基于局部相似的地籍宗地图斑匹配方法
2011-12-28田原,蔡华,邬伦,许珺
田 原,蔡 华,邬 伦,许 珺
基于局部相似的地籍宗地图斑匹配方法
田 原1,蔡 华1,邬 伦1,许 珺2*
(1.北京大学遥感与地理信息系统研究所,北京 100871;2.中国科学院地理科学与资源研究所,北京 100101)
地籍管理工作中,不同来源的宗地数据通常存在着诸多差异,识别和匹配不同数据源中的同名宗地图斑是提高数据更新精度与速度的关键,对地籍数据库的集成与信息共享有着非常重要的意义。该文针对地籍数据中宗地图斑的形状及变化特点,提出了一种基于局部相似的简单而有效的匹配方法来提高匹配率,基本原理是通过搜索两个面实体间最优的点对应或特征对应关系判断两个面实体是否匹配,采用形状相似度作为局部相似的判断指标。
地籍管理;宗地图斑;图斑匹配;局部相似;GIS
0 引言
随着社会发展,土地类型的划分更细致,建筑物种类越来越多,并且用途不断发生变化,房地产继承、转让、抵押等经济活动愈加频繁,这些都对地籍管理工作提出了更高的要求。地籍管理信息系统作为地籍管理的重要技术手段,必须及时对以上变化做出反应,对地籍信息进行更新[1]。现阶段,地图数据库的集成和合并已成为空间数据库更新的主要手段[1-3]。实践表明,地图数据库的集成和信息共享无法简单地通过数据格式转换或坐标全局变换等方式来实现,必须要应用地图数据库实体匹配与合并等技术才能解决[4]。其中地图实体匹配是地图数据库合并过程的第一步,如果没有良好的匹配效果作为基础,就会影响整个地图合并与更新的结果[2]。
在多数地图中,面状要素往往占有较大比重,它常常是地图表达的主要内容,也是地图使用者比较关注的内容[2]。地籍管理中的地图匹配过程通常是对面实体进行匹配,按照判别依据,既有的面实体匹配技术主要分为3类:1)语义匹配,即通过比较候选匹配目标的语义信息作为匹配依据,主要依赖于属性数据,在特定的情况下该方法是有效的,一般用于其它方法的前期数据筛选和处理[5]。2)拓扑匹配,属于弱条件匹配[6],将候选同名实体的拓扑关系度量作为匹配的依据[5],如张桥平等提出的基于模糊拓扑关系分类的面状目标匹配方法[3];Masuyama提出的基于图斑代表点包含性和重叠面积比值的匹配方法[7];章莉萍等根据制图综合理论提出的增量式凸壳匹配方法[8]等。3)几何匹配,属于强条件匹配[6],通过计算参照目标与源目标之间几何相似度进行目标匹配[5],如王斌等提出的基于目标轮廓线的形状描述匹配方法[9];郝燕玲等提出的基于空间相似性的面状实体匹配算法[10]等。此外,还有一些混合匹配方法,即综合运用几何特征、拓扑关系和语义信息的匹配方法,如童小华等提出的基于概率理论的匹配模型[2]等。
