基于集合同化方法的南海北部最优观测实验
2011-12-28叶冬王瑞文
叶冬,王瑞文
(1.中国科学院大气物理研究所,北京 100029;2.中国科学院研究生院,北京 100049;3.国家气象局国家气象中心,北京 100081)
基于集合同化方法的南海北部最优观测实验
叶冬1,2,王瑞文3
(1.中国科学院大气物理研究所,北京 100029;2.中国科学院研究生院,北京 100049;3.国家气象局国家气象中心,北京 100081)
根据集合同化理论及最优观测方法,应用基于ROMS模式的南海北部区域模拟结果作为集合样本,对该区域的最优观测廓线以及最优观测航次进行了评估和选择。最优观测方法是一种不需要直接同化观测,而通过最小化分析场误差方差理论值来选择最优观测点的方法。最优观测方法根据卡曼滤波理论中协方差矩阵的更新方程,使用一组模式或观测得到的历史样本,寻找使得分析场的不确定性的理论值最小的一个或一组观测位置作为最优观测点,从而达到最优化观测位置的目的。首先应用最优观测方法以及由ROMS模式结果计算出的混合层深度样本选择了一组最优观测廓线,得出的最优观测点主要分布在样本方差较大,流相关较强的区域。在此基础上,应用同一组样本针对南海北部区域实际航次进行了最优化组合和筛选,所选择的最优航次主要集中在汕头、汕尾、台湾浅滩附近。
南海北部;最优观测;集合同化
南海是西北太平洋最大的半封闭式边缘海,总面积约为3.5×106km2,平均深度超过2 000 m。其北部拥有宽广的陆架区,陆架区等深线分布基本与岸线平行,呈东北—西南走向。该海区主要受东亚季风影响,季节变化明显,夏季盛行西南风,风向大致平行于海岸线,冬季则转为东北风[1]。南海北部通过台湾海峡与东海水交换,通过吕宋海峡与西太平洋进行水交换。在南海北部大陆架的东北方,台湾西南存在着台湾浅滩[2]。
针对南海北部的研究有很多的观测航次。2004-2010年,中国科学院南海海洋研究所进行了我国南海北部海洋观测开放航次,期望依靠每年一度的现场调查,获取珠江口与华南近岸海域和南海北部海洋数据的长期积累,并为科学家研究南海北部生态与环境相关的重大科学问题提供现场试验和观测场所[3]。2006-2007年,中国科学院海洋研究所进行了自黄海至南海北部每年一度的中国近海海洋科学考察开放航次,力图获取中国近海这一具有复杂的环境演变特征和强烈海陆相互作用的典型区域的周期性、连续性的数据资料,并逐步创建我国海洋科学考察船共管、共用、专业运行的管理模式[3]。2008年,中国科学院南海海洋研究所进行了南海北部近岸海洋学过程试验SCOPE航次,以探讨粤东上升流区跨陆架输运过程及其生化与环境效应为主要目的。
利用观测资料进行同化研究的也不少,南海的海洋资料同化也得到了不少应用。Wu等[4],Wang等[5]使用牛顿松弛的方法在南海同化了高度计资料。Xiao等[6-7]利用三维变分同化方法同化高度计资料改善了南海温、盐、流的模拟。Gao等[8]同样利用三维变分同化方法同化高度计资料改善了南海中尺度涡的模拟。尹训强等[9]对三维变分同化中最速下降算法进行了改进。Shu等[10]使用最优插值方法同化了卫星海表面温度资料改善南海上层海洋的模拟。然而目前国内尚没有相关工作应用集合同化及最优观测理论对海洋观测进行优化。
