粒子群优化BP网络及其应用
2011-12-09任玉艳王洪瑞鲍洁
任玉艳,王洪瑞,鲍洁
(1.燕山大学里仁学院,河北秦皇岛 066004;2.河北大学电子信息工程学院,河北保定 071002;3.国家发展和改革委员会国家投资项目评审中心,北京 100037)
粒子群优化BP网络及其应用
任玉艳1,王洪瑞2,鲍洁3
(1.燕山大学里仁学院,河北秦皇岛 066004;2.河北大学电子信息工程学院,河北保定 071002;3.国家发展和改革委员会国家投资项目评审中心,北京 100037)
提出一种基于量子激励粒子群算法优化BP网络的参数方法.该算法在粒子群优化算法中引入量子论思想,克服了传统粒子群算法易陷入局部极值、优化效果较差的缺点,最终得到BP网络的最佳参数值.利用优化后的BP网络控制仿生机器马的运动状态,仿真结果表明该算法能快速、准确地达到最佳控制效果.
BP网络;粒子群算法(PSO);量子论;优化算法;仿生机器马
近年来随着人们生活水平的不断提高,自身健康受到越来越多的关注.骑马是一项行之有效的锻炼方式,然而在都市中很难有时间和场地去实现.仿生机器马运动器是用六自由度机器人平台模拟马的奔跑姿势,通过对于运动者动态变化的生理指标数据的融合分析准确快速的控制机器马的运动状态,以达到最好的锻炼效果.针对人体生理指标非线性、多变性以及耦合性的特点,采用BP网络实现生理融合,控制仿生机器马运动状态.
BP神经网络由于其简单易于实现,是一种在ANN中应用十分广泛的多层前馈神经网络,但是传统的BP神经网络采用梯度下降法,易陷入局部极小值,并且收敛速度较慢[1-2].针对BP网络的缺陷,国内外学者提出了很多改进方法,其中基于计算智能的算法如遗传算法、蚁群算法和粒子群优化算法等较为多见[3-7].
具有量子行为的粒子群优化算法是继粒子群优化算法后,提出的一种新型、高效的进化算法,但其仍不可避免地遇到早熟收敛的问题[8].本文将量子原理和传统的粒子群优化算法结合,提出了一种量子激励的粒子群优化算法调整BP网络参数,可提高粒子群体的多样性使其有效地跳出局部极值点,得到BP网络的最佳参数值.
1 量子激励的PSO优化BP网络算法
1.1 量子激励的PSO优化算法
粒子群优化算法(PSO)是模拟鸟类捕食行为的一种基于种群的随机优化技术.设在N维搜索空间中,共有m个粒子,第i个粒子的位置为xi=(xi1,xi2,…,xiN),(i=1,2,…,m).第i个粒子自身经历的最佳位置为Pi=(Pil,Pi2,…,PiN),每个粒子的飞行速度V i=(vi1,vi2,…,viN).在整个群体中,所有粒子经历的最佳位置为Pg=(Pg1,Pg2,…,PgN).对每一代粒子,其第n维(1≤n≤N)的速度和位置根据公式(1),(2)迭代,

式中:t为进化代数;ω为惯性权值,用于平衡全局搜索和局部搜索;rand是在[0,1]内变化的随机数;c1,c2是学习因子,为正常数.
本文提出的量子激励的粒子群优化算法是利用量子原理产生PSO的子代.在使用标准PSO公式(1),(2)更新粒子群的位置和速度后,从先前PSO粒子群位置中适应值最好的当中随机选择一个粒子(Pbest),用以完成量子操作.这样通过改变粒子群中的最优粒子(gbest)产生子代.计算子代的适应值,当子代有更好的适应值时,用子代代替gbest,这点确保了最优粒子的适应值等于或者超过了前一代的适应值.从而使PSO摆脱陷于局部极值的缺陷,提高了算法的收敛速度和精度.
由不确定理论可知,量子界中的粒子的位置和速度不能同时确定.QPSO和标准PSO的区别主要在于位置x和速度v的准确值不能确定.因此通过Delta技术可将在量子空间中搜索特定区域的粒子映射到其解空间的实际位置.量子激励的粒子群优化算法使用一种基于概率密度函数的Delta参数帮助粒子收敛.位置更新公式由式(3)替换.

式中,mbest是平均最优位置,定义如下:

式中,S是种群中粒子的个数.
β称为创造因子,是该算法中唯一的参数,负责控制粒子的收敛速度.式中的加或减各占50%的概率.
1.2 量子激励的PSO优化BP网络算法
提出用量子激励的PSO算法优化BP网络参数,其基本步骤如下:
1)初始化粒子群,令pbest=x0.
2)计算粒子群的适应值fitness,以BP网络的误差E(式(5))作为粒子群的适应值的评价函数

式中,di,oi为期望输出与实际输出;N为输出向量维数.
3)如果fitness(i)<fitness(pbest),则pbest=x,gbest=min(pbest),否则按照公式(1),(2)更新v和x(fitness(i)为第i个粒子的适应度).
4)根据公式(4)计算mbest.
6)如果fitness(xt+1)<fitness(gbest),则gbest=xt+1.
7)若满足最在迭代次数,则停止搜索,得到优化的BP网络参数;否则返回步骤2).
2 应用实例及其分析
以仿生机器马为应用对象,较为真实地模拟马的多种运动方式,如走、慢跑、快跑、疾驰等.通过实时采集骑马者的一些生理指标,进行生理信息融合来控制机器马的运动状态,达到最佳锻炼效果.
本文采用的BP神经网络结构为5-8-1,输入分别为心率(HR)、血氧(SaO2)、血压(BP)、年龄(Age)、性别(Sex),输出为仿生机器马的虚拟速度(v),如图1所示.
采用某医院提供的300组生理数据作为样本,分别使用PSO、量子激励PSO(新PSO)方法训练BP神经网络.传统PSO、量子激励 PSO参数选取:粒子群数目为40,c1=c2=2,最大迭代遍数为1 000,ω从0.9线性减到0.4,β从0.5线性增长到1.进行训练时的误差比较曲线如图2所示.从图2可以看出,无论训练误差还是检验误差,提出的量子激励的PSO算法比传统的PSO算法要小很多,从而表明量子激励的PSO算法有很强的学习能力和泛化能力.

图1 BP网络结构Fig.1 BP network
