逆变器非线性运行的同步电动机无源性控制研究*
2011-12-12谷善茂马良河
谷善茂,马良河
(潍坊学院,山东 潍坊 261061)
逆变器非线性运行的同步电动机无源性控制研究*
谷善茂,马良河
(潍坊学院,山东 潍坊 261061)
通过严格的理论分析和数学计算,建立了同步电动机在同步坐标系中E-L方程形式的数学模型,给出了磁场矢量控制的基本控制目标。以这些模型为基础,研究并设计了在负载转矩为任意时变未知情形下同步电动机时变转矩(转速、位置)的无源性渐近跟踪控制器。在实现机械控制目标的同时考虑并实现了对磁场方向和磁场幅值的控制,即同时实现了磁场矢量控制。
同步电动机;无源性控制;渐近跟踪;负载转矩
1 引言
无源性是系统的一种跟输入输出相关联的重要性质。粗略的解释就是如果一个系统的能量总是小于或等于初始时刻系统所具有的能量与外部提供的能量之和,则表明系统只从外部吸收能量,而系统本身并不产生能量,则称系统是无源的。无源性是与系统的稳定性紧密相关的一个重要概念,虽然无源性并不等同于系统的稳定性,但是如果系统是无源的,通过输出反馈就可以实现闭环系统的渐近稳定[1-2]。
交流电动机的无源性控制是Romeo Ortega等人[3]从机器人控制的研究中受启发发展起来的。他们通过对电机的E-L(Euler-Lagrange)方程的分析入手,将整个电机系统分解为电气和机械两个子系统,使电气子系统严格无源化,将机械系统看作电气子系统的无源性干扰,根据无源性与稳定性的关系,这样就能保证整个电机系统的全局稳定性。