如前所述,在南海北部每年都有多个航次设计,而且针对这些航次观测的同化方法也广泛应用到了南海,但是这些观测系统的科学性没有得到合理的评估。在过去几年,利用海洋资料同化方法,观测系统的评估和设计得到了广泛的研究,如Bishop等,Tippett等,Langland等,Khare和Andersion等[11-14]。She[15]利用一个高精度模型和数据同化技术评估波罗的海和北海的SST观测网;Hirschi[16]利用高精度模型来设计一系列观测系统模拟实验并评估观测系统的能力,包括Argo、XBT和一些给定的阵列来监控季节和年际变化。Ballabrera-Poy[17]利用减秩的卡曼滤波来决定热带印度洋的SSH和SST的最优观测阵列。Oke和Schiller[18]利用EOF函数来评估热带印度洋观测阵列的监控季节和年际变化的能力。Sakov和Oke[19]利用一个基于集合的方法来设计最优观测阵列,应用到热带印度洋。
观测阵列的选择和优化方案可以显著地提高海洋观测的效率,减少观测成本,并在观测实施之前有计划的将观测与模式结合起来。然而在国内,这方面的工作还处于空白阶段,尚没有相关的文献发表。本文将采用与Sakov和Oke[19]类似的,基于样本集合的最优观测方法,对南海北部的观测系统的构建进行分析和优化,旨在为合理设计南海北部的观测系统提供一些参考。
1 最优观测方法和模式结果
1.1 最优观测方法基本原理
本文使用的方案依据Sakov和Oke[19]所提出的最优观测方法。假设有状态向量xn×1,x的不确定性用背景误差协方差矩阵Pb来表示,经过同化观测数据后,x的不确定性用分析误差协方差矩阵Pa表示,我们希望最优的观测矩阵Hopt能够最小化分析场的不确定性:

根据卡曼滤波理论,Pa可以由协方差矩阵更新方程得到:

假设同化k个观测,则Hk×n为观测矩阵,Rk×k为观测误差协方差矩阵,I为单位矩阵。我们希望得到的最优观测能够最小化Pa的秩,根据trace(AB)=trace(BA),则式(1)、(2)为:
(3)式可以包括多种观测和多个观测点,我们讨论一个简单的情况,即针对一种观测变量的一个观测数据,(3)式可以转化为:
(4)式通过对所有观测点的计算,寻找到一个最优的观测点,使得Pa最小。接着在此Pa情况下,同样方法,找到第2个最优观测点,依次类推,找到若干个最优观测点。
在实际操作中,P并不容易求,可以用集合样本来求P:

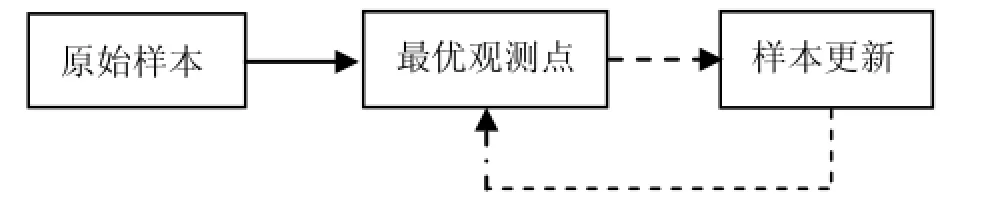
图 1 最优观测计算示意图(虚线箭头表示最优计算)Fig.1 Schematic diagram depicting the serial calculation of an optimal observation array (The dashed arrows represent optimal calculations)
