实验地貌的动态观测装置
2012-01-02赵超徐向舟徐飞龙王书芳
赵超,徐向舟,徐飞龙,王书芳
(1.大连理工大学水利工程学院,116024,辽宁大连;2.贵州乌江水电开发有限责任公司构皮滩电站建设公司,564408,贵州余庆)
精密的观测仪器是试验质量的保证。实验地貌的观测归根到底是对地表糙度的测量,其测量技术可分为接触式测量和非接触式测量2 大类。传统的接触式高程观测方法,如测尺法、测针板法、滚链法等具有设备操作简易、成本低等优势,但同时也存在破坏原始地形、观测精度较低等不足[1-2]。近年来,近景摄影测量技术、激光扫描技术以及超声波测量等非接触式观测技术的发展为土壤侵蚀的定量监测带来了新的研究手段[3]。数字近景摄影测量技术具有较高的观测精度和效率,其设备操作简易且成本相对较低,但观测精度仍需结合传统手段进行率定和校核;点云式激光扫描技术使用范围广、精度高,但设备制作成本高、数据处理量大;超声波地形仪多用于水下地形观测,其应用范围、观测效率和精度有待改进。以上观测手段都不能实现对实验地貌变化过程的实时、动态观测(如沟坡侵蚀过程的动态定量观测)。鉴于此,笔者提出了一种实验地貌的动态观测装置——MX-2010-G 型地貌仪(简称“地貌仪”),该装置能够实现对沟坡微地貌变化进行动态连续的非接触式观测,尤其是能够实现沟坡重力侵蚀的定量观测,这对研究沟坡的侵蚀过程和发生机制具有重要意义。
1 试验装置及原理
MX-2010-G 型地貌仪对实验地貌进行动态观测的基本原理是:激光一字仪与摄像机配合,获取坡面的等值线图;然后在ArcGIS 软件中赋值形成三维立体图,进而可提供坡体的体积、投影面积和各点坐标等参数。该地貌仪由地形定位装置和图像数据采集装置组成,其中地形定位装置由等距激光源、激光定位点斑发射装置和稳压直流电源组成,图像数据采集装置由计算机和带激光瞄准仪的CCD 摄像机组成。地貌仪单机的观测范围为2 m×3 m、0°~90°坡面,多台等距激光源组合可观测较大范围沟坡地貌的动态变化。
地貌仪的工作方法如图1 所示。等距激光源向被测沟坡面投射一组相互平行且等间距的扇形激光平面(多光平面,相邻2 个激光平面的设计间距为30 mm),多光平面与地形表面相交形成一组反应其表面形态特征的等距激光条纹;激光定位点斑发射装置沿垂直于多光平面的方向发射一组相互平行的激光束,该激光束与被测沟坡面相交为一组激光定位点斑;CCD 摄像机主光轴平行于激光瞄准仪轨迹线,通过调整激光瞄准仪保证CCD 摄像机主光轴垂直于多光平面;然后,由计算机指令CCD 摄像机对被测沟坡地貌变化过程进行实时录像,从录像中截取被测沟坡的地形光条纹图像,特别是沟坡侵蚀前、后的地形图像;最后,根据激光定位点的已知相对坐标分别对光条纹图像进行畸变矫正和尺寸率定,通过ArcGIS 软件对光条纹图像进行二值化;根据各面激光之间的已知间距依次对图像中的激光线条进行赋值,形成被测沟坡地形等值线图并建立三维模型,进行相关的计算分析。
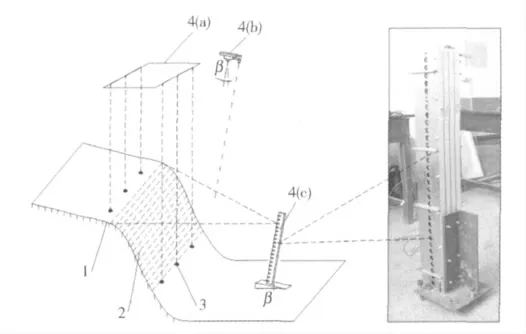
图1 地貌仪工作原理示意图Fig.1 Diagram of the MX-2010-G topography meter
2 试验设计与方法
2.1 试验设计
为检验地貌仪的观测性能,设计了2 个试验场景:室内不同坡度沟坡试验和室外沟坡试验。前者率定不同坡度条件下地貌仪的体积测量精度,后者则主要分析地貌仪的高程测量精度和三维模型精度。
试验a:室内不同坡度沟坡试验。共设计5 组不同坡度沟坡模型,分别为35°、45°、55°、65°和75°,沟坡坡度α 可通过可伸缩支腿任意调整,沟坡模型的表面积为120 cm×200 cm。通过在沟坡面上人为增加和减少体积已知实物来模拟沟坡侵蚀过程,如图2 所示。图2(a)和图2(b)分别代表同一坡度沟坡侵蚀前、后2 种状态,用地貌仪分别对这2种不同状态的沟坡进行扫描观测,得到沟坡侵蚀体积(图2(a)中阴影所示激光线覆盖的突出部分)。然后,用钢卷尺量测模型突出体上相距最远的2 根等距激光线之间的距离L,以确定被测物体的实际体积。对比地貌仪的观测值和实物的实际体积,从而检验地貌仪在不同坡度沟坡地形中的观测精度。

