惯性技术发展及应用需求分析*
2012-01-01宋海凌马溢清
宋海凌,马溢清
(海军装备研究院,北京 1000161)
0 引言
惯性技术是利用牛顿经典力学和近代物理学原理进行运动物体姿态/轨迹测量与控制的应用技术,涉及数学、力学、精密机械、自动控制、电子学、计算机、光学、精密加工工艺、材料等学科[1],主要研究内容包括惯性仪表、惯性系统、惯性导航、惯性制导、惯性测量等。
在国防武器装备技术体系中,惯性技术是天基、空基、海基和陆基机动装备导航定位、制导控制、稳瞄稳像、姿态测量和过载传感的核心技术。惯性仪表是惯性技术的基础,陀螺和加速度计的技术状态和水平是制约惯性技术研究内容的核心。
惯性技术的发展迄今为止已经有100多年的历史。从1908年安修茨研制出世界上第一台摆式陀螺罗经,到目前的基于哥氏效应和萨格奈克效应的微机电陀螺,惯性技术在军民领域都得到了广泛的应用。对陀螺来讲,包括机械式陀螺、激光陀螺、光纤陀螺、挠性陀螺、微机电陀螺在内的不同精度的陀螺在各个领域应用广泛。对加速度计而言,机械悬浮式、机械再平衡式和谐振式、石英挠性加速度计、微机电加速度计等应用都非常广泛。
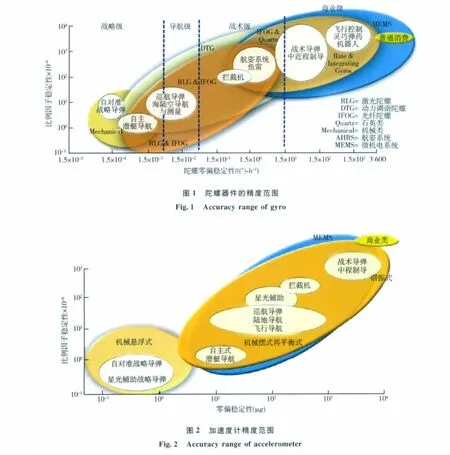
根据惯性仪表精度不同,惯性产品分为战略、导航、战术和商业等4个级别。图1,2分别给出了陀螺和加速度计的精度范围[2]。
1 惯性技术现状及发展趋势
1.1 惯性技术的发展历程
由于陀螺仪是惯性导航的核心部件,因此,可以按各种类型陀螺出现的先后、理论的建立和新型传感器制造技术的出现,将惯性技术的发展划分为4代[1,3]。
第1代惯性技术指1930年以前的惯性技术。基于牛顿经典力学原理,以机械框架式陀螺为典型代表,其特点是陀螺精度低,由其组成的系统结构较为简陋,但对基础理论进行了验证和初步应用,同时为后续惯性技术的发展奠定了基础。
第2代惯性技术开始于20世纪40年代火箭发展的初期,其研究内容从惯性仪表技术发展扩大到惯性导航系统的应用。以机械浮子式陀螺和摆式加速度计为典型代表,其特点是种类多、精度高、系统组成结构复杂。典型产品是美国MX洲际导弹用三浮仪表平台系统,加速度测量误差1×10-7g,陀螺漂移 1.5 ×10-5(°)/h。
第3代惯性技术基于萨格奈克效应,以光学陀螺为典型代表,其特点是反应时间短、动态范围大、可靠性高、环境适应性强、易于维护、使用寿命长。典型产品是美国Sperry公司研制成功MK39系列和MK49型激光陀螺捷联式舰船惯性导航系统,精度范围覆盖了1n mile/8 h至1n mile/72 h。
第4代惯性技术基于哥氏效应和萨格奈克效应,以微机电、微光机电陀螺和加速度计为典型代表,其特点是体积小、成本低、中低精度、环境适应性强、易于大批量生产和产业化。典型产品是美国霍尼韦尔公司的HG1900系列微机电惯测装置产品,陀螺精度达到20(°)/h。
1.2 国外惯性技术发展现状和趋势
1.2.1 发展现状和应用情况[4-6]
国外惯性技术的发展已进入光电和微机电时代。光学陀螺技术已基本成熟,并在各类领域内获得了广泛应用[7-8]。20世纪90年代兴起的微机电惯性技术的研究也初见成效,不但在商业领域内获得成功应用,而且逐渐进入了军事领域。
在航天领域,随着航天技术发展,对装载在卫星、飞船、运载火箭上的惯性器件及系统在精度、使用寿命、体积、功耗等方面的要求日益提高。当前在该领域典型应用的技术产品主要包括光纤陀螺、半球谐振陀螺和部分传统的机电陀螺等,精度范围0.001~0.1(°)/h,主要为载体提供速度、姿态等导航、制导与控制信息,为保持长时间高精度工作,通常与星光敏感器组合使用。
在航空领域,惯性技术的应用经历了液浮、挠性、光学类3个阶段。目前在该领域液浮类惯性器件及系统已很少使用,典型产品主要包括激光陀螺、光纤陀螺,精度范围0.005~0.1(°)/h,主要为载体提供导航与姿态控制信息。