以上匹配方法都将面实体当做一个整体,通过语义信息、拓扑关系或几何形状相似性进行匹配,导致其在地籍宗地图斑匹配中的适用性不强。地籍管理工作中,宗地分割、合并及边界调整等变更常常使得不同数据源中的同名图斑不再是两个大小与形状相似的面实体,待匹配的图斑可能与其同名图斑仅部分重叠或者是同名图斑的一部分;同时,地籍图中所有宗地是不相交、无缝隙的[1],相邻宗地常共边,这就进一步使得大部分待匹配图斑不仅与同名图斑重叠,也常常与同名图斑的相邻图斑重叠。在这种情况下,仅应用图斑实体之间全局相似性指标很难准确、快速地判断其匹配关系。要提高宗地图斑匹配的精度与效率,必须充分考虑地籍图的总体特点和宗地图斑变更的具体特性,设计出更为适用的匹配方法。
1 基于局部相似性的宗地图斑匹配算法
1.1 算法思想
相似是指事物之间能在某些方面一一对应,如部位之间的一一对应,特征之间的一一对应或结构、功能之间的一一对应等[11,12]。空间相似关系可以定义为:设有地理空间目标A1、A2,其特征集合分别为C1、C2,且C1、C2均非空,若C1∩C2=Cn≠Φ,称相似特征集Cn为空间目标A1、A2的空间相似关系[13]。两个空间目标之间的相似关系强弱可用相似度衡量[13]:

其中:sim(A1,A2)是A1与A2的相似度 函数,dis(A1,A2)是对A1与A2间差异的度量,dis(A1,A2)=1和dis(A1,A2)=0是差异性度量的极值,即相异和相同,U是标准化因子,其值一般取数据集中的两要素相应特征间的最大距离[10]。常见的图斑匹配方法通过比较参照目标与源目标之间几何特征要素的相似度来判断图斑匹配关系,常用的几何相似性度量指标包括距离、形状、角度和方向等[9,10]。
如前所述,在宗地图斑匹配中,仅仅考虑待匹配图斑间的整体相似性是不全面的。为此,笔者设计了基于局部相似性的宗地图斑匹配算法,其基本思路为:根据待匹配图斑与候选图斑的位置关系确定其局部相似部位,并基于图斑的局部边界重构图斑;之后计算新图斑之间的形状相似度,从而确定匹配图斑。此算法的基本原理是通过搜索两个面实体间最优的点对应或特征对应关系来判断两个面实体是否匹配。考虑到宗地图斑变更一般不会破坏其既有边界,形状特征往往最能反映其相似关系,算法中采用形状相似度作为局部相似的判断指标。
1.2 局部相似部分的确定
宗地图斑局部相似部分的确定是算法的首要步骤。以图1为例,图斑a1和a2是待匹配图斑b(阴影部分)的候选匹配图斑。在此要确定b和哪个图斑匹配,实际只要确定它的哪部分边界和目标图斑的哪部分边界相似即可,这样问题就由多边形匹配转换成了线匹配。线目标的匹配方法主要有Freeman编码、函数描述法[3]、线形状因子相似算法[14]及基于方向变化角的线实体形状相似度计算方法等[15]。由于上述线匹配方法均比较复杂,本文提出一种根据局部边界重构匹配图斑的方法,得到新的待匹配图斑和候选图斑,之后仍然使用面实体匹配方法寻找匹配关系。

图1 图斑局部匹配示例Fig.1 An example of partial parcel matching