1.2 南海北部模式设置
本文采用Regional Ocean Modeling System(简称为ROMS)作为同化系统模块,ROMS是三维非线性的斜压原始方程模式,由Ruter University与UCLA两校共同开发完成,垂向使用随地型的坐标,水平方向使用曲线正交坐标[20]。模式的区域从西南端15.99oN,108.17oE到东北端25.81oN,119.54oE,中心主轴沿正东方向逆时针旋转23oN,水平曲线正交网格(x,y),取(450,140)的矩阵,水平网格分辨率约为3 km。垂向使用随底的s坐标,θ=2.5,为了得到表面和底面较高的分辨率,垂向取30层,垂向网格分辨率,在近岸小于1 m,在远岸也小于10 m。水深数据来自National Geophysical Data Center(USA的ETOP02(1/30o)),最小水深设置为5 m,平滑地形以减小截断误差。模式运行时间为2008年3月1日至2008年7月31日,模式为热启动。外模时间步长为30 s,内模时间步长为 600 s。模式的强迫场使用blended的风场,空间分辨率为0.25o,每6 h一次的数据,该混合风场由ECMWF的全球0.25o的再分析资料混合两个卫星SSM/I(DMSP F13,F14)和SeaWinds(QuickSCAT)得到。其他强迫场,表面压强,表面温度,相对湿度,降雨,太阳短波辐射,净长波辐射,云覆盖率,使用NCEP的6 h一次的数据,空间分辨率为1o×1o。径流采用珠江冲淡水,每天1次的实测流量。模式的初始场和边界条件均使用法国CNES的全球模式数据mercator数据[21]。
2 结果分析
2.1 模式样本平均结果
按照本文第1部分介绍的最优观测方法,本文采用混合层深度为指标,取历史样本4月20日到7月29日的共100 d的日平均数据组成样本。首先来看其平均的温度和流场图,从图2看出,南海北部该段时间的平均流场主要以沿岸东向流为主,在珠江口,沿岸流场几乎平行于海岸线向东流动,受局地地形的影响,北部沿岸流在珠江口东部区域开始加速,但当它在汕尾东部宽广大陆架区时,流场转向外海方向,在116oE附近发生明显的往外海的偏转,并绕台湾浅滩分成两支流,一支往东北方向进入台湾海峡,一支往东方向流向东边界。相对弱的向南部分的流沿等深线往东南向流,而相对强的向东北流继续平行于岸线流动。
图2模拟的SST表明模式能较好地模拟出南海北部该段时间的上升流。沿岸的冷水从珠江口东面一直延伸到台湾海峡,其强度不断增强。夏季南海北部上升流的温度最低值区域位于汕头近岸(116.5oE,23oN),其温度低于26oC。从汕头往东,上升流的强度变弱,并且随着流场在116oE开始往外海扩展。该段时间南海北部盛行西南季风,由Ekman理论,近岸的海水离岸运动,远岸的底下的水上升来补充,在近岸形成上升流。
2.2 最优观测实验结果