在航海领域,惯性系统由于装备对象不同,相应产品性能存在较大差异。以应用于核潜艇为代表的高精度系统从液浮陀螺平台系统发展到静电陀螺导航仪,并辅助以重力无源导航技术。美军已用激光陀螺惯导系统(AN/WSN-7A)代替静电陀螺导航系统(AN/WSN-3),系统定位精度优于1n mile/14 d。
在制导弹药、无人机等领域,精度较低,因此,低精度为主的小型光学陀螺及系统、石英类、硅类微机电陀螺等得以广泛的应用,陀螺精度范围一般为1 ~100(°)/h。
在导弹领域,由于导弹的性能要求不同,相应的惯性产品性能存在较大差异。例如,战略导弹一般为高精度惯性系统,以传统机电型陀螺及平台惯导系统为主,同时辅助以星光导航技术,陀螺精度范围优于0.001(°)/h。对战术导弹而言,应用在巡航导弹、空空导弹等各类战术导弹的中低等精度系统主要为光学陀螺及捷联惯导系统,陀螺精度范围0.01~10(°)/h;而应用在航空制导炸弹、制导炮弹以低精度系统为主,陀螺精度范围一般为1~100(°)/h。
1.2.2 趋势分析[9-11]
国外惯性技术发展趋势呈现以下特点:
(1)各国惯性技术研究呈现蓬勃发展趋势
美国在大部分惯性技术方面领导了这个世界,并在精度、对准、尺寸、质量、可靠性、成本与数字处理方面正在逐步改进。然而法国、以色列、英国、中国和俄罗斯正在迅速的减小这个差距,俄、中已生产出常规惯性产品,并在激光陀螺和光纤陀螺上拥有初步的生产能力。全球共有22个国家具有开发或应用惯性技术的能力,美国防部将这种能力分为有限能力、部分能力、大部分能力和全部能力4个等级,如表 1[7]所示。

表1 惯性技术能力划分Table 1 Capability division of inertial navigation technology
(2)惯性系统的精度日益提高
以陀螺和加速度计为代表的惯性器件技术是惯性技术中的基础和核心内容,在强大的需求牵引下,国外惯性器件和系统精度日益提高。
激光陀螺技术已经成熟,研究重点为降低成本和小型化。如 Honeywell公司的数字激光陀螺GG1320AN,在陆用战车、民用航空、运载火箭等不同领域得到广泛应用。
光纤陀螺正逐渐成熟,在部分应用中已取代激光陀螺,并朝着更高精度方向发展。如 Northrop Grumman公司研制的以LN-251为代表的光纤捷联惯性系统,导航精度达到0.8n mile/h。
微机电陀螺已在战术级领域得到成功应用。Honeywell公司的HG1900系列微机电惯性测量组合,陀螺零偏稳定性为1~30(°)/h,标度因数稳定性300×10-6。微机电加速度计的精度与机械摆式再平衡加速度计的精度相仿,共同占据于低、中端应用领域,摆式积分陀螺加速度计仍占据高端的应用领域。
高精度的机电陀螺仍然占据着极高精度的应用领域。如战略导弹和核潜艇等武器装备。
(3)惯性系统的成本呈现逐步降低趋势
近年来,国外惯性器件及系统成本持续降低,主要原因有以下几点:
1)新原理、新技术的应用使惯性产品的研制、生产与维护成本不断降低成为可能。在同等精度下,目前广泛应用的光学陀螺、振动陀螺及微机电陀螺与早期的机电式陀螺相比,器件组成数量明显减少,单只器件成本大幅降低。
2)惯性系统的系列化产品。如Northrop Grumman公司以高精度光纤陀螺为重要标志的LN-251惯导系统研制成功后,又相继推出了适应飞机导航的LN-260和适应陆用的LN-270系列化产品,系列化和模块化有效降低了成本。
(4)惯性系统快速反应能力不断增强
惯导系统的准备时间是影响精确制导武器系统快速反应能力的重要指标。限制武器系统反应速度的主要因素是惯导的初始对准方法。动平台下惯性系统的对准技术是解决快速初始对准问题的关键技术。目前,国外大部分惯性产品均具备运动平台对准能力,而且对准时间得到显著的缩短。
