太阳跟踪式光伏发电系统的研究*
2011-12-22郭志冬潘晓贝
郭志冬,潘晓贝
(1.三门峡职业技术学院机电工程系,河南三门峡 472000;
2.三门峡职业技术学院电气工程系,河南三门峡 472000)
太阳跟踪式光伏发电系统的研究*
郭志冬1,潘晓贝2
(1.三门峡职业技术学院机电工程系,河南三门峡 472000;
2.三门峡职业技术学院电气工程系,河南三门峡 472000)
为了提高对太阳能的利用率,最大限度地获得输出功率,目前普遍采用太阳跟踪式的光伏发电方式.介绍了常见的太阳跟踪式光伏发电系统的基本原理、结构及其实现.
太阳;跟踪;光伏发电
能源是制约经济发展的最主要的因素,最近全球爆发的能源危机迫使全世界各国都在积极地开发新能源,在此大的背景形势下,多种新能源如太阳能、风能和生物能等得到快速发展.其中太阳能以其独到的优势更是全世界研究的热点.但是,光伏电池转换效率低,投入成本大限制了光伏发电的快速发展.目前,普遍采用的太阳跟踪式光伏发电系统可以提高发电效率,减少成本,因此,得到了广泛的研究.
1 光伏发电的基本原理
光伏电池是利用半导体材料的电子特性把阳光直接转换成电能的一种固态器件.它的种类很多,大致可分为硅光伏电池、化合物半导体光伏电池两大类.其中硅光伏电池包括单晶硅、多晶硅、非晶硅电池;化合物半导体光伏电池包括砷化镓光伏电池等.在实际应用中,应用最多的主要是单晶硅和多晶硅光伏电池.
当适当波长的太阳光照到光伏电池上时,光伏电池吸收光能后在其两端产生电动势,这种现象称为光伏效应.如果在产生的电动势两端并接上负载,则负载中就有“光生电流”流过,从而获得功率输出.这样,太阳的光能就直接变成了可以付诸实用的电能.光伏电池等效电路如图1所示.
在实际应用中,光伏电池单元输出功率较小,一般不单独作为电源使用.把每个单元进行串、并联并封装后就成为光伏电池组件,功率一般为几瓦、几十瓦甚至数百瓦,众多光伏电池组件需要再进行串、并联后形成光伏电池阵列(简称光伏阵列),输出功率可达几百瓦、几千瓦或者是更大的功率.与传统的火电发电方式相比较,它无旋转部分、无气体排出、无噪音,因此,是无污染清洁的发电系统.
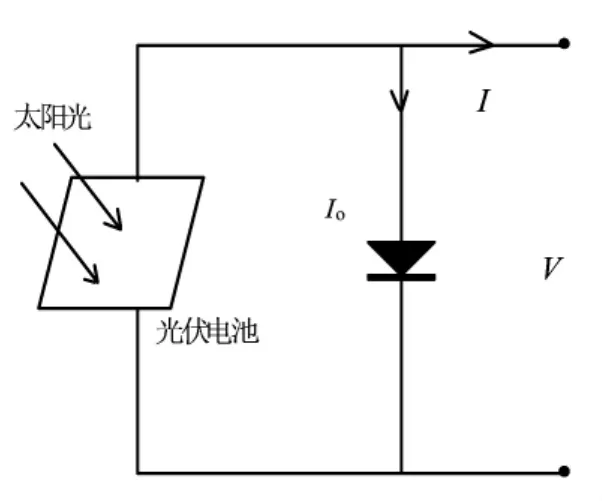
图1 光伏电池等效电路图
2 跟踪式光伏发电系统
2.1 跟踪式光伏发电系统的基本原理
跟踪式光伏发电即光伏阵列能够自动跟踪太阳的位置,使光伏阵列始终保持与太阳光线垂直,从而获得最大的输出功率.在晴天时,通过太阳光跟踪传感器判断太阳光与光伏电池阵列平面是否垂直,如果垂直,则不驱动电机转动;如果不垂直则发出控制信号,驱动电机转动,再通过传动机构带动电池板转动,使太阳光与电池板垂直,这样周而复始的工作,实现实时跟踪,从而获得最大的能量.在阴天或多云,光线不正常时,系统通过当前时间、当地经纬度计算太阳的方位角和高度角,并通过位置传感器判定电池板阵列的当前位置,控制单元发出控制信号驱动电机转动,再通过传动机构带动电池板转动,使电池板跟随太阳的运行轨迹转动,达到跟踪太阳的目的.
2.2 太阳高度角和方位角的计算
根据天文学太阳运行的规律,任意时刻太阳高度角和方位角都可以通过天文公式计算得到.太阳高度角指从太阳中心直射到当地的光线与当地水平面的夹角(或观测点到太阳的连线与地面之间的夹角),其值在0°~90°之间变化,日出日落时为零,太阳在正天顶上为90°.
太阳高度角可由下列公式得到:

式中,α为太阳高度角,δ为当地的地理纬度,φ为太阳赤纬角,ω为太阳时角.
太阳赤纬角φ是太阳光线与地球赤道的夹角,以北为正.一年内,太阳赤纬角在±23°27'之间变动.要确定某一天的太阳赤纬角,可以利用下面的公式来进行近似的计算:

式中:d为从1月1日起,到该天的天数,例如2月22日,d=31+22=53.
太阳时角ω:当地太阳时.地球一天24 h自转360°,每个小时的自转角为15°.当地正午时的时角为0°,上午为负,下午为正.例如,上午10 时,ω = -30°,下午3 时,ω =30°.
太阳方位角A指太阳光线在地平面上的投影与当地子午线的夹角,可近似地看作是竖立在地面上的直线在阳光下的阴影与正南方的夹角.方位角以正南方向为零,由南向东向北为负,由南向西向北为正,如太阳在正东方,方位角为-90°,在正东北方时,方位为-135°,在正西方时方位角为 90°,在正北方时为±180°.A可由下列公式得出:

式中,δ为当地的地理纬度,φ为太阳赤纬角,ω为太阳时角[1,2].
2.3 太阳光跟踪传感器
太阳光跟踪传感器的作用是检测光伏阵列是否对准太阳.当太阳光垂直照射到跟踪传感器上时,跟踪传感器四个方位的输出信号全部为零,表示跟踪传感器已对准太阳.当太阳光偏离垂直照射跟踪传感器时,跟踪传感器能检测出当前太阳偏离跟踪传感器的方位,同时在跟踪传感器相应方位的输出端输出一定的电信号.
太阳光跟踪传感器的光电检测模块主要由一个四象限光敏二极管探测器组成.四象限光敏二极管2CU301是在同一芯片上制作的4个二极管单片(它们之间有十字沟槽间隔).单元的性能参数基本相同,一致性要求较高.4个二极管单元相当于直角坐标系中的4个象限,每个象限的二极管有自己的输出.当照射在4个象限光敏二极管上的光斑图像位于十字形划线的中心时,代表4个象限的光敏二极管各自的输出相等,经过运放对信号放大处理后,输出信号为零,如图2所示.当光斑相对于十字形划分线的任何位移时,都会使4个象限的光敏二极管的输出随之而发生变化,运算放大器的输出也随之产生相对位移方向上的正负变化,从而可以确定物体在二维方向上的位移[3].

图2 光电检测模块
2.4 执行机构
执行机构主要是驱动模块、步进电机、机械传动机构以及相应的支撑结构.驱动模块接受微控制器的输出脉冲后,经光电隔离后进行放大循环输出.步进电机能够直接进行数字控制,将脉冲序列转化为相应的角位移,即接收一个脉冲,步进电机就转过一个角度.机械传动机构的方位轴垂直地平面,另一根轴与方位轴垂直称为俯仰轴.工作时,太阳跟踪装置根据太阳运动的位置绕方位轴转动改变方位角,绕俯仰轴作俯仰运动改变接收平台的倾斜角,从而使太阳光线与接收平台垂直,始终聚集在焦点上.支撑结构将步进电机输出的功率降速增距后,分别转化为水平方向的低速旋转运动和垂直方向的俯仰运动以跟随太阳,使之与光伏阵列保持垂直.[3,4]
2.5 逻辑控制单元
太阳跟踪方式常用的逻辑控制元件主要有单片机、数字信号处理器(DSP)、可编程序逻辑控制器(PLC)及PC机.基于PC机的太阳位置式跟踪方法,其成本相对于其他几种实现方式较为昂贵,但是由于PC机具有强大的数据存储及计算能力,可以用来完成较为复杂的运算,所以在对计算精度要求较高的场合,一般采用它来进行控制.另外在大规模的太阳光伏电站中,也可以使用PC机对太阳光伏阵列实现集中控制,可以收到控制精度高、平均成本低的效果.对于单台或少数的太阳跟踪系统,前几种控制器使用较多,相对而言,单片机系统具有较高的性价比,因此,目前使用最为普遍[5].
3 结束语
光伏系统的发电效率一直是制约光伏产业发展的重要因素之一,增大太阳辐射的利用率是提高光伏系统发电效率三种途径之一.跟踪系统能够控制光伏阵列始终与太阳光保持垂直的角度,从而提高光伏阵列的光电转化效率.虽然跟踪系统的实现多种多样,但是基本的思路和框架结构是基本一致的.
[1]关继文,孔令成,张志华.高精度太阳能跟踪控制器设计与实现[J].自动化与仪器仪表,2010,(3):23-25.
[2]王淼,王保利,焦翠坪,等.太阳能跟踪系统设计[J].电气技术,2009,(8):100 -103.
[3]赵建钊,史耀耀,马健,等.智能型太阳能跟踪系统设计与实现[J].电网技术,2008,32(24):93-97.
[4]向平,程建民,毕玉庆.碟式太阳能跟踪装置的结构设计和动力分析[J].机械设计与制造,2009,(6):17-19.
[5]李建林.一种新型的太阳光伏发电跟踪系统设计[J].电气应用,2009,68(10):68 -71.
The Research of Sun Tracking Photovoltaic Power Generation System
GUO Zhi-dong1,PAN Xiao-bei2
(1.Dept.of Mechanical& Electronic Engineering,Sanmenxia Vocational& Technical College,Sanmenxia Henan 472000,China;
2.Dept.of Electric Engineering,Sanmenxia Vocational& Technical College,Sanmenxia Henan 472000,China)
In order to improve the utilization of solar energy,and to obtain the maximum output power,sun -tracking photovoltaic power generation is used widely now.This paper describes the basic principles of common sun tracking photovoltaic power generation systems,system architecture and its implementation.
sun;tracking;photovoltaic power generation
TK 513.4
A
1673-2103(2011)05-0043-03
2011-07-13
郭志冬(1981-),男,河南焦作人,助教,在读硕士研究生,研究方向:电气控制工程.