最优观测点:根据第1部分介绍的最优观测方法,模拟出了10个最优观测点(见图3)。图3的等值线代表以混合层深度为样本的标准偏差,点序号代表最优观测点的排序。第1个点在汕尾以南0.5个纬度。这主要是由于一方面,该点相对全场也有较大的MDL的标准差;另一方面,此地水深梯度很大(位于等深线收敛的位置),由于地形作用,沿岸流在此地加强[21],而且其处于南海北部沿岸激流的上游区域。由于流依赖的背景误差协方差矩阵,同化该点的观测能较大程度减少整个区域的误差方差。
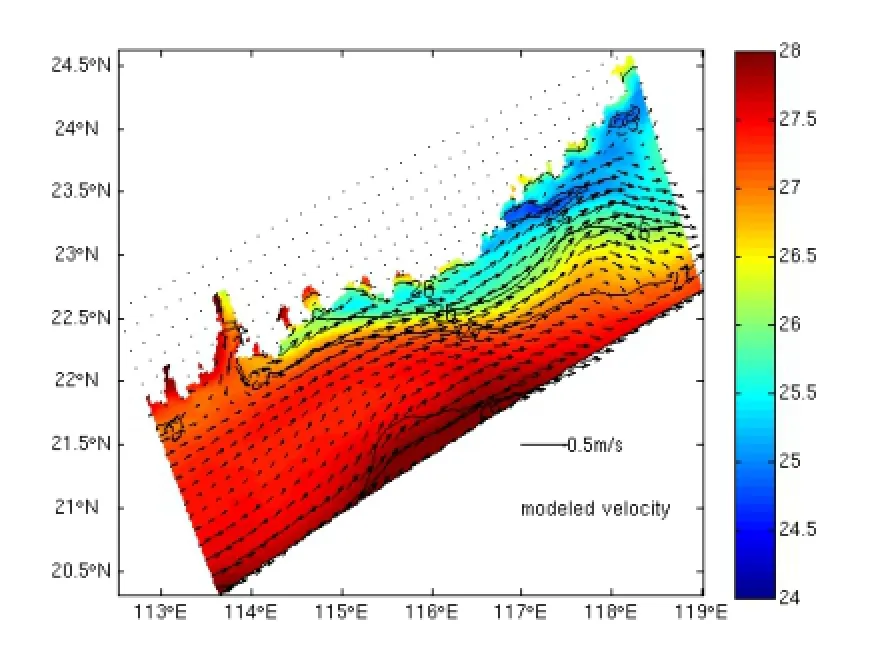
图2 模式样本时间平均的温度场和流场Fig.2 Averaged SST and velocity of the model samples
第2个点在台湾浅滩北部,主要原因是这里的混合层深度较大,从流场看,也有较强的流场,集合方法的特点是背景误差协方差矩阵是从集合样本得到,具有流依赖的特性特征。第3个点同样如此,此地混合层深度相对较大。
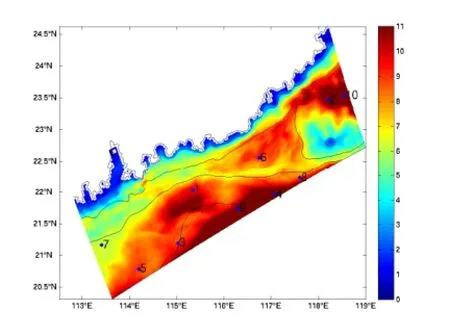
图 3 样本的标准偏差和最优观测点的位置(等值线代表水深10 m,30 m,50 m,100 m)Fig.3 RMSD of samples along with the position of optimal observation (The contour lines represent the water depths of 10 m, 30 m and 50 m, respectively)
在顺序找到每个点,并进行样本更新后,样本的方差减小,该点周围的方差也减小。图4展示了分别同化各个观测点后,更新后的样本的标准偏差。明显看到,同化第1点之后,样本方差明显减小,说明这里改善程度最大。对新的样本,这时标准偏差有两个地方比较明显,一个在台湾浅滩北部,一个在汕尾以南水深等值线隆起处,第2个点落在台湾浅滩北部,第3个点和第4个点落在汕尾以南区域。
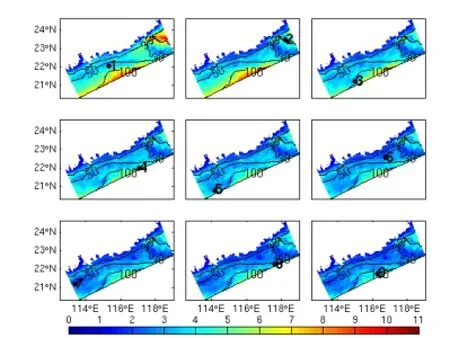
图 4 分别同化各个点后的样本的标准偏差(等值线代表水深10 m,30 m,50 m,100 m)Fig.4 RMSD of samples that assimilate each optimal observation, respectively (The contour lines represent the water depths of 10 m, 30 m and 50 m, respectively)
图5展示的是同化每个点后样本的标准偏差减小的图,横坐标代表同化进去的点,0代表原始样本,纵坐标代表样本的平均标准偏差。明显看出,第一个点改善样本的不确定性最大,第2点次之,第3点再次之,顺序而下,改善的程度越来越小。我们画100个最优观测点的图,可以明显看到这个趋势。
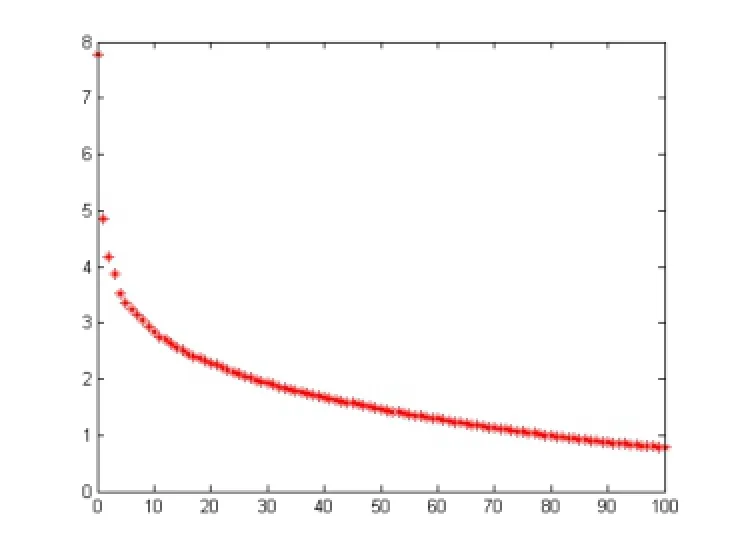