(5)小型化、低功耗的惯性器件发展成果显著[7,12]
惯性器件零部件的减少使得惯导系统、惯性测量装置的体积不断减小,功耗不断降低,以光学陀螺为核心的光学惯导系统体积不断变小。如Kearfott公司的T-10三轴激光陀螺仅有高尔夫球大小。
(6)惯性系统环境适应能力强,可靠性高,维修性好
随着光学陀螺、微机电器件的广泛应用,系统的复杂性明显降低,惯导器件及系统环境适应能力大幅度提高,可承受的冲击振动量级更大、工作温度范围更宽,也更加适应精确制导武器的需求。
国外激光惯导系统基本可靠性MTBF值基本已超过1万h,光纤惯导系统MTBF超过2万h。
(7)新型惯性技术不断涌现
自20世纪90年代至今,随着纳米技术、原子光学技术、超导材料技术以及仪器仪表测试技术的发展,以纳米级结构效应、原子干涉技术及超导磁悬浮技术为基础的纳机电系统、激光原子干涉陀螺技术和超导陀螺技术等日益引起广泛关注。
综上所述,经过多年的持续发展,发达国家大部分惯性技术已经进入产品状态,各种惯性器件、仪表的成本得到持续降低,新型惯性技术不断涌现,发展势头迅猛。
1.3 国内发展现状和趋势
在挠性陀螺及系统技术方面,由挠性陀螺组成的平台惯导系统、捷联惯测装置已广泛应用在各种战术、战略导弹、作战飞机、航天飞机以及空间飞行器中,但在动态适应性、陀螺寿命、可靠性等方面与国外相比还存在一定差距。
在激光陀螺及系统技术方面,由激光陀螺组成的捷联惯导系统已广泛应用于海陆空天各种制导武器及武器平台的制导、导航与控制系统。
在导弹武器领域,采用光纤陀螺组成的惯导系统已成功应用于部分精确制导武器。还需在启动时间、环境适应性等方面进一步深入研究。
2 海军武器装备对惯性技术的需求
2.1 海军武器装备对惯性仪表和系统的需要特点
(1)高精度、高动态
超声速巡航导弹、超空泡鱼雷等新型武器装备在动态特性不断提高的同时,自主精确打击能力也在逐步提升,惯性系统需要长时间提供高精度的导航信息,对惯性器件和惯性系统的要求主要体现在高精度、高动态等方面。
(2)自主性及隐蔽性
惯性系统应具有自主、隐蔽、连续、精确和可靠的使用特征,能够保证在各种条件下长期、自主、安全、准确、隐蔽地动作。为确保武器装备不依赖于外界信息支持而独立作战的能力,必须尽量减少电磁辐射。对采用组合导航的系统,也需要保证在外界信息全部中止时,仍然能够满足武器装备对导航信息的最低需求。
(3)更短的准备时间
各类巡航导弹、反舰导弹、反辐射导弹、防空导弹等构成了信息化战争的主战装备,迫切需要提高快速反应和机动作战能力,最快的应用只允许有几秒钟的反应时间,所以要求陀螺能瞬时启动进入工作状态,满足制导与控制系统的需要。
(4)更强的环境适应性
武器装备的使用环境复杂,力学、电磁、温度、空间等条件恶劣,因此惯性系统必须具有很好的环境适应性,能够适应各种高动态环境条件,并应有足够的可靠性。
(5)高可靠性、更长的贮存寿命和性能保持期
武器装备通常都要求惯性系统具有较高的可靠性,降低对使用维护保障的难度。对于长期贮存的武器装备,要求惯性器件能在长期贮存条件下始终保持性能稳定,具有较高的长期稳定性,免标定。
(6)微型化、低功耗
对未来信息化战争可能产生重大影响的新概念武器如动能武器、人工智能武器以及战场上大量应用的中近程战术导弹、制导炸弹、制导炮弹、无人飞机等,宜采用微体积、低功耗的微机电惯性器件及系统。
(7)高性能/价格比
随着武器装备对惯性系统的需求逐步扩大,惯性系统应具有较低的成本、较高的性能/价格比,以适应批量装备的要求。
2.2 海军武器装备对惯性技术的需求分析
海军武器装备特别是战术导弹,对惯性技术产品需求特点为:启动时间短、动态范围大、抗强冲击、中高精度、较小的体积和质量,而且,由于装载量大,对产品的经济性要求较高。
2.2.1 对精度的要求
海军战术导弹对惯性仪表及导航系统的精度要求跟武器系统的使用任务、战术技术性能要求等直接相关。战术级、导航级和战略级在海军武器装备中都有相应的需求。