该方法由于从电机的能量方程入手,使得系统的控制律具有明确的物理意义,使自动控制专家的理论分析更容易,也便于电气工程师们理解和应用。特别是通过对感应电动机的研究发现,系统能够实现控制的简化,能够找到不影响稳定性的无功力的存在。特别是在定子坐标下,系统的反馈不需要观测器,直接利用输出反馈就可以实现系统的全局稳定性[4],同时在一定的假设和条件下无源性控制就变为间接磁场定向控制。
2 同步电动机(d,q)坐标系的E-L方程
同步电机在同步坐标系中的E-L方程如下:
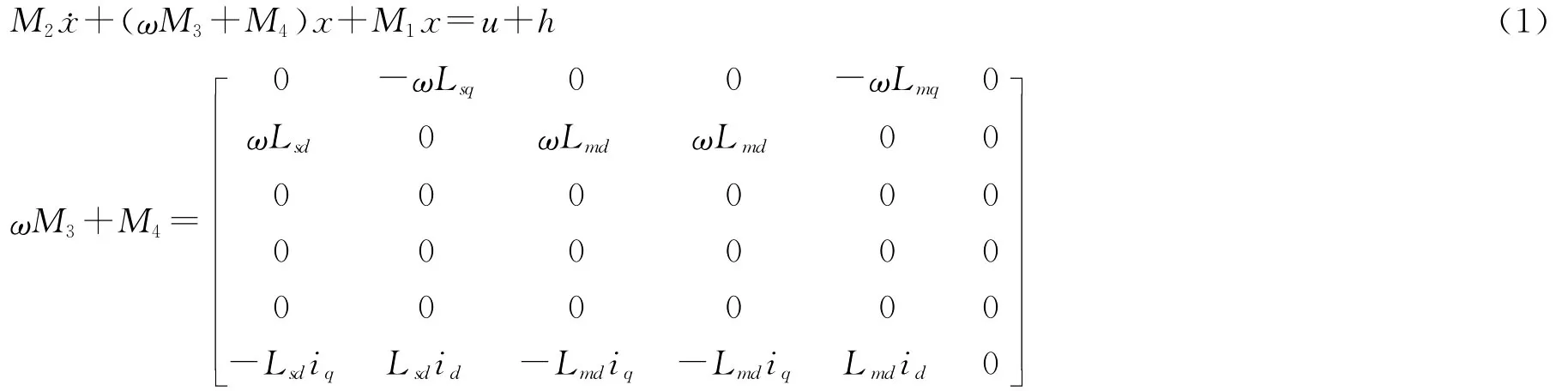
矩阵ωM3+M4不是反对称的,但是可以按下式等价于反对称矩阵F(x)

其中,F(x)是反对称矩阵。
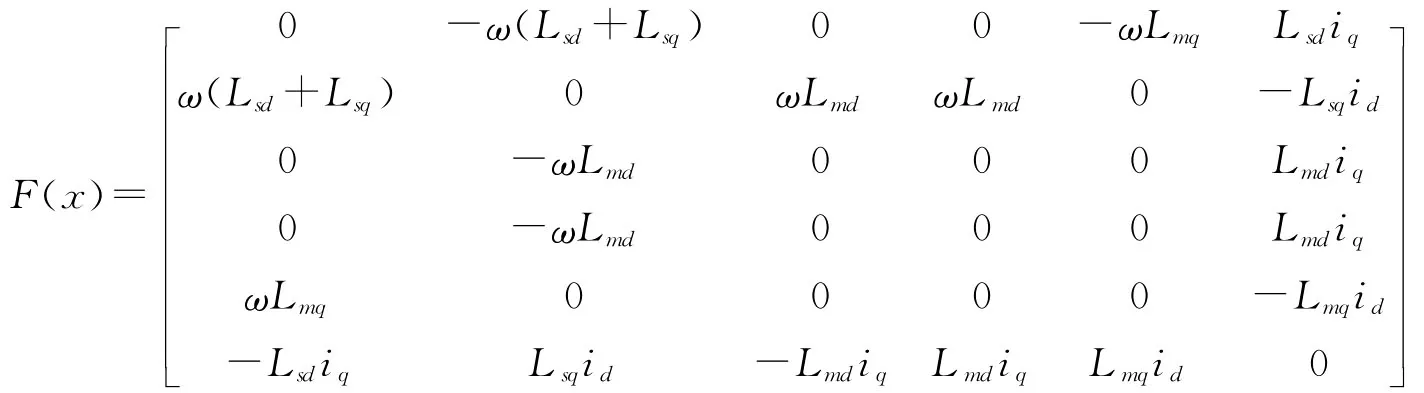
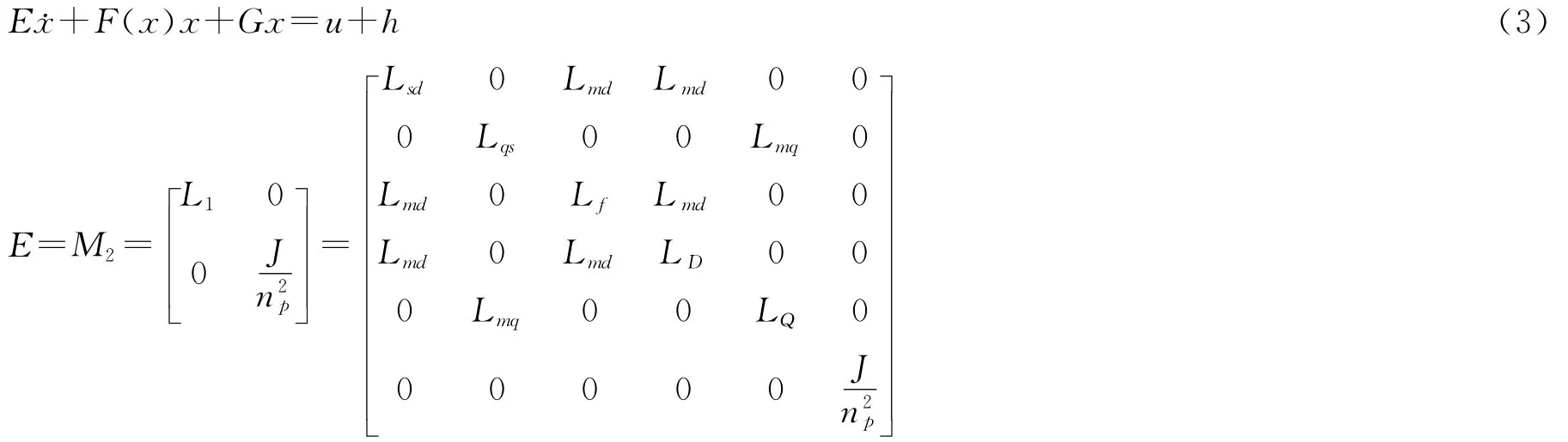
因此,方程(1)等价于方程
3 逆变器的非线性模型
电机的非线性特性已经在电机模型中得到了体现,为了提高整个调速系统的性能,必须考虑逆变器的非线性[5]特性的影响。为了研究逆变器的非线性效应的影响,逆变器的输入输出模型可以用下列连续分段线性函数表示[5]

其中,u(t),ν(t),分别为逆变器的一相输入输出电压;θi是正的常数,依赖于逆变器的实际参数,如中间直流电压、调制频率、死区时间以及功率器件开通关断时间等;由于各种逆变器的实现方法不同,同时为避免参数的确定,一般假设θi在某一数值附近波动。sgn(i(t))为一相电流i(t)的不连续函数,可通过检测定子电流的方向获得。
例如,在仿真时,取逆变器的参考模型为:

δij的变化范围分别为:

4 控制器设计
假设定子电流、转子励磁电流、转子转速都可以准确测量[6-8]。根据下列方程设计期望轨迹


负载转矩估计器为

式中,k7>0为反馈增益系数。
设计无源性控制器的控制变量为
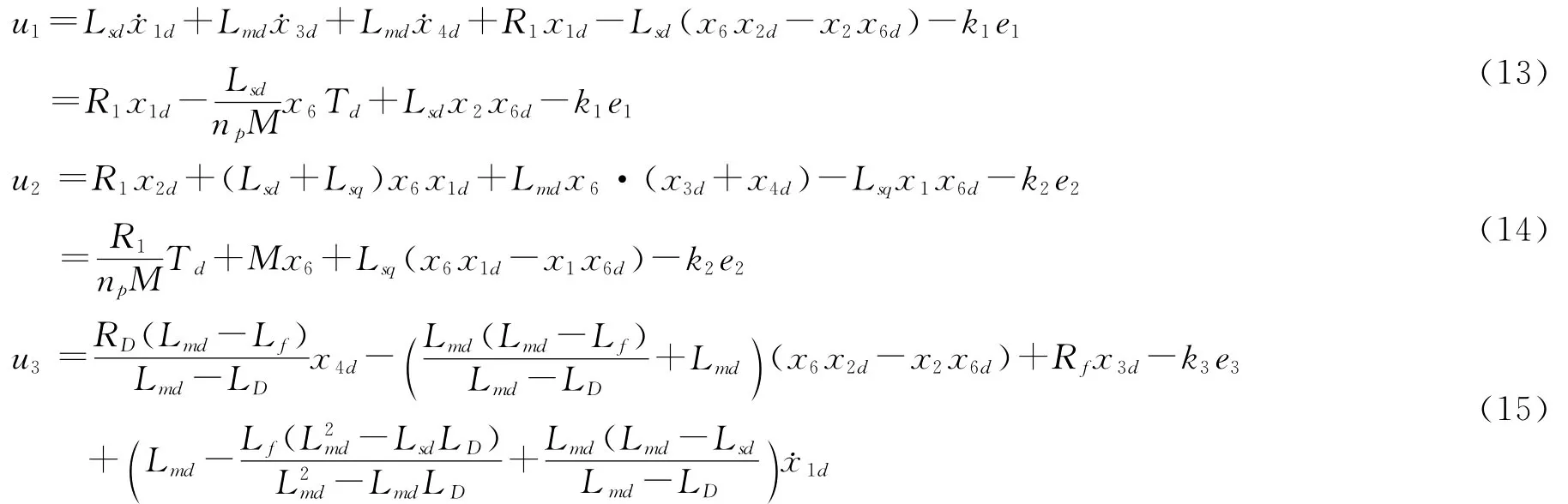
则只要控制系数k1,k2,k3选取合适(适当大),这样设计的控制器一定能实现对转矩的渐近跟踪控制和对转子磁场矢量的渐近控制。
一般而言,因为转子阻尼绕组电流x4,x5不可测量,跟踪误差e4,e5无法得到。所以常取k4,k5=0。
控制器结构见图1,基于这种控制器的电气传动系统的结构见图2。其中,符号SM表示同步电动机,DCS表示直流电源,PBC表示无源性控制器,rotor excite表示励磁电源。
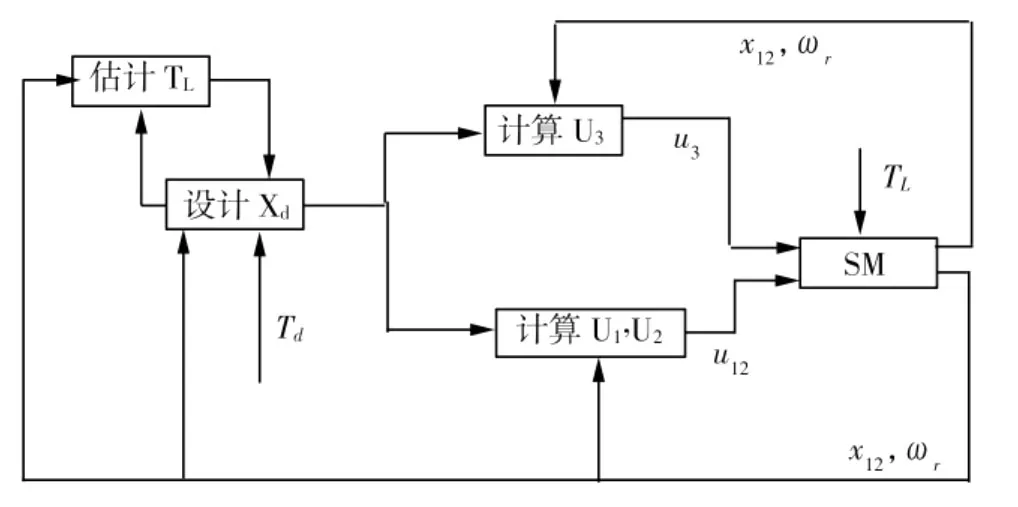
图1 无源性控制器的结构
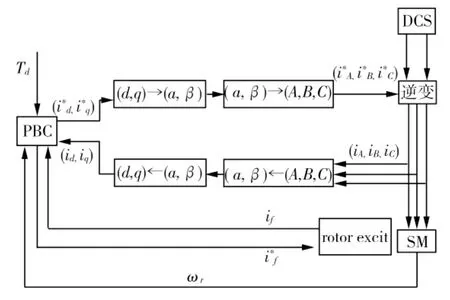
图2 无源性控制器的电气传动系统结构
5 仿真
仿真中,考虑了负载转矩的下列四种情况
(1)恒值型负载:TL=8
(2)周期型负载:TL=5+5sin(10t)
(4)斜坡型负载:TL=3+3·t
期望转矩由给定期望转速x6=500+10sin(5t)生成,取期望转子磁场幅值为M=5。经多次仿真实验,得到近似最优的反馈系数为:

应用Matlab/Simulink仿真,在以上各情形下的仿真结果见图3-图12。在仿真曲线中,符号MM表示转子磁链幅值;TL、TL1分别表示负载转矩及其估计值;Te、Td分别表示电磁转矩和期望转矩;x6、x6d分别表示实际转速和期望转速。