图 5 经过最优观测后的样本的平均标准偏差(x轴代表最优观测的数目,y轴代表样本的平均标准偏差)Fig.5 Averaged-RMSD of samples after optimal observation (x-axis means the number of optimal observations, y-axis means averaged-RMSE of samples)
2.3 设计适合航次的最优设计
前面讲到给定一个样本和一个指标,本文以混合层深度为指标,通过同化方法找到的最优观测点,这样的观测点比较分散,在实际航次设计中不太利于实际操作,在实际的航次中,人们往往是对通过断面走航的方式进行观测,下面的实验也将以断面为研究目标,为研究方便,假设如下:以模式网格垂直于岸的断面为研究对象,准备共找30个最优观测点分布在5个断面上,也即每个断面分布6个观测点,首先找到第1个最优观测点,然后固定该点所在的断面,找其他5个点,这就是固定了第1条断面的6个点,然后找全场第7个观测点,找到该点后,重复上述做法,这样一直找到5个断面(图6)。
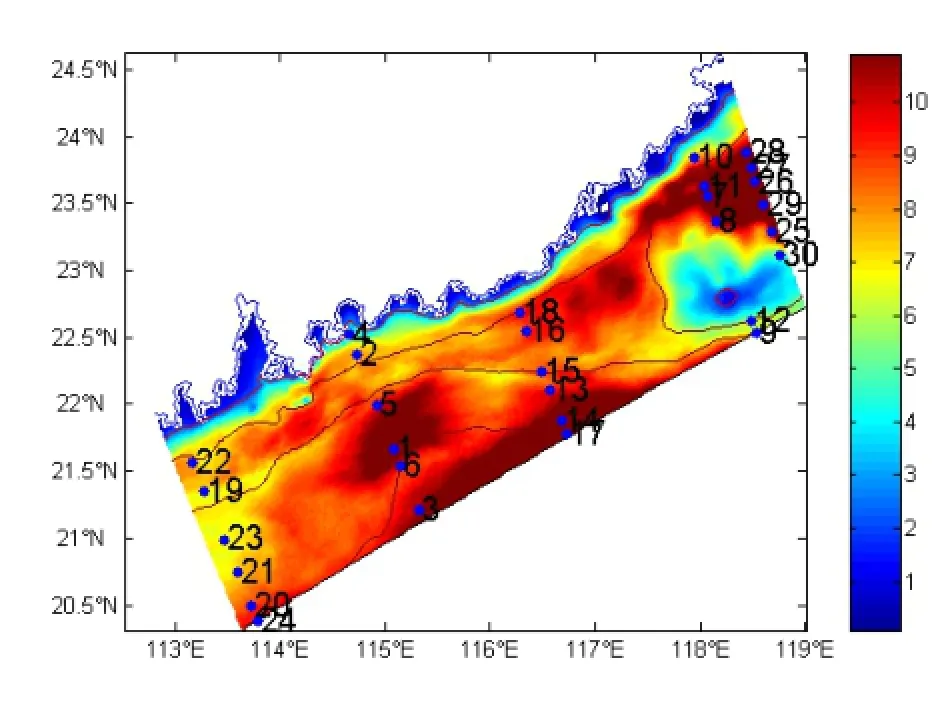
图 6 适合航次的最优观测断面Fig.6 Optimal section suitable for cruises
3 结 论
下面对结果做进一步讨论。重点讨论图3标记为1的站点是最好的动力上的原因是什么,图6中站点2,5,1,6,3组成的断面最好的动力上的原因是什么。这是由于海流总体上是自西向东几乎平行海岸流过南海北部区域(见图2),并且在图6中站点2,5,1,6,3组成的断面处流场向断面中部收敛,然后再发散。这主要是由于地形的作用。因此在该断面中部的观测信息汇聚了上游较大区域所传达的信息。同时该断面中部的观测信息也可以通过平流影响下游较大的海域。这说明了为什么图6中站点2,5,1,6,3组成的断面最好的动力上的原因。至于图3标记为1的站点为什么最好,其原因主要是该站点在上述断面的中部,并且坐落在外陆架和内陆架之间的陡坡上,是上升流的重要通道,因此是对次表层海温变化的敏感点。
本文介绍了利用集合同化方法,根据混合层深度的指标找到了顺序排列的最优观测点,能有效降低模式不确定性。并设计了符合实际航次的断面观测,旨在为今后的航次设计路线或者评估已有的航次路线。当然,本文的方法还是存在一定的不确定性,主要体现在最优观测的选取与模式区域的设置以及模式结果有关,而且用来衡量最优观测的指标(本文选用的是混合层深度)的选取对其结果也会产生一定的影响。
致谢:感谢香港科技大学甘剑平老师、梁琳琳硕士对本文ROMS模式的建立给予的大力支持和帮助!
[1]经志友.南海北部陆架区夏季上升流数值研究 [J].热带海洋报, 2008, 27(3): 1-8.
[2]李立, 吴日升, 孙湘平.中国近海区域水文特征 [C].//苏纪兰.中国近海水文.北京: 海洋出版社, 2005: 272-278.