在常规弹药上加装的制导装置,精度要求多为战术级低端。该精度的惯性仪表在常规制导弹药上有着广阔的应用背景。
无人机将在未来战场发挥非常重要的作用。近年来,作为侦察、干扰和制导武器的发射平台,无人机得到了快速的发展。无人机会成为战术级中低端惯性仪表重要的装载平台。
2.2.2 对环境的适应性和长期稳定性的要求
战术武器装备使用环境复杂,贮存周期长,可靠性要求高,飞行条件下的噪声、过载、温度等条件恶劣,因此,要求惯性系统必须具有很高的性能并具有较好的长期稳定性。
2.2.3 其他要求
武器成本高一直是制约海军精确制导武器大量装备与使用的关键问题之一。对惯性导航系统而言,合理的价格仍然是重点考虑的问题。体积小、质量轻、功耗低等也是海军精确制导武器非常关注的问题。此外,惯性系统的快速反应能力也是武器装备关注的重点。
3 结束语
海军使命任务的不断提高对武器装备的能力提出了更高的要求。为适应作战能力的需要,要求作战平台和作战武器需具备复杂环境下自主导航、中远程精确打击、灵敏及时准确定位的能力,同时,对成本、可靠性、稳定性等提出了更高的要求。
惯性技术是现代精确打击武器实现自主导航、精确打击、准确定位的核心信息源。惯性技术产品作为掌握和控制信息能力的关键因素,其工作的精确性、连续性、完整性、易用性等,对武器装备的精度、机动性、快速性、灵活性和生存能力等都有决定性的影响。
[1] 丁衡高.惯性技术文集[M].北京:国防工业出版社,1994.
[2] Neil Barbour,George Schmidt.Inertial Sensors Technology Trends[J].IEEE,1998,68(4):357-362.
[3] KURITSKY M M,GOLDSTEIN M S,GREENWOOD I A,et al.Inertial Navigation[J].Proceedings of the IEEE,1983,71(10):1156-1176.
[4] Neil Barbour.Inertial Components——Past,Present,and Future[C]∥2001 AIAA Guidance,Navigation and Control Conference.
[5] Sebastieu Clerc,Paolo Martella,Dick Durrant.Development of the European IMU for Space Application[C]∥2009 AIAA Guidance,Navigation and Control Conference.
[6] 方珉,刘星荣.GPS技术、惯性导航技术和组合导航技术在汽车导航中的应用[J].汽车技术,2000,(5):10-12.
[7] 祝彬,郑娟等,美国惯性导航与制导技术的新发展[J].中国宇航,2008,(3):15-16.
[8] Billur Bashan,Hugh F Durrant-Whyte.Inertial Navigation System for Mobile Robots[J].IEEE Transections on Robots and Automation,1995,11(3):307-310.
[9] 韩跃峰,谢建华.滚性导航技术在武装直升机上的应用[J].直升机技术,2001,(4):10-11.
[10] 张炎华,王立端.惯性导航技术的新发展及发展趋势[J].中国造船,2008,49(增刊):134-141.
[11] 徐景硕,周胜明,蒋华君,等.惯性导航系统的发展及其关键技术综述[J].科技信息,2009,(35):865-866.
[12] 高世桥,刘海鹏.微机电系统力学[M],北京:国防工业出版社,1998.