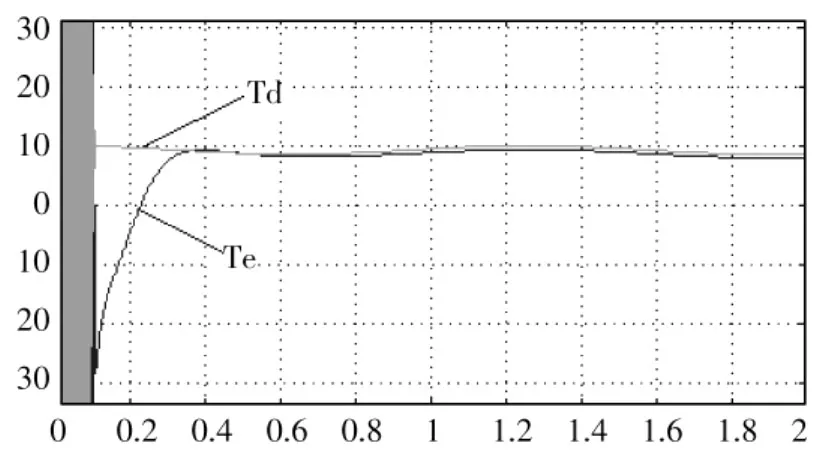
图3 情形1的期望转矩跟踪曲线
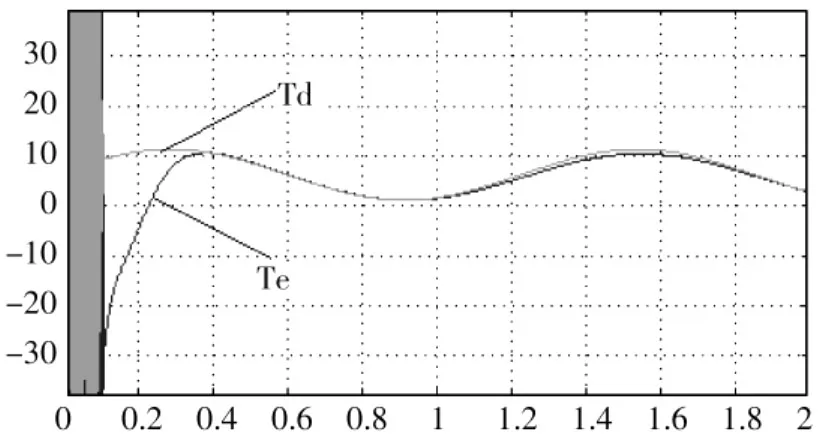
图4 情形2的期望转矩跟踪曲线
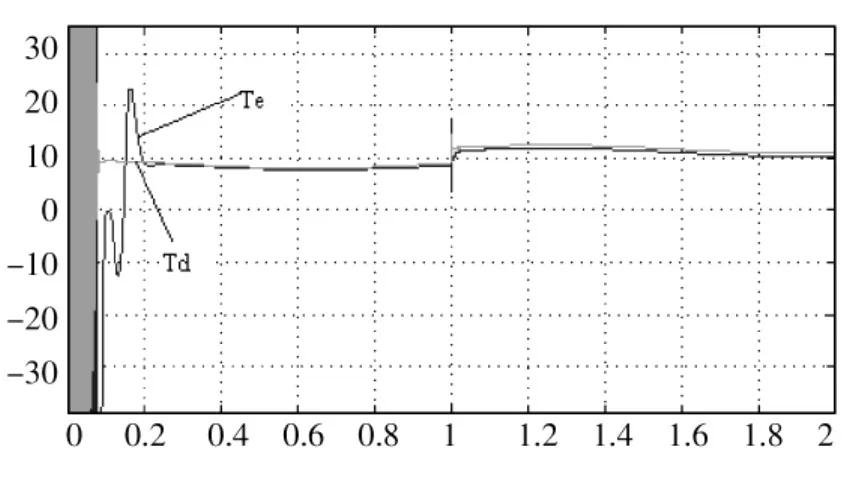
图5 情形3的期望转矩跟踪曲线
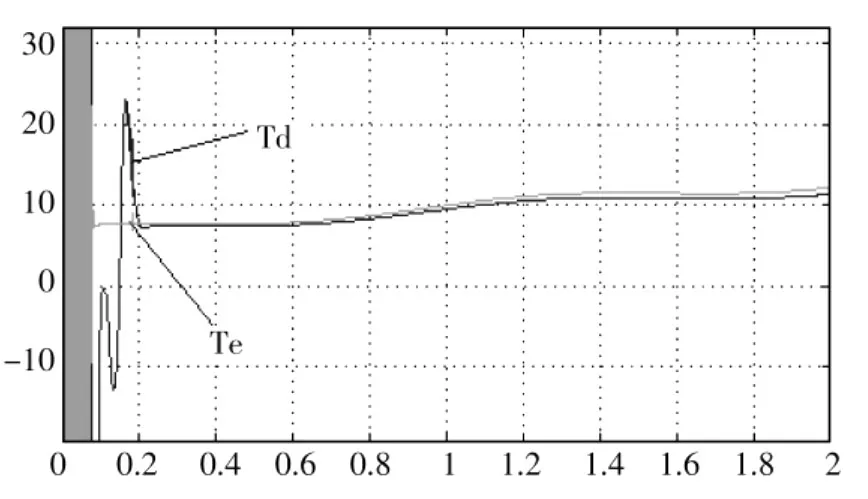
图6 情形4的期望转矩跟踪曲线
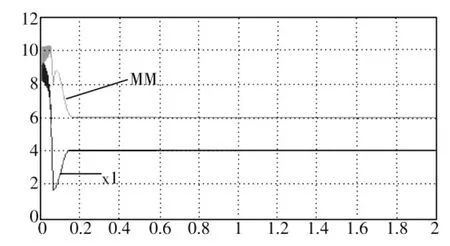
图7 情形1/2/3/4)的转子磁场控制曲线
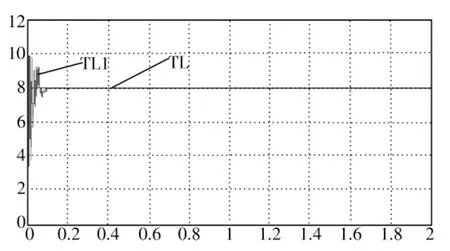
图8 情形1的负载转矩估计曲线
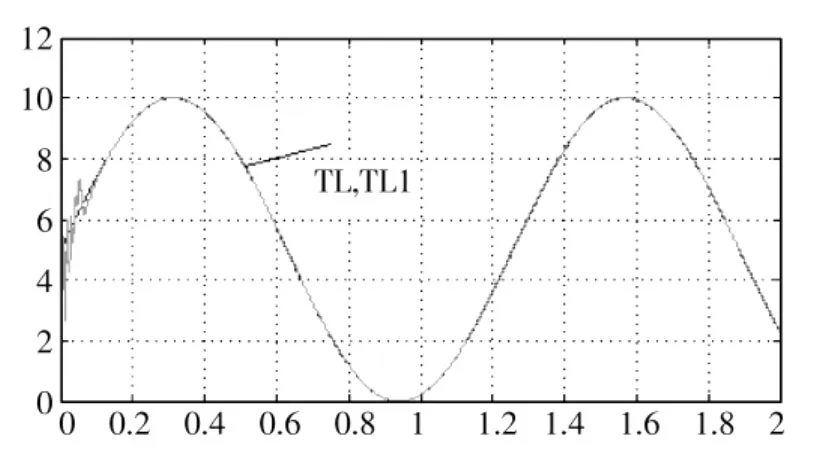
图9 情形2的负载转矩估计曲线
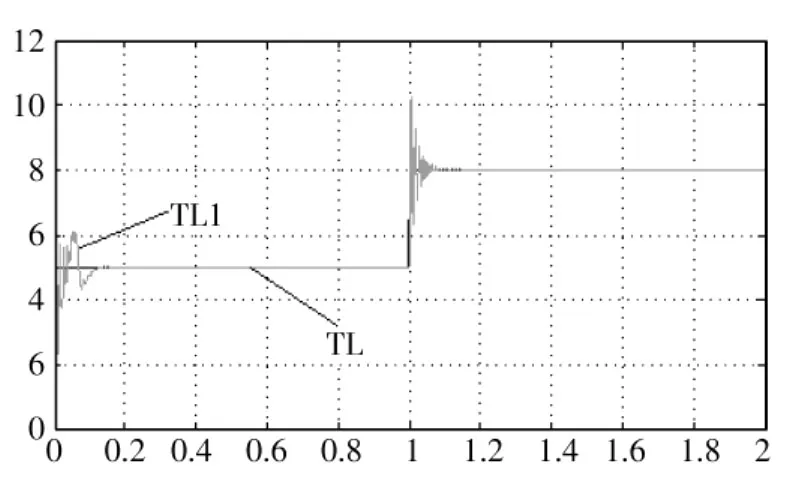
图10 情形3的负载转矩估计曲线
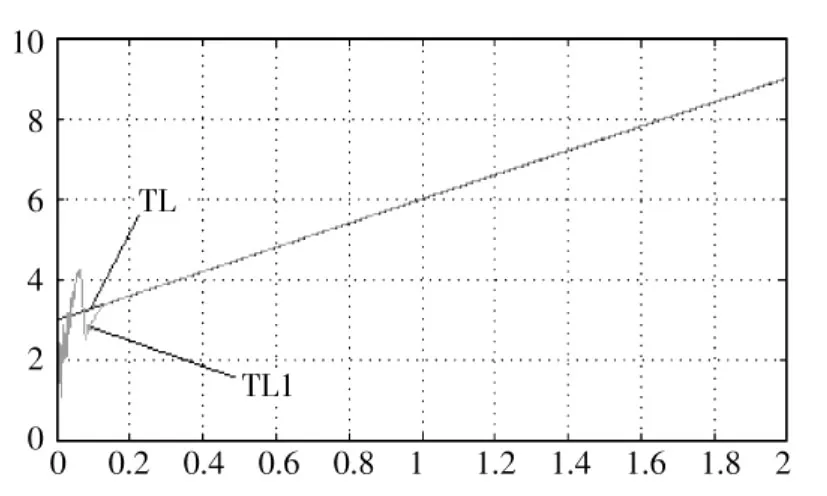
图11 情形4的负载转矩估计曲线
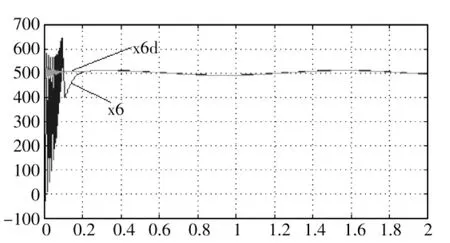
图12 情形1/2/3/4)的转速跟踪曲线