仍以图1为例,在b与a1局部形状匹配过程中,其落在a1内部的边界特征无实际意义。为突出b与a1的局部特征,简化内部轮廓的形状,可以采用b的最小外切矩形c(Rotated Minimum Bounding Rectangle,RMBR)的部分边界代替b的部分边界,生成新图斑b′。如图2所示,Bi(i=1,…,12)为图斑b的边界结点即界址点,Cj(j=1,…,4)为b的最小外切矩形c的顶点,由于局部匹配主要判断b和a1左侧边界的相似性,所以仅保留b的左侧边界,右侧则简化为最小外切矩形的边界。多边形b′是由结点C1、B2、B3、B4、B5、B6、B7、C4、C1组成的多边形,即图2中右斜纹区域。此时,只需以c在图斑a1中切割出候选图斑集合,并判断b′与候选图斑集合中图斑的相似性,从中选出相似性最大的候选图斑即可。

图2 图斑b与b′Fig.2 Parcel b and b′
上述候选图斑集合用{a1i|i=1,…,n}表示,其获取方法如下:为保证与图斑b′进行匹配的候选图斑a1i的最小外切矩形与c大小相近,以b的最小外切矩形c沿着图斑a1和a2的共同边A1A2移动并与图斑a1依次相切(图3),从而得到候选图斑集。以图3为例,候选图斑a1i是当矩形c的左侧边与A1A2相切时,c与a1的重叠区域。将c沿着A1A2移动,就可以得到a1i+1,a1i+2,…,最终得到全部候选图斑集合。a1i与a1i+1在A1A2方向上的步长为:

其中:L为A1A2的长度,N为A1A2上界址点的个数。

图3 候选图斑a1i示意Fig.3 Candidate parcel a1i
图斑b′与候选图斑a1i的相似度表示为sim(b′,a1i),此时匹配候选集中与b′最优匹配的图斑a1k满足:

同理,在b与a2局部相似匹配过程中,待匹配图斑b″是由图2中的结点C2、C3、B8、B9、B10、B11、B12、B1、C2组成的多边形,图斑b″的匹配候选图斑a2i是c的右侧边与A1A2依次相切时c与a2的重叠区域。此时匹配候选集中与b″最优匹配的图斑a2k满足:

计算中若图斑b的某个候选图斑ai的面积小于b的面积,则在b与ai匹配过程中以ai的最小外切矩形作为基准外切矩形,仍应用上述算法。
1.3 局部相似度计算
地籍图斑的局部相似度主要通过局部形状相似性进行度量。判断形状相似的基本方法是形状描述,即通过生成量化的描述子来描述形状,描述子应在尽可能区别不同目标的基础上对目标的平移、旋转和尺度变化不敏感,常用的基于几何特征的形状描述子包括面积、周长、长轴、短轴、主轴方向、凹凸面积、紧密度、实心度和偏心率等[16]。在此基础上,形状相似性匹配通过由多个描述子组合形成的度量准则来衡量形状间的相似性[16]。根据上述实例中对图斑b′和a1i的分析可知,b′与a1i的长轴、短轴、主轴方向和偏心率相同或相近,凹凸面积相差无几,适宜描述其形状相似性的因子主要为面积、周长和紧密度。考虑到紧密度是由面积和周长综合计算得出,反映的信息更加全面,本文选取了紧密度作为形状匹配指标,其计算公式为[16]:
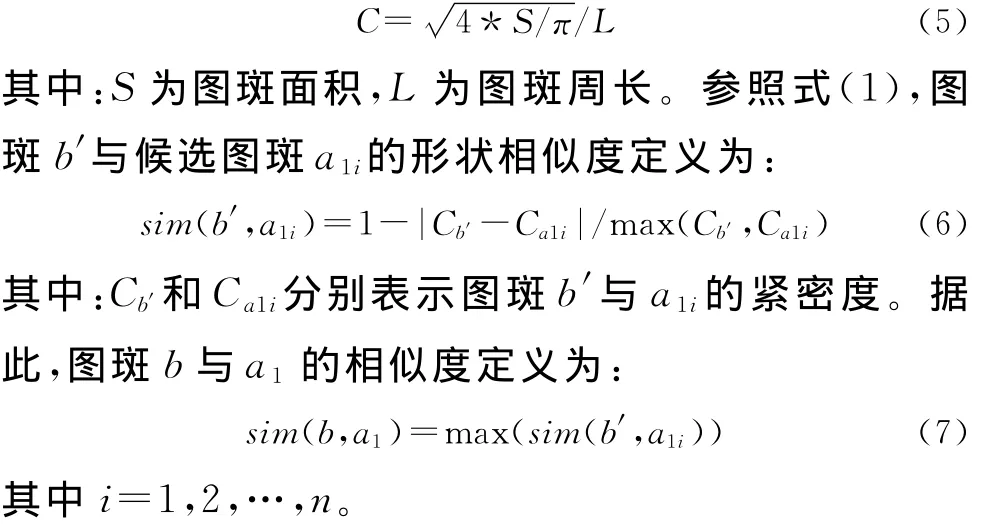
以图1为例,根据上述定义可以求得sim(b,a1)=0.97,sim(b,a2)=0.93。由此可以判定b应该与a1匹配,最佳匹配如图4所示。
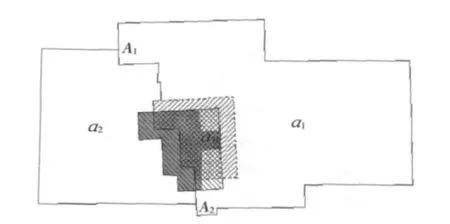
图4 图斑b与a1、a2的匹配结果Fig.4 The match result of parcel b with parcel a1 and a2
1.4 基于局部相似性的匹配算法步骤
基于局部相似的地籍宗地图斑匹配算法步骤如下:1)利用最小外包矩形是否相交筛选出每个图斑初步的候选匹配图斑集,再用待匹配图斑与其候选匹配图斑重叠面积大小进一步筛选出每个图斑的候选匹配图斑集。2)采用既有的技术方法处理能直接确定匹配关系的图斑,例如使用语义匹配或整体几何匹配方法进行匹配;将无法使用既有方法直接确定匹配关系的图斑作为局部相似匹配候选图斑集。3)针对上一步生成的局部相似匹配候选图斑集中的每个图斑:确定该图斑与其候选匹配图斑的局部相似部分,并依照1.2节所述方法生成新的局部候选图斑集;参照式(6)和式(7)计算该图斑与其候选匹配图斑的相似度;根据相似度大小确定该图斑的匹配图斑。
2 实例研究
为了验证上述基于局部相似性的宗地图斑匹配算法的可行性和效率,本文选取了北京市海淀区某区域1998年和2004年两幅地籍图进行实例研究。1998-2004年北京市城市建设发展迅速,该区域的宗地信息发生了较大变化,同时两次测量采用的方法和精度也不同,进一步加大了宗地图斑信息的不一致性。实验所用数据的格式为ArcGIS shape,相关实验在ArcGIS平台上开展,相关结果见表1。
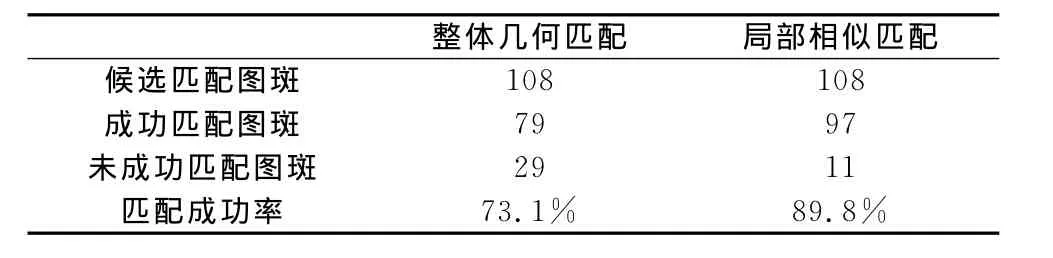
表1 北京某地区不同年代地籍图匹配结果Table 1 The match result of two areal cadastral maps in Beijing in different years
从表1可知,使用整体几何匹配方法时图斑匹配成功率为73.1%,使用局部相似匹配方法后图斑匹配成功率提高到89.8%,说明局部相似匹配方法明显提高了地籍图中同名宗地图斑的识别和匹配能力。
3 结语
地籍图的高效更新是国土研究中的重要问题之一。使用不同数据源更新地籍图的过程中,同名图斑匹配能力直接影响到更新工作的精度和效率。本文针对地籍图图斑及地籍图更新工作的具体特点,提出了一种基于局部相似的地籍宗地图斑匹配方法,实例证明该方法能明显提高地籍图同名图斑的匹配成功率。对于应用此方法仍不能准确匹配的同名图斑,还需进行深入研究。
[1]徐志红,边馥苓.地籍空间实体及其时空拓扑关系[J].武汉大学学报(信息科学版),2002,27(5):522-527.
