电镀线三自由度机械手的设计
2011-12-27陈刚
陈 刚
(株洲职业技术学院,湖南株洲 412000)
电镀线三自由度机械手的设计
陈 刚
(株洲职业技术学院,湖南株洲 412000)
根据环形电镀线的特点,详细介绍了三自由度机械手的基本形式,并分析了其运动过程;就三自由度机械手在环形电镀生产线中的应用做了说明,为环形电镀生产线的设计提供了新的方法。
电镀;机械手;环形电镀生产线
0 前言
在自动化装配电镀生产线上,机械手能将单个或多个工件快速的从一个位置准确地抓取移动到目标位置。机械手的应用大大提高了生产效率,也更容易实现自动化控制,同时其还能使操作人员免受电镀环境对于人身健康的影响。目前应用较多的机械手有二自由度机械手和三自由度机械手。
1 三自由度机械手的基本形式与运动分析
三自由度机械手相对于二自由度机械手结构更复杂,它是在二自由度机械手的基础上实现的,只是比二自由度机械手增加了一个方向的运动。在电镀生产线上,三自由度机械手的两种基本形式是:(1)摇臂式自动取料机械手;(2)横行式自动取料机械手。这两种机械手大量应用于工业生产线上的自动取料,具有很强的代表性。
1.1 摇臂式自动取料机械手
典型的摇臂式自动取料机械手,其运动由X,Y两个相互垂直方向的直线运动与一个摆动运动组合而成,如图1所示。摇臂式自动取料机械手一般为小型机械手,图2为此种机械手的应用实例。
这种机械手的运动过程如下:
(1)动作1 当执行下降取料命令后,机械手抓取装置沿Z轴方向垂直下降,如图1中轨迹1所示,抓取动作可以通过吸盘、气动手指和杠杆机构等完成;

图1 三自由度机械手运动形式一
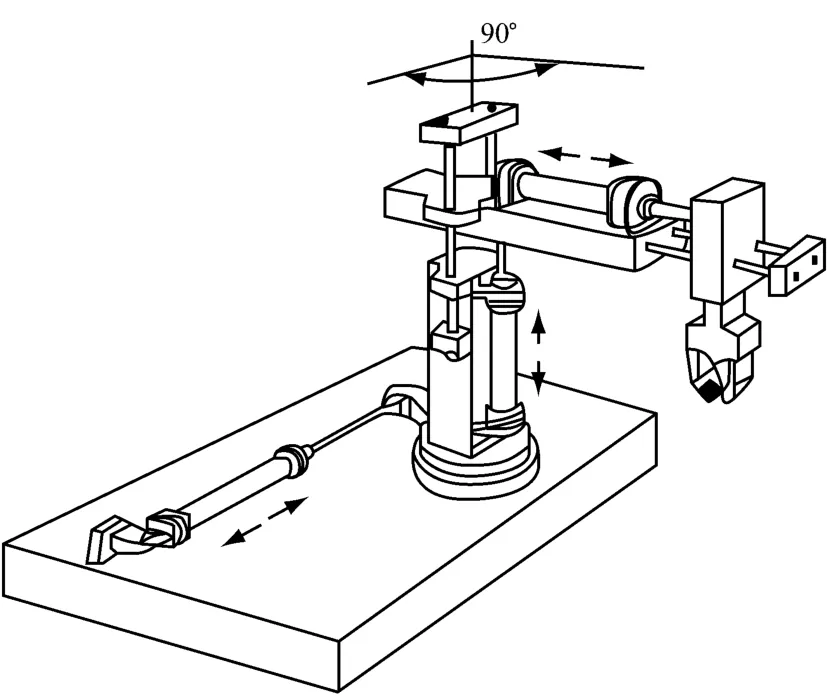
图2 摇臂式自动取料机械手实例
(2)动作2 抓取镀件的机械手沿Z轴反方向运行到原点,如图中轨迹2所示;
(3)动作3 机械手绕Z轴旋转一定角度为下一次运动做准备,如图中轨迹3所示;
(4)动作4 机械手沿X轴方向将镀件运行到释放点上方,再通过Z轴的下降运动将镀件释放到指定地点;
(5)动作5 机械手沿上述轨迹反方向运动到原点,开始下一个循环。
根据控制要求,旋转运动和X轴方向的直线运动可以同时进行。
1.2 横行式自动取料机械手
典型的横行式自动取料机械手,其运动由 X,Y,Z 3个相互垂直方向的直线运动组合而成,也称为三自由度平移机械手。
(1)运动形式
横行式自动取料机械手的手臂结构与摇臂式机械手的手臂结构是类似的,所不同的是横行式自动取料机械手的运动全部为直线运动,在结构上更具有代表性,如图3所示。横行式自动取料机械手的结构分为X轴、Y轴、Z轴3部分,主要在空间运动距离较大的场合使用;而摇臂式机械手则将其中一个直线运动用更简单的摆动运动所代替。