由这些仿真曲线可以看出,对于负载转矩的不同情况,对期望转矩的跟踪性能都非常好,具有很快的跟踪速度和很小的跟踪精度,只要参数选择合适,可以使静误差非常小。从而证明了这种控制器具有很高的控制性能和鲁棒性。由仿真曲线看出,对负载转矩的估计很好,几乎没有静态误差,对转子磁场矢量控制的结果也很好。在对期望转矩的跟踪控制上,静态误差很小,但是在过渡过程中有较大幅度的振荡,这可能主要与初始值的设置有关,也可能受控制器系数非最优性的影响。
6 结论
同步电动机的无源性控制器可以用来实现转速的跟踪控制和转子位置的跟踪控制,而且具有很高的控制性能;对于实际系统中逆变器的非线性效应,这种无源性控制器同样可以保持高性能的控制效果和鲁棒特性,同时,这种无源性控制器关于负载转矩也具有很高的鲁棒性能。另外的仿真实验还证明,基于转子磁场矢量控制方式的控制器都可以很好地实现转速和位置的跟踪控制,具有很高的动态控制性能和鲁棒特性。
[1]Qin H S,Hong Y G.Passivity,stability and optimality[J].控制理论与应用,1994,11(4):421-427.
[2]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.
[3]Ortega R,Jiang Z P,Hill D J.Passivity-based control of nonlinear systems:A tutorial[J].Proceedings of the American control conference,1997,5:2633-2637.
[4]李伟.感应电机的非线性控制研究[D].广州:华南理工大学,2002.