[2]董小华,邓愫愫,史文中.基于概率的地图实体匹配方法[J].测绘学报,2007,36(2):210-217.
[3]张桥平,李德仁,龚健雅.城市地图数据库面实体匹配技术[J].遥感学报,2004,8(2):107-112
[4]WALTER V,FRITSH D.Matching spatial data sets:A statical approach[J].International Journal of Geographical Information Systems,1999,13(5):445-473.
[5]徐枫,邓敏,赵彬彬,等.空间目标匹配方法的应用分析[J].地球信息科学学报,2009,11(5):658-663.
[6]LYNCH M,SAALFELD A.Conflation:Automated map compilation——a video game approach[A].Proceedings of 7th International Symposium on Computer Assisted Cartography[C].Washington,USA,1985.
[7]MASUYAMA A.Methods for detecting apparent differences between spatial tessellations at different time points[J].International Journal of Geographical Information Science,2006,20(6):633-648.
[8]章莉萍,郭庆胜,孙艳.相邻比例尺地形图之间居民地要素匹配方法研究[J].武汉大学学报(信息科学版),2008,33(6):604-607.
[9]王斌,舒华忠,施朝健,等.一种基于轮廓的形状描述与匹配方法[J].电子与信息学报,2008,30(4):949-952.
[10]郝燕玲,唐文静,赵玉新,等.基于空间相似性的面实体匹配算法研究[J].测绘学报,2008,37(4):501-506.
[11]周立美.相似学[M].北京:中国科学技术出版社,1993.
[12]梁俊雄.相似关系的基本概念及其弱等价性质[J].系统工程理论与实践,1999,28(7):106-111.
[13]闫浩文,褚衍东.多尺度地图空间相似关系基本问题研究[J].地理与地理信息科学,2009,25(4):42-44.
[14]张永华,程耀东,闫浩文,等.多尺度空间线状实体形状相似关系的表达与度量[J].测绘科学,2008,33(6):83-85.
[15]张桥平.地图数据库实体匹配与合并技术研究[D].武汉大学,2002.
[16]丁险峰,吴洪,张宏江,等.形状匹配综述[J].自动化学报,2001,27(5):678-694.
A Cadastral Parcel Matching Method Based on Partial Similarity
TIAN Yuan1,CAI Hua1,WU Lun1,XU Jun2
(1.InstituteofRSandGIS,PekingUniversity,Beijing100871;2.InstituteofGeographicScienceandNaturalResourcesResearch,CAS,Beijing100101,China)
The update of cadastral maps plays an important role in cadastre management,in which many differences exist among data sources produced at different times.Automatically matching areal cadastral parcels from different data sources is the key to improve the efficiency and accuracy of cadastral map update and thus essential for cadastral database integration and information sharing.Considering that areal parcels in different cadastral maps usually have similar shapes,a new cadastral parcel matching method based on partial geometry similarity is proposed in this paper.The principle of partial geometry similarity match is to search the best matched points or features between two parcels to judge if the two parcels match.The definition of partial geometry similarity is given and the algorithm of the new method is designed both in this paper.Moreover,a case study based on two areal cadastral maps in Beijing in different years are carried out to verify the feasibility and efficiency of the new method.It can be concluded that the new method apparently improves the success rate of areal cadastral parcel matching in the case study.This paper may also provide useful guidance on similar studies.
cadastre management;cadastral parcel;parcel matching;partial geometry similarity;GIS
P208
A
1672-0504(2011)05-0025-04
2011-05- 12;
2011-07-15
海外及港澳学者合作研究基金(40928001);“水体污染控制与治理”国家重大科技专项(2009ZX07528-004)
田原(1972-),男,博士,副教授,研究方向为地理信息系统。*通讯作者E-mail:xujun@lreis.ac.cn