[3]尹宏, 于建军.我国海洋科学考察开放共享航次的探索与思考[J].科学新闻, 2008, 8: 24-26.
[4]Wu C, Saw P, Chao S-Y.Assimilating altimetric data into a South China Sea model [J].Journal of Geophysical Research, 1999, 104: 29987–30005.
[5]Wang D, Shi P, Yang K, et al.Assimilation experiment of blending TOPEX altimeter data in the South China Sea [J].Oceanologia Et Limnologia Sinica, 2001, 32(1): 101-108.
[6]Xiao X, Wang D, Xu J.The assimilation experiment in the southwestern South China Sea in summer 2000 [J].Chinese Science Bulletin, 2006, 51: 31-37.
[7]Xiao X, Wang D, Yan C, et al.The verification of a three dimension variation data assimilation system in the South China Sea [J].Progress in Natural Science, 2007, 17: 353-361.
[8]Gao S, Wang F, Li M K, et al.Application of altimetry data assimilation on mesoscale eddies simulation [J].Science in China Series D: Earth Sciences, 2008, 51(1): 142-151.
[9]尹训强, 乔方利, 杨永增.变分同化研究中最速下降算法的一个改进 [J].海洋科学进展, 2003, 21(4): 407-412.
[10]Shu Y, Zhu J, Wang D, et al.Performance of four sea surface temperature assimilation schemes in the South China Sea [J].Continaental Shelf Reasearch, 2009, 29, 1489-1501.
[11]Bishop C H, Etherton B J, Majumdar S J.Adaptive sampling with the ensemble transform Kalman Filter.Part I: Theoretical aspects [J].Mon.Wea.Rev.2001, 129: 420-436.