[5]Zhu G,Dessaint L A,Akhrif O,et al.Speed tracking control of a permanent magnet synchronous motor with state and load torque observer[J].IEEE Trans,2000,47(2):346-355.
[5]陈峰,徐文立.基于无源性的同步电动机控制器设计[J].电机与控制学报,1998,2(4):217-220.
[7]Hossam A,Fattah A,Kenneth A.Speed control of electrical machines:unknown load torque case[J].IEEE on A C,2001,46(12):1979-1983.
[8]Cecati C,Rotondale N,Torque and speed regulation of induction motors using the passivity theory approach[J].IEEE transactions on industrial electronics,1999,46(1),119-127.
(责任编辑:肖恩忠)
Passivity Control Research of Synchronous Motor under Nonlinear Inverter Power Supply
GU Shan-mao,MA Liang-he
(Weifang University,Weifang 261061,China)
By strict analysis and calculation,the same two types of synchronous motor models as induction motors are established in various reference coordinates.Based on the established model in the synchronous rotating coordinates,the passivity based controller of synchronous motor is designed in case of time-varying and unknown load torque.In order to carry out the torque(rotor velocity and rotor position)tracking control,the magnetic amplitude and angle asymptotic tracking control are established simultaneously.
synchronous motor,passivity based control,asymptotic tracking control,load torque
2011-07-28
谷善茂(1978-),男,山东潍坊人,潍坊学院信息与控制工程学院讲师,博士。研究方向:电力电子与电力传动,同步机无传感器控制策略。
TM341 文献标识码:A 文章编号:1671-4288(2011)06-0121-05
