基于局部相关分析法的ETM+影像修复方法研究
2011-12-28胡炜,刘永学,李满春,陈洁丽,毛鹍
胡 炜,刘 永 学,李 满 春,陈 洁 丽,毛 鹍
基于局部相关分析法的ETM+影像修复方法研究
胡 炜,刘 永 学,李 满 春,陈 洁 丽,毛 鹍
(南京大学地理与海洋科学学院,江苏 南京 210093)
Landsat-7上搭载的专题扫描仪(ETM+)上的扫描行校正器(SLC)在2003年发生故障,导致影像出现坏行,丢失了约25%的数据。由于数据本身仍保持了良好的辐射和几何特性,且同一区域不同时相影像上坏行出现的位置具有随机性,使得使用同一区域不同时相的ETM+影像进行交叉修复成为可能。该文在总结现有修复方法的基础上,提出了一种采用相近时相、相同位置影像对ETM+影像进行修复的方法。首先利用两景影像中的准不变特征点(PIFs),以待修复影像为目标,对待填充影像进行相对辐射校正,消除不同时相影像间由于大气状况等“外源差异”导致的像元亮度值差异。然后运用局部相关分析法对待填充影像进行变换:构建一种同时考虑光谱距离和空间距离的权重系数,根据邻近光谱相似点在两个时相上的变化量对待填充影像进行变换。实验证明,该方法修复效果优于传统的局部回归法。
局部相关分析;影像修复;ETM+
1994年4月美国发射的Landsat-7上搭载了专题扫描仪(ETM+),其空间分辨率为30 m,扫幅宽为185 km。由于其出色的影像质量,Landsat-7的数据被15个地面站所接收,广泛应用于评估与监测、农业和地质调查、全球变化检测、测绘及考古和规划管理等领域[1]。2003年5月31日,Landsat-7 ETM+机载扫描行校正器(Scan Lines Corrector,SLC)突然发生故障,导致获取的图像出现数据重叠和约1/4的数据丢失[2,3]。尽管如此,ETM+数据仍然具有不可替代的价值:一方面,SLC故障不影响传感器的辐射和几何性质[4],在一些领域,由SLC异常造成的影响较小或者在容忍的范围内;另一方面,SLC-off数据中仍然保留着许多有用的信息。通过选择适当的图像处理方法,仍然可以将SLC异常数据成功地运用到很多科学应用领域,如热带雨林监测、农作物定性评估、大面积土地覆盖类型变化以及全球变化监测等。因此,研究如何修复由于SLC故障造成的数据坏行,成为国际遥感研究的热点。本文在探讨已有修复方法的基础上,提出一种对SLC-off数据进行修复的有效方法。
1 ETM+影像修复原理与方法
1.1 常用修复方法
对影像缝隙进行修复的方法可分为两类:一类是直接插值法,即根据影像自身在坏行周边的像元对坏行处进行空间插值,不需要借助外源影像;另一类是利用另外一景或多景ETM+影像对待修复影像的坏行进行填充。直接插值填充法利用缝隙周边的有效像元进行最邻近插值、双线性插值或三次卷积插值等,对坏行部分进行填充,原理简单且较容易实现,但是插值修复的效果很差,存在着明显的填充边界。另外,由于填充像元是根据影像坏行周边的像元亮度值计算得出的,并非地表信息的真实反映,而ETM+影像坏行最大宽度为14个像元,通过这种方法得到的填充像元无法替代真实地物,故修复结果的真实性无法得到保证。
利用外源影像填充是利用位置相同、成像时刻相近的ETM+影像对影像坏行进行填充。外源影像可以是没有发生故障的SLC-on数据,也可以是SLC-off数据。因为扫描仪校正器异常导致的图像坏行是随机分布的,所以利用两景以上的ETM+SLC-off数据完成一幅影像的填充具有可行性[5]。该方法又包括:全景直方图匹配(Global Histogram Match)、局 部 直 方 图 匹 配 (Local Histogram Match)、自适应局部回归(Adaptive Local Regression)等[1,2]。但是这些方法都存在着缺陷:全景直方图匹配法由于将一幅影像整体考虑而忽略了不同位置的空间分异,难以取得好的效果;而局部直方图匹配法和自适应局部回归法均针对一个窗口内的所有像元进行分析,忽略了不同地物在两景影像上的变化模式差异,因此也不能有效地解决问题。
1.2 基于局部相关分析法的ETM+影像修复方法
本文提出的基于局部相关分析法的ETM+影像修复方法包括以下步骤:1)针对t1时刻的待修复影像(以下称为目标影像),选择位置相同、成像时刻相近(两景影像之间的地物类型变化可忽略)的另一景t0时刻的ETM+影像作为待填充影像(以下称源影像),若源影像也为SLC-off数据,则需要考虑两景影像坏行分布的互补性,并以目标影像为基准,对源影像进行几何精校正,误差须保证在0.5个像元以内。2)从源影像上提取与目标影像坏行区域对应的部分,形成填充影像,并从源影像上提取与目标影像有值区域对应的部分,形成匹配影像。3)根据相同地物由匹配影像到目标影像的变换规律,对填充影像进行匹配处理,得到匹配后的填充影像,并将其填充到目标影像。以上步骤中,前两步借助常用的遥感影像处理软件即可实现,而第三步则是决定修复效果的关键。
由于源影像与目标影像时间间隔较小,可以忽略地物类型的变化,故两景影像上对应像元在亮度值上的差异主要来自于两方面:一是大气、光照、传感器状态等成像条件的变化;二是土壤湿度、植被气候等差异导致的地物辐射率变化[6]。对填充影像的匹配处理需要同时消除这两方面的影响。本研究首先通过相对辐射校正消除相同地物(反射率未发生变化)在不同时相遥感影像上辐射亮度的差异,然后逐一遍历填充影像上的像元,根据相似地物的局部变换规律对其进行匹配处理。
相对辐射校正采取基于地物波谱“准”不变特征点(Pseudo-Invariant Features,PIFs)的方法。在两幅影像中选取地物性质没有发生改变的点对(如建筑物、水体等),通过PIFs质量控制方法[7]对PIFs进行筛选。对每个波段,分别建立线性回归方程:

将通过筛选的PIFs带入式(1),得到a、b的值,并据此对源影像进行变换,完成相对辐射校正。此时,两景影像相同位置上像元亮度值的变化可认为是由地物本身反射率发生变化导致,如植被生长状况、土壤含水量等的变化。下一步需要将填充影像上的栅格由t0时刻变换到t1时刻,即对于填充影像上的每个像元,得到其由t0到t1的像元亮度值变化量。
空间上邻近的地物在性质上往往存在密切关联,且相同地物(如某种植被)在不同时相间的光谱性质变化也应类似,基于这种考虑,可将填充影像上一点在t0和t1间的像元亮度值变化量近似地表达为其周边相似像元点变化量的加权和。权重需要同时考虑目标点与邻近相似点的空间距离与光谱距离。填充影像上待变换栅格点(x,y)与一个邻近相似点(xi,yi)的空间距离可以表示为:
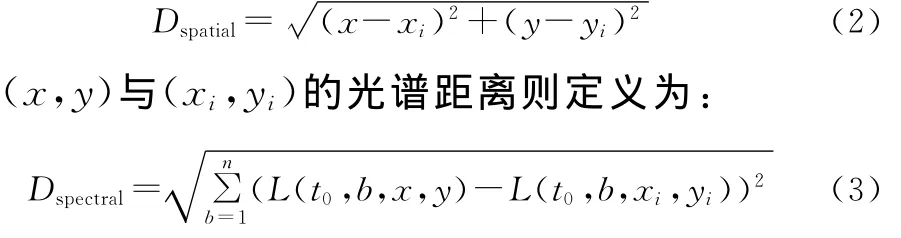
其中:L(t0,b,x,y)、L(t0,b,xi,yi)分别为源影像上两点(x,y)和(xi,yi)在波段b的像元亮度值,n为波段总数。进一步定义综合距离:

邻近相似点权重与空间距离和光谱距离均呈负相关,故可定义为:

式中:m为邻近相似点个数,这里对权重值进行了归一化处理,目的是使邻近相似点像元亮度值的加权和与待变换点具有可比性并能够作为t1时刻处(x,y)的像元亮度值。根据之前的分析,填充影像上(x,y)处b波段的像元亮度值由t0到t1的变化量为邻近相似像元点的加权和,因此填充影像(x,y)处b波段在t1时刻的像元亮度值可表示为[8]:

根据式(6)遍历填充影像上每个波段的所有栅格点即可得到匹配后的填充影像。对于邻近相似像元点的确定,可以通过计算空间距离和光谱距离并设定阈值得到。为了降低算法的时间复杂度,提高效率,这里采用正方形搜索窗口筛选空间邻近点,并设定像元亮度值差异阈值进一步筛选光谱相似点。位于正方形窗口内且与待处理像元每个波段的差值均小于差异阈值的点被选为邻近相似点。初始窗口宽度为20个像元,初始各波段像元亮度值差异阈值为1。若得到的邻近相似像元点数量小于10,则可能由于样本过少导致计算结果不可信,须扩大搜索窗口并增大阈值,每次循环窗口宽度增加10个像元,像元亮度值差异阈值加1,直到获得足够的点为止。算法流程见图1。
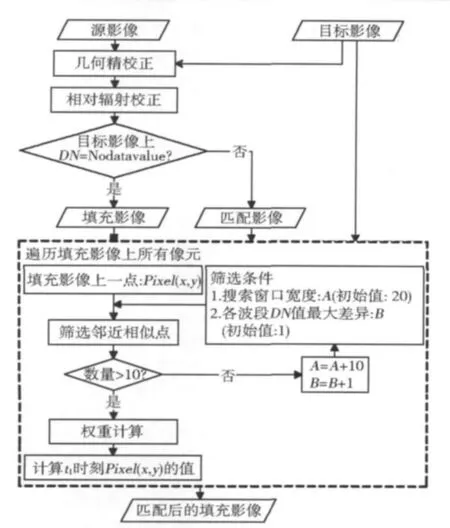
图1 算法流程Fig.1 The algorithm flow chart
2 结果与评价
选取安徽省合肥市两景ETM+影像进行修复实验,轨道号为121/38,成像时间分别为2011-01-09和2010-12-08,实验将前者作为源影像,后者作为待修复的目标影像。待修复波段为空间分辨率30 m的1~5,7波段。
2.1 人工坏行实验
为了能够将修复结果与真实影像进行直接对比,首先在两景影像的无坏行部分(中部区域)上设计人工坏行。分别从两景影像上裁取700×700像元的正方形区域作为实验数据源(图2a、图2b),分别采用传统的局部回归法和本研究所提出的局部相关分析法对目标影像进行修复,修复结果如图2c、图2d。传统局部回归法的结果中存在明显的填充边界,填充像元点与周围像元色调不一致;而局部相关分析法所得到的填充条带与周围像元能够有效融合,修复影像与原始影像在视觉效果上保持一致。

图2 两种修复方法在模拟影像上实验结果对比(R4G3B2)Fig.2 The experiment results of the two restoration approaches(R4G3B2)
为了进一步验证实验结果,分别计算两种修复方式所得的填充影像的均值、中值、方差及与原始影像的协方差,并采用通用影像评价指标(UIQI)[9]评价两种修复方式所得结果与原始影像的相似性(表1),UIQI值越接近1,说明两景影像越相似,填充数据越真实可信。UIQI定义如下式:

式中:x、y分别为待比较的两幅图像;、分别是x、y的方差;σxy是x与y的协方差。
从表1中可以看出,局部相关分析法得到的填充影像与原始影像在均值上非常接近,最大差值出现在第7波段,仅0. 098;中值与原始影像保持一致,UIQI最小为0.864,与原始影像的相似度在各个波段上均高于局部回归法。