[12]Tippett M K, Anderson J L, Bishop C H, et al.Ensemble square root filters [J].Mon.Wea.Rev, 2003, 131: 1485-1490.
[13]Langland R H.Issues in targeted observing [J].Quart.J.Roy.Meteor.Soc, 2005, 131: 3409-3425.
[14]Kharne S P, Anderson J L.An examination of ensemble filters based adaptive observation methodologies [J].Tellus, 2006, 58: 179–195.
[15]She J, Hoyer J L, Larsen J.Assessment of sea surface temperature observational networks in the Baltic Sea and North Sea [J].J.Mar.Sys, 2007, 65(1-4): 314-335.
[16]Hirschi J, Baehr J, Marotzke J, et al.A monitoring design for the Atlantic meridional overturning circulation [J].Geophys.Res.Lett, 2003, 30, 1413, doi: 10.1029/2002GL016776.
[17]Ballabrera-Poy J, Hackert E, Murtugudde R, et al.An observing system simulation experiment for an optimal moored instrument array in the tropical Indian Ocean [J].J.Climate, 2007, 20, 13, doi: 10.1175/JCLI4149.1
[18]Oke P R, Schiller A.A model-based assessment and design of a tropical Indian Ocean mooring array [J].J.Climate, 2007, 20(13): 3269-3283.
[19]Sakov P, Oke P R.Objective array design: application to the tropical Indian ocean [J].J.Atmos.Ocean.Tech, 2008, 25(5): 794-807.
[20]Shchepetkin A F, McWilliams J C.The Regional Ocean Modeling System: A split-explicit, free-surface, topography following coordinates ocean model [J].Ocean Modelling, 2005, 9: 347-404.
[21]Gan J, Cheung Y Y, Guo X G, et al.Intensified upwelling over a widened shelf in the northeastern South China Sea [J].J.Geophys.Res, 2009, doi: 10.1029/2007JC004660.
Optimal observation experiment in the northern South China Sea based on the ensemble assimilation method
YE Dong1,2, WANG Rui-wen3
(1.Institute of Atmospheric Physics, Chinese Academy of Sciences, Beijing 100029, China; 2.Graduate University of Chinese Academy of Sciences, Beijing 100049, China; 3.National Meteorological Center of China Meteorological Administration, Beijing 100081, China)
In this study, we attempt to estimate and select the optimal observation profiles and observation tracks over the northern South China Sea, using an ensemble Kalman filter based optimized observational scheme and a ROMS regional ocean model for northern part of South China-Sea.Kalman-Filter-based optimal observation scheme is a Bayesian method, which improves observation locations by minimizing the expectation of the root mean square deviation (RMSD) of the analysis field.In another word, this method will minimize the expectation of the uncertainty of the analysis field after assimilating the observations in the selected locations.In this method, only observation locations are required to construct the observation operator, without using the real-time value of each observation.A group of historical snapshots of the model result are served as background ensembles.This method uses the covariance matrix uploading equation in the Kalman-filter theory, to minimize the RMSD of analysis filed.The optimal observation method combines the observation locations with the simulation system, in order to optimize the observation locations and observation strategy before it was conducted.This method can significantly increase the observation efficiency.In this study, the optimal method was used in South China Sea.First, we used the optimal method to select a group of observation locations (profiles) in the northern part of South China Sea.These observation profiles mainly distributed in the areas with high variability and very strong ocean currents.In addition, we used this method to select the best observation tracks.We found that the tracks mainly located around Shantou, Shanwei and the Taiwan shallow shoal.
Northern South China Sea; optimal observation; ensemble assimilation
P731
A
1001-6932(2011)03-0252-06
2011-02-18 ;收修改稿日期:2011-03-08
叶冬 ( 1981- ),男,博士,主要从事海洋资料同化和数值模拟的研究。电子邮箱:yedong@mail.iap.ac.cn。