基于信号仿真支撑的角度欺骗功能仿真方法*
2012-01-01杨建华冯德军赵锋肖顺平
杨建华,冯德军,赵锋,肖顺平
(国防科技大学电子科学与工程学院,湖南长沙 410073)
0 引言
进行多层次仿真集成,满足多层次、多功能作战训练和研究分析的需求是当前武器系统仿真的重要发展方向[1-2]。不同层次仿真集成面临的主要问题之一是模型可重用性差,如何在保证仿真系统可信度的同时满足系统集成、实时性等要求是武器系统仿真研究的热点问题之一[3-5]。
雷达是现代战场最重要的信息感知设备之一,雷达系统仿真在武器装备研制论证评估、靶场试验与评估、体系对抗作战仿真等领域中发挥着的重要的支撑作用。雷达系统仿真通常分为4个等级:工程级、交战级、任务级、战区/战役级[6]。不同应用层次的仿真对雷达系统仿真实时性要求相差很大,模型精确程度也各不相同。工程级仿真模型通常采用信号形式,这种形式精度较高,但需要耗费较多的计算量和时间。在交战级以上层次的仿真系统中,武器装备平台数量庞大、相互关系复杂,建模仿真的主要矛盾不是武器装备的内部处理,而是装备之间、平台之间、作战部队之间的相互作用关系。在这种情况下,功能仿真成为主要的仿真形式。由于避开了信号仿真所面临的繁琐的处理运算,功能仿真具有实时性好、效率高等优点,其缺点是应用范围有限,无法实现对欺骗干扰、宽带成像与识别等涉及到雷达信号处理技术细节的仿真。如何在满足实时性要求的情况下,适应更多的仿真需求是当前雷达系统仿真中急需解决的关键技术问题之一[7]。本文针对这一难点,提出了一种基于信号仿真支撑的雷达角度欺骗干扰功能仿真方法,该方法不但具有良好的实时性,也具有很好的仿真精度,更重要的是它拓宽了雷达系统功能仿真的应用范围,因而具有良好的应用前景。
1 雷达系统仿真的两种形式
1.1 功能仿真
雷达功能仿真的主要理论基础是雷达距离方程和干扰方程[8]。主要的计算是根据目标与雷达的交会几何关系来计算信号及干扰的功率。由于功能仿真只利用了雷达的功能性质,包含在波形和信号处理机中的详细内容没有涉及,只当作某种系统损耗来处理。功能仿真基本上是对各种信号成分功率的一种描述。雷达距离方程确定这些信号成分的换算关系。对于一个复杂的雷达环境(例如,假设干扰信号是高斯噪声与对数正态噪声的混合),要这样做常常是很困难的。在有些应用场合下,就难以采用功能仿真,例如欺骗干扰仿真、宽带成像雷达系统仿真等。在这些情况下,需要进行信号仿真。
1.2 信号仿真
雷达信号仿真复现了雷达信号的发射、空间传输、反射、杂波与干扰信号叠加、以及在接收机内进行处理的全过程。只要所提供的基本的目标模型和环境模型足够好,就可以使信号仿真的精度足够高[8]。
信号仿真有2个重要特点,一是相参性,二是零中频信号。所谓相参性是指信号仿真不仅能复现信号的幅度,还能复现信号的相位。对于相参处理雷达,如果仿真的信号不具有相参性,则不能仿真利用相位信息提高雷达检测性能的信号处理环节(如动目标显示、动目标检测等)。另一方面,如果在系统仿真中直接仿真射频信号,则要求的数学仿真系统采样率太高,普通计算机是不能满足这样高的运算能力的,况且也完全没有必要这样做,因为零中频信号已经包含了射频信号除载频以外的所有信息,而实际雷达处理射频信号时,总是先进行混频使信号载频下变频到一个可以处理的频率,因此仿真中用零中频替代射频,等于省略了若干混频细节而不影响信号的检测等性能。
2 交叉极化欺骗干扰原理及其信号仿真模型
现代雷达和导弹导引头通常采用单脉冲测角体制,和传统的圆锥扫描雷达相比,单脉冲雷达难以干扰。目前对单脉冲雷达的干扰技术一般分为两类,第一类是利用单脉冲设计和制造中的缺陷,如镜象干扰、边频干扰、交叉极化干扰等;第二类干扰技术为多点源技术,其基本原理是使得到达单脉冲的电磁波到达角失真,这类干扰包括闪烁干扰、编队干扰、地形反弹干扰等[9-12]。本文以交叉极化干扰为例,说明其干扰原理和仿真方法。
交叉极化干扰利用了这样一个事实:当单脉冲雷达收到的干扰信号极化与接收极化相垂直时,单脉冲雷达会产生错误的角度误差信息,使得天线向交叉极化信号的方向偏离,而不是正常的极化信号方向。图1画出了正常极化和交叉极化的和差方向图,从图中可以看出,进行差和比时,交叉极化和共极化方向是相反时,如果交叉极化干扰信号的能量能超过共极化信号,则会使雷达天线向错误的方向偏离。
根据电磁波理论可知,电磁波在接收天线上感应的开路电压可用下式表示:

式中:Ei为接收回波的场矢量;h为天线在该方向上的有效高度矢量。
考虑实际单脉冲天线时,这里把h分解为主极化和交叉极化2个正交分量,相应地接收回波也分解成2个正交的部分。

图1 共极化和交叉极化的和差方向图Fig.1 Sum and difference pattern of the co-polarized and cross-polarized
设天线的主极化方向图为M(θ,φ),交叉极化方向图为C(θ,φ)。需要说明的是主极化和交叉极化在空间都不是固定的,而是空间方位角度的函数。
接收回波中主极化和交叉极化分量分别为S(t)和J(t),不妨称它们分别为有效的信号和有效的干扰。为不至于引起混淆,以下对S(t)和J(t)的来源,作以下说明:S(t)定义为雷达接收到的信号中与天线主极化具有相同极化的分量。其来源主要有两部分:一是目标反射回波,一是由于发射的交叉极化干扰没有严格的正交而提供的有用信号分量,由于相位可能不同,S(t)是二者的矢量合成。J(t)定义为雷达接收到的信号中与天线交叉极化具有相同极化的分量。其来源主要也有两部分:一是由于目标的变极化效应引入的交叉极化,一是由于发射的交叉极化干扰分量,由于相位可能不同,J(t)是二者的矢量合成。但通常前者很小,通常可忽略。考虑交叉极化时天线的接收电压为

令J(t)=KS(t)ejα,式中K为有效干扰和有效信号的幅度比,α为有效干扰相对于有效信号的相移量。则上两式可变为

由前面分析知,归一化的差信号将用于给出角误差信号。如果没有交叉极化,或者说交叉极化小到可以忽略不计,那么利用归一化差方向图

在近似线性的角度鉴别曲线范围内,单脉冲雷达在给出误差角时是利用公式

式中:km为角度鉴别曲线的斜率的倒数,可认为是已知常数。
通常由于偏角很小,可认为M1(θ,φ)+M2(θ,φ)≈常数,故有时只考虑接收到的差信号M1(θ,φ)- M2(θ,φ)。
由于交叉极化的存在,对于给定的K和α,等效的归一化差信号的“方向图”变成了下式:

此时单脉冲雷达在给出误差角时实际上是利用公式
交叉极化角欺骗干扰所利用的原理正是利用式(9)和式(10)的差别达到干扰的目的。从本质上讲,交叉极化干扰利用的是主极化的方向图和交叉极化的方向图之间的不一致性而实施欺骗的。由式(9)和式(10)可以看出,影响交叉极化干扰效果的因素有两个方面:一是被干扰雷达天线的主极化和交叉极化差异,这是干扰方无法预知的;二是干扰信号幅度比以及相位差,这对于干扰方来讲是可以控制的。
3 基于信号仿真支撑的欺骗干扰功能仿真方法
3.1 欺骗干扰功能仿真的基本思想
目前通过信号仿真模拟角度测量及欺骗干扰已相对成熟。以单脉冲测角干扰为例,其仿真处理基本流程是首先根据仿真战情生成目标回波信号和干扰信号,信号迭加后计算单脉冲复比,然后通过角信息变换进行角度鉴别,从而获得测角结果,将干扰条件下获得的测量结果与无干扰条件下的结果比较,最后得到干扰带来的角度误差效果,如图2所示。

图2 角度欺骗干扰信号仿真流程Fig.2 Signal simulation flow chart of angle deception
角度欺骗干扰功能仿真其处理流程与信号仿真是一致的,但并不产生实际的回波信号,其实质是在不同干扰参数调置条件下,通过预先设立的数据库或参数化模型,估计欺骗干扰带来的角度偏差,从而实现欺骗干扰效果仿真。这种仿真是建立在对欺骗干扰信号处理细节的全面理解之上的,所用的关键模型是和参数确立是通过大量的信号仿真来确定的。换言之,角度测量信号处理分析及大量信号仿真是功能仿真的基础,因此本文称之为信号仿真支撑撑的功能仿真方法。图3画出了角度欺骗干扰功能仿真的基本流程。

