster force allocation of an AUV considering thruster redundancy and saturation[J].IEEE Transactions on Robotics and Automation,2002,18(2):223-231.
[6] 纪志成,沈艳霞,姜建国.基于MATLAB无刷直流电机系统仿真建模的新方法[J].系统仿真学报,2003,15(12):1745-1749.
[7] 殷云华,郑宾,郑浩鑫.一种基于MATLAB的无刷直流电机控制系统建模仿真方法[J].系统仿真学报,2008,20(2):293-298.
[8] 张林森,谢顺依,曾双贵,等.推进用永磁对转无刷直流电机的MATLAB仿真[J].电机与控制应用,2010,37(8):1-5.
Arrangement and Simulation Study on AUV Thruster
WU Nai-Long1,LIU Gui-Jie1,2,XU Meng1,LI Si-Le1
(1.College of Engineering,Ocean University of China,Qingdao 266100,China;2.State Key Laboratory of Ocean Engineering,Shanghai Jiao Tong University,Shanghai 200030,China)
With a view to the difficulty of the arrangement and control simulation for autonomous underwater vehicles(AUV)and the drawback of motor simulation difficult to be carried,a simulation method for the motion of multi-thrusters is presented.The model set up in this method overcomes the traditional problem that the control system can not perform without the motor.It can provide a verified model for motion control,arrangement design and development of control system of AUV.Aiming at the arrangement of streamlined AUV CRanger-2 thrusters,this model is used to simulate the control performance of thrusters under thrust setting.Simulation shows that the method can simulate the motion of thrusters effectively when the layout is determined,and can provide a simulation platform for optimization of control strategy.
autonomous underwater vehicles;thruster control;brushless DC motor;Matlab/Simulink
TP391.9
A
1672-5174(2012)04-087-05
国家高技术研究发展计划项目(2009AA120Z330);上海交通大学海洋工程国家重点实验室研究基金项目(1004)资助
2011-05-22;
2011-09-18
吴乃龙(1987-),男,硕士生,研究方向:水下机器人运动控制与仿真。E-mail:hughs1987@hotmail.com
**通讯作者:E-mail:liuguijie@ouc.edu.cn
责任编辑 陈呈超