图2 室内沟坡模型试验布置Fig.2 Gully model for the laboratory test
试验b:室外沟坡试验。在室外选取一块沟坡地形,并在其上方搭建一个120 cm×140 cm 的现场水平观测平台(图3),该平台可通过4 个可伸缩支腿来进行调节,以保证平台处于水平面。用细麻线将平台等分成168 个10 cm×10 cm 的小网格,从网格横线与纵线的交点处拉铅垂线,铅垂线与沟坡面的交点处用红色记号笔作标记,并将其作为高程控制点。由于这些高程控制点是由168 个小网格投影所形成,因此,在沟坡面上这些高程控制点构成了水平间距为10 cm×10 cm 的网格测点。先采用水准仪观测坡面上各红色标记点的高程,然后采用地貌仪观测,并形成3 维DEM 图,将现场照片嵌入DEM图中,在ArcGIS 的ArcSence 模块下判读坡面上各红色标记点的坐标。对比分析这2 种量测方法的测量结果。
2.2 沟坡侵蚀定量观测方法
沟坡侵蚀定量观测流程如图4 所示。1)通过视频截图从试验录像中截取沟坡侵蚀前地形图像(P1)和侵蚀后地形图像(P2),并将P1和P2分别导入到Photoshop 软件中;2)通过比较P1和P2,初步确定沟坡侵蚀边界,利用Photoshop 中的“动作录制及播放”功能实现虚拟边墙定界,保证P1和P2中的虚拟边墙为同一边墙,从而避免产生虚拟边墙定界误差;3)将经虚拟边墙处理过的P1和P2分别导入到ArcGIS 软件中,并在Georeferencing 模块支持下对其进行畸形变形矫正和尺寸率定(校准点采用激光定位点斑发射装置发射的激光点斑),得到P3和P4;4)在ArcGIS 软件平台下对P3和P4进行矢量化并生成DEM,分别计算出沟坡侵蚀发生前、后的体积,二者的差值即为沟坡侵蚀量。同理,只需算出重力侵蚀发生前、后瞬间的沟坡体积,二者之差即为当次重力侵蚀量。这种方法观测到的重力侵蚀量中不掺杂水力侵蚀量。

图3 现场水平观测平台Fig.3 Observation platform for the field study
2.3 特征点高程数值精度
运用均方差公式评定特征点高程数值精度。地貌仪观测到的各检查点在水平横轴x 轴方向上的误差为

图4 数据处理流程图Fig.4 Data processing chart

3 结果与分析
3.1 坡度对观测结果的影响
对于不同坡度沟坡模型,地貌仪的观测结果见表1。可以看出,地貌仪测量的体积相对误差可以控制在±10%以内,其中绝对值最大相对误差为9.0%,绝对值最小误差为0.4%。试验结果中,有的相对误差大于0(即地貌仪测量值偏大),有的相对误差小于0(即地貌仪测量值偏小),说明模型坡度对地貌仪的观测精度影响很小。地貌仪观测误差大小主要与数据处理中相片校准的质量以及摄像机拍摄角度出现微小偏差(摄像机视线与激光线平面不严格垂直)等因素有关。

表1 对于不同坡度沟坡的地貌仪观测结果Tab.1 Observation results of the MX-2010-G topography meter for slopes with different gradients
3.2 沟坡地形高程分析
3.2.1 特征点高程分析 采用水准仪和地貌仪观测到的检查点坐标值见表(2)。由式(1)求得的检查点的空间坐标误差分别为σx=0.99 cm,σy=0.84 cm,σz=0.42 cm,满足水土保持模型试验精度要求。另外,水准仪观测本身有误差,尤其对于本研究中地势起伏很大的地形。事实上,地貌仪的观测结果应该比水准仪观测结果更准确。

表2 分别采用水准仪和地貌仪观测到的检查点坐标值对比Tab.2 Data of check points observed by the level and the topography meter,respectively
3.2.2 断面高程分析 在沟坡面上选取6 个断面,每个断面上再选取11 个测点,把2 种量测方法测得的断面测点高程值统一坐标系后,以水准仪测量数据z 为自变量,地貌仪测量数据Z 为因变量,用线性回归的方法对比分析2 种量测方法所得到的结果,其线性回归方程可用下式表达:

式中:a 为Z 轴上的截距,10-2m;b 为回归系数。
从表3 可知,在6 个断面测点系列高程值线性回归分析中,回归系数b 与决定系数R2值都近似等于1,表明运用2 种不同的量测方法所得到的测量值呈高度线性相关。

表3 2 种量测方法观测的断面测点高程比较Tab.3 Comparison of the elevations measured with the two different measurement methods
3.3 沟坡地形三维模型分析
在ArcGIS 9.2 平台支持下,将地貌仪得到的地形等高线数据导入shape 文件,建立地形表面TIN文件,形成沟坡地形三维模型(图5)。从图5(b)可见,沟坡地形三维模型能够较精确地反映出沟坡地形表面的形态特征,如果缩小多光平面间距,还可得到更为精确的沟坡地形表面模型。可知,地貌仪在沟坡地形精细测量和精确建模方面具有较大的应用潜力。

图5 沟坡地形与三维模型对照Fig.5 Comparison of the three-dimensional model and the prototype rill
4 结论
1)地貌仪能够实现对沟坡微地貌变化过程的动态连续观测。
2)地貌仪观测精度较高,适于对实验地貌体积和坐标的观测。
3)基于地貌仪构建的沟坡地貌三维模型能够较精确地反映出沟坡地形表面的形态特征,地貌仪在沟坡地形精细测量和精确建模方面具有较大的应用潜力。
李昕宇、王萍萍、严桥等同学参加了率定试验和数据处理工作,在此表示感谢。
[1] 张鹏,郑粉莉,王彬,等.高精度GPS,三维激光扫描和测针板三种测量技术监测沟蚀过程的对比研究[J].水土保持通报,2008,28(5):11-15
[2] Werner J,Andreas K.Soil surface roughness measurement: methods,applicability,and surface representation[J].Catena,2005,64:174-192
[3] 王书芳,徐向舟,徐飞龙.实验地貌的观测方法研究进展[J].测绘科学,2012(2).优先出版