图3 角度欺骗干扰功能仿真流程Fig.3 Function simulation flow chart of angle deception
3.2 欺骗干扰功能仿真实现流程
从图3可以看出,角度欺骗干扰的关键是建立功能的欺骗干扰效应模型,在设定的参数输入下,该模型能提供干扰条件下的测角误差。影响角度欺骗干所效果的参数很多,对于功能仿真而言,最关心的参数包括干扰信号和回波信号的干信比、干扰信号极化和与精确交叉极化之间的偏差。
普通的反射型天线其交叉极化响应的幅度通常大大低于正常极化响应的幅度。有关抛物面天线的数据指出,交叉极化响应比正常极化响应要低15~30 dB,而双曲线透镜的数据是低30~45 dB。为了实现有效的干扰,交叉极化干扰信号与目标回波信号的功率之比至少要达到20 dB,为保证干扰效果,有时甚到要求达到30~40 dB。另一方面,干扰信号极化与精确的交叉极化之间的任何偏差都会引起正常极化分量。在与正交极化的偏差为0.5°时,这种正常极化分量约为-41.2 dB,偏差为2°时正常极化分量为 -29.1 dB;偏差5°时正常极化量为-21.2 dB。如果正常极化分量大于交叉极化分量,那么干扰信号的作用就相当于一个信标,而不是干扰机[7]。因此,交叉极化干扰信号的正交性要求是非常严格的。正交性越好,则角度欺骗的效果将会越好,对干扰信号的功率要求也会相对更低一些。图4应用式(8)、(10),在主极化和交叉极化幅度响应相差20 dB时,分别画出了干扰信号能量和其极化偏差对测差偏差的影响。

图4 干扰能量和极化偏差对测角精度的影响Fig.4 Influence of jamming energy and polarized departure in angle measurement
由图4可以看出,不同的参数条件下,干扰效果存在较大的差异。总体来说,干信比越大,所造成的测角偏差越大,极化偏差越小,干扰效果也越好。对于功能仿真来说,需要能提供设定干扰参数下的角度误差输出,关键之处在于先进行相应的信号仿真,对其角度误差结果建立数学模型或数据库,供功能仿真调用,这样在功能仿真时可以大大提高运算速度。当然,误差结果模型越精细、支撑数据越丰富,则功能仿真的结果与信号越接近。下面给出功能仿真的实现步骤:
第1步:设定功能仿真的参数范围,包括目标位置、雷达位置、干扰机位置、主极化和交叉极化天线的幅度响应差异、交叉极化干扰信号的极化偏差、干扰信号和回波信号的信干比等;
第2步:根据仿真场景,计算出目标和天线指向的偏差角,然后利用式(8),计算出无干扰条件下天线指向误差角;
第3步:将第一步设定的相关参数代入式(10),分别计算不同偏差角下,不同参数条件下单脉冲雷达给出的干扰条件下的误差角;
第4步:将第2步得到的结果与第3步得到的结果相减,从而得到设定条件下角度指向偏差;
第5步:对不同参数设定下、不同角度位置下得到的角度指向偏差进行曲线拟合或存入相应的数据库,供功能仿真时调用;
第6步:功能仿真时,根据输入参数调用相关模型或数据库,如果参数不能完全对应,则按照最小均方误差原则进行数据平滑或曲线拟合,得到设定条件下的功能角度欺骗干扰输出结果。
4 仿真结果与分析
仿真参数设置如下:主极化和交叉极化幅度响应相差20 dB,干扰信号极化与精确的交叉极化之间的偏差为1°,干扰信号和目标回波强度比分别为25 dB,图5画出了干信比分别为15 dB和25 dB时功能仿真和信号仿真的结果对比。
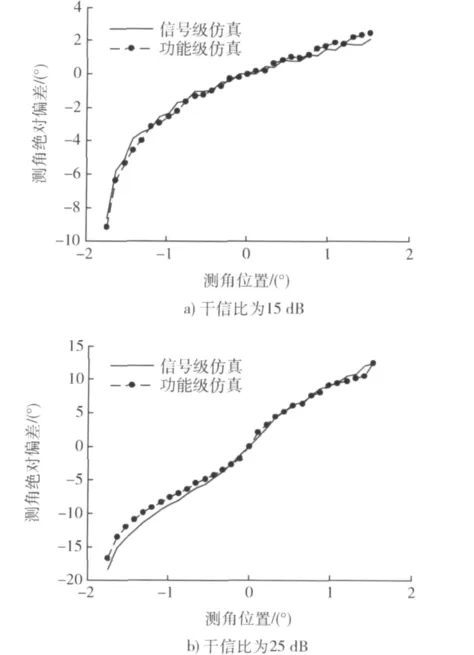
图5 功能仿真和信号仿真结果对比Fig.5 Results contrast of function simulation and signal simulation
从图5的仿真结果可以看出,采用2种仿真方法进行仿真,测角偏差结果保持了一致的“收敛”趋势,两种仿真方法的一致性得到验证。在仿真时也发现两种方法有一定的差别:在进行功能仿真时,如果所调用信号仿真支撑数据过于“稀疏”,则信号仿真与功能仿真之间的测角误差相对较大。以图5所示的干信比15 dB时的仿真为例,在10~20dB之间采用的是4个等间隔的信噪比信号仿真数据支撑,如果将支撑数据减小1/2,则2种层次仿真结果误差平均增加了5%以上。这也说明,如果要保持较高的功能仿真精度,需要的信号仿真数据就要更丰富。
和信号仿真相比,功能仿真的显著优点在于其时效性更好。在相同的计算条件下,表1列出了各进行角度欺骗干扰1 000次2种仿真方法的用时比较。