图3 三自由度机械手运动形式二
(2)运动过程分析
这种机械手在结构上主要是将X轴、Y轴、Z轴(主手、副手)、底座等4部分采用模块化的方式通过直线导轨机构搭接而成,其中 X轴、Y轴、Z轴在相互垂直的方向上进行搭接连接。直线导轨机构不仅是运动导向部件,各部分结构的连接也是通过直线导轨机构来实现的。
这种机械手的运动过程如下:
动作1 当执行下降取料命令后,机械手抓取装置沿Z轴方向垂直下降,如图3中轨迹1所示,抓取装置包括吸盘、气动手指和杠杆机构等;
动作2 机械手抓取镀件后沿Z轴反向回到原点,如图中轨迹2所示;
动作3 机械手抓取镀件沿 Y轴方向移动,如图中轨迹3所示;
动作4 根据运动需要,机械手抓取镀件沿X轴方向移动,实现跨距转移,如图中轨迹4所示;
动作5 当镀件运行到释放点上方时,机械手执行下降命令沿轨迹5下降至释放点释放镀件,完成一次镀件的转移;
动作6、动作7、动作8 这几个动作沿上述运动轨迹反向运行,回到原点位置,进人待料状态,等待下一次取料循环。
这种横向移动,根据控制和运行的要求,X轴、Y轴、Z轴的运动可以同时进行。
2 在环形电镀线中的布置形式
环形电镀生产线是电镀行业大批量生产中常采用的设备,其环形的形成除了传统的悬挂链外,还可以通过机械手来实现,其平面布置图,如图4所示。

图4 环形电镀线示意图
在过渡区,机械手若为三自由度,其可用的坐标形式有两种。
(1)直角坐标式机械手 手臂末端沿直角坐标系的X,Y,Z 3个坐标轴作直线移动,如图5(a)所示。
(2)圆柱坐标式机械手 具有一个转动关节和两个移动关节,构成圆柱形状的工作范围,如图5(b)所示。
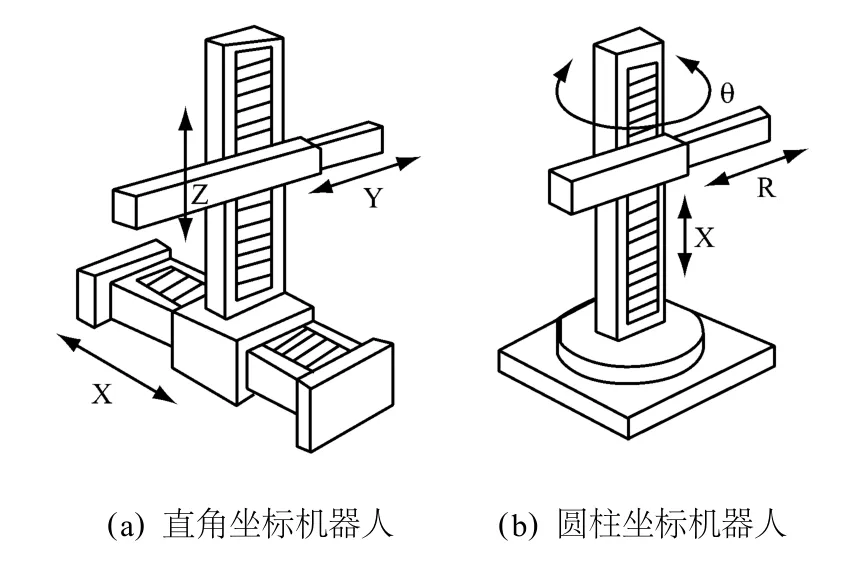
图5 三自由度的两种典型坐标形式
3 小结
随着电镀工业的发展,对电镀工艺提出了新的要求,同样对电镀设备也提出了更高的要求。机械手因其具有良好的空间转移性能和控制性能佳等特点,因而在电镀生产线上有很好的应用前景。
[1] 张立茗.我国电镀设备的发展和现状[J].电镀与精饰,2001,23(5):13-15.
[2] 陈刚.机电一体化技术[M].北京:清华大学出版社,2010.
[3] 陈刚.环形电镀生产线机械手过渡的实现[J].电镀与环保,2010,30(5):14-15.
Design of Three-Degree-of-Freedom Transition Robot for Electroplating Line
CHEN G ang
(Zhuzhou Professional Technical Institute,Zhuzhou 412000,China)
The basic form of the robot is described according to the features of electroplating line,and its moving process is also analyzed.The application of the robot in circular electroplating line is illustrated,providing a new design method for this application.
electroplating;robot;circular electroplating line
TQ 150.5
A
1000-4742(2011)04-0034-03
2010-10-19