表1 两种修复方法所得填充影像与原影像统计对比Table 1 Comparisons of the filler image with the real image of two approaches
2.2 真实坏行影像修复实验
为了验证本研究所提出方法在处理实际坏行时的效果,裁取源影像中的坏行部分,用待填充影像的相应区域进行填充修复,区域大小仍为700×700像元。修复结果(图3)影像中不存在填充边界,对于影像下方的高值区域(建筑物)及右上角的低值区域(水体)均能够得到很好的修复效果,且保持了植被的空间连续性和局部相似性。以上这些特性保证了运用该影像进一步分类处理的准确性和稳定性。
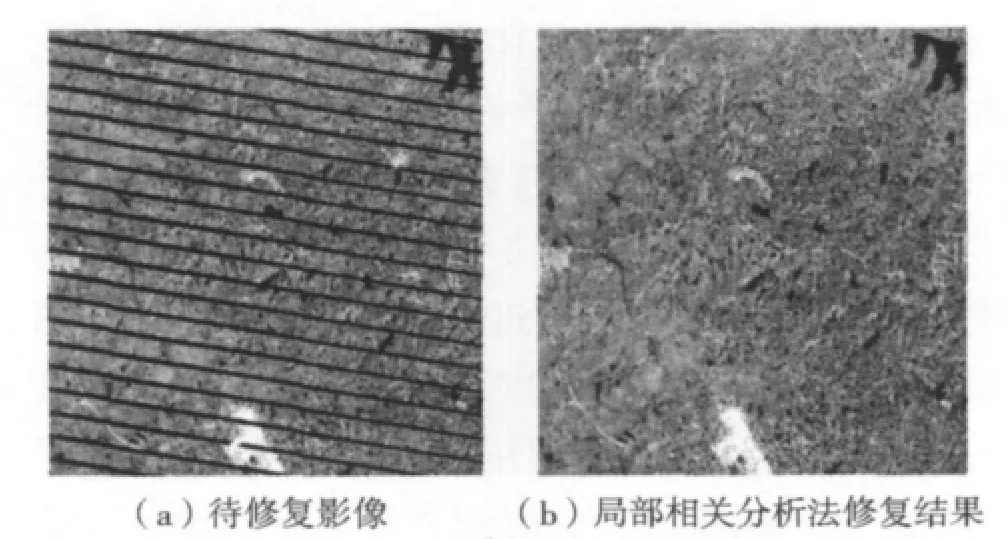
图3 局部相关分析法对真实坏行影像的修复结果(R4G3B2)Fig.3 The restoration result of the proposed approach(R4G3B2)
3 结语
利用外源影像对ETM+SLC-off影像进行修复的关键在于解决待修复影像与待填充影像色调不一致问题。本文首先分析了造成两景影像不一致的原因,针对这两方面原因,分别使用相对辐射校正和局部相关分析法对待填充影像进行处理,得到匹配后的待填充影像。经过模拟坏行影像和真实坏行影像实验,发现该方法的修复效果很好,从视觉和统计两方面均优于传统的局部回归法,修复所得到的影像能够直接用于影像分类。由于该方法对待填充影像的处理是逐像元进行的,且对每个填充像元亮度值的计算均依赖于邻近相似像元在两景影像上的差值,因此对于无法找到条带完全互补的ETM+SLC-off影像,可以使用多景时间间隔较小的影像对一景影像进行填充。
[1]寿敬文,陈雪,马建文,等.采用ALR算法对Landsat-7图像缺行修复的应用研究[J].光电子·激光,2006,17(3):368-371.
[2]田晓红,林有明.Landsat-7缝隙数据恢复的算法研究[J].计算机仿真,2007,24(12):59-61.
[3]ARVIDSON T,GOWARD S,GASCH J,et al.Landsat-7 long term acquisition plan:Development and validation[J].Photogrammetric Engineering and Remote Sensing,2006,72(10):1137-1146.
[4]WILLIAMS D L,GOWARD S,ARVIDSON T.Landsat:Yesterday,today,and tomorrow[J].Photogrammetric Engineering and Remote Sensing,2006,72(10):1171-1178.
[5]朱长明,沈占锋,骆剑承,等.基于 MODIS数据的 Landsat-7 SLC-off影像修复方法研究[J].测绘学报,2010,39(3):251-256.
[6]张鹏强,余旭初,刘智,等.多时相遥感图像相对辐射校正[J].遥感学报,2006,10(3):339-344.
[7]张友水,冯学智,周成虎.多时相TM影像相对辐射校正研究[J].测绘学报,2006,35(2):122-127.
[8]CHEN J,ZHU X L,VOGELMANN J E,et al.A simple and effective method for filling gaps in Landsat ETM+ SLC-off images[J].Remote Sensing of Environment,2011,115(4):1053-1064.
[9]WALD L.Quality of high resolution synthesised images:Is there a simple criterion[A].Proc.Int.Conf.Fusion of Earth Data[C].France,2000.99-105.
Research on ETM+Image Restoration Method Based on Local Correlation Analysis
HU Wei,LIU Yong-xue,LI Man-chun,CHEN Jie-li,MAO Kun
(DepartmentofGeographicInformationScience,SchoolofGeographicand OceanographicSciences,NanjingUniversity,Nanjing210093,China)
The Landsat-7 image data has been widely applied in environment assessment and inspection,global change detection,agriculture,geography research,mapping,archeology and also become popular RS data in China.An instrument malfunction occurred on Enhanced Thematic Mapper(ETM+)of Landsat-7 in 2003,which was caused by failure of the scan line corrector(SLC).Regular bad lines present on the SLC-off scenes and about 25%data is lost.Because the data itself preserves good radicalization and geometry performances,and bad lines occurred randomly in different images,it′s possible for cross restoration by using images with the same extent and different temporal phases.At the basis of summarization of present restoration methods,a new method to restore the SLC-off data using another ETM+image with near time and same extent is proposed.The first step is to eliminate the affection of"foreign difference"(atmospheric condition,weather,etc)of the two images(image needs to be restored and image for filling).Set the image needs to be restored as target,select pseudo-invariant features(PIFs)in two images,and execute local relative radiometric normalization for the image for filling.Convert the image for filling according to nearby spectral-similar pixels by constructing a weight that considers both spectral and spatial distance.Experiment results indicates that the method is an effective method for recovering ETM+images and is superior to traditional local regression match method.
local correlation analysis;image restoration;ETM+
TP751
A
1672-0504(2011)05-0029-04
2011-05- 09;
2011-07-28
国家自然科学基金项目(40701117、41171325)
胡炜(1988-),男,硕士研究生,主要研究方向为遥感信息分析与应用模型。E-mail:have211@163.com