表1 仿真时间对比Table 1 Simulation time contrast
从表1可以看出,本文仿真方法所需时间远小于信号仿真,因此在对实时性要求较强的高层仿真系统中,本仿真方法将有较大的优势。总的来说,经对比分析有以下结论:
(1)从仿真效果来看,功能仿真能客观地体现出不同仿真参数条件下角度欺骗干扰的效果,而且与信号仿真结果趋势一致,这说明本文所提出方法的可行性;
(2)从仿真的耗费的时间上看,功能仿真的时间消耗远小于信号模型,在运算效率上的显著优势,在复杂系统集成时能提供更好的实时支撑;
(3)仿真精度上看,通过充分的信号仿真数据支撑,功能仿真也能保持较高的仿真精度。从本质上讲,本文提出的这种功能仿真是信号仿真的近似,因此具有较高的可信度。
5 结束语
如何实现逼真度高、实时性好的雷达系统仿真是大型对抗仿真系统构建时需要解决的技术难点之一。本文针对功能仿真无法实现对雷达欺骗干扰仿真的不足,提出了一种基于信号仿真支撑的雷达角度欺骗干扰功能仿真方法,并和信号仿真结果进行了比较。结果表明这种方法不仅具有较好的可信度,而且减小了复杂度,极大地提高了仿真实时性。此外,本文提出的这种方法还可以拓展解决功能仿真的一些难点,如实现对距离拖引欺骗干扰仿真、目标识别仿真等等,因而拓宽了雷达电子战功能仿真的应用范围,本文提出的这种方法可以为高层、复杂系统的仿真提供良好支撑。
[1] 罗成,柏彦奇,桑景瑞,等.多层次作战仿真模型集成[J].科学技术与工程,2006,6(8):1106-1108.
[2] 谈亮,蒋丹丹,许大琴,等.基于 HLA的仿真系统多重表示模型集成[J].系统仿真学报,2009,21(2):317-319.
[3] 杨峰,李群,王维平,等.体系对抗仿真跨层次建模方法论[J].系统仿真学报,2005,17(2):270-274.
[4] Anand Natrajan.Consistency Maintenance in Concurrent Representations[D].USA:Faculty of the School of Engineering and Applied Science at the University of Virginia,January,2000.
[5] YAKOV D,SHIRMAN.Computer Simulation of Aerial Target Radar Scattering,Recognition,Detection and Tracking[M].MA:Artech House,2002.
[6] 施莱赫D C.信息时代的电子战[M].顾耀平,译.成都:信息产业部29所,2000.
[7] 王令敏.基于HLA的雷达系统建模与仿真研究[D].长沙:国防科技大学,2002.
[8] 王国玉,汪连栋.雷达电子战系统数学仿真与评估[M].北京:国防工业出版社,2004.
[9] 王雪松,肖顺平,冯德军,等.现代雷达电子战系统建模与仿真[M].北京:电子工业出版社,2010.
[10] VAKIN S A.电子战基本原理[M].吴汉平,译.北京:电子工业出版社,2004.
[11] 莱罗艾 B范布朗特.应用电子对抗[M].723研究所,译.北京:解放军出版社,1981.
[12] 彭望泽.防空导弹武器系统电子对抗技术[M].北京:中国宇航出版社,2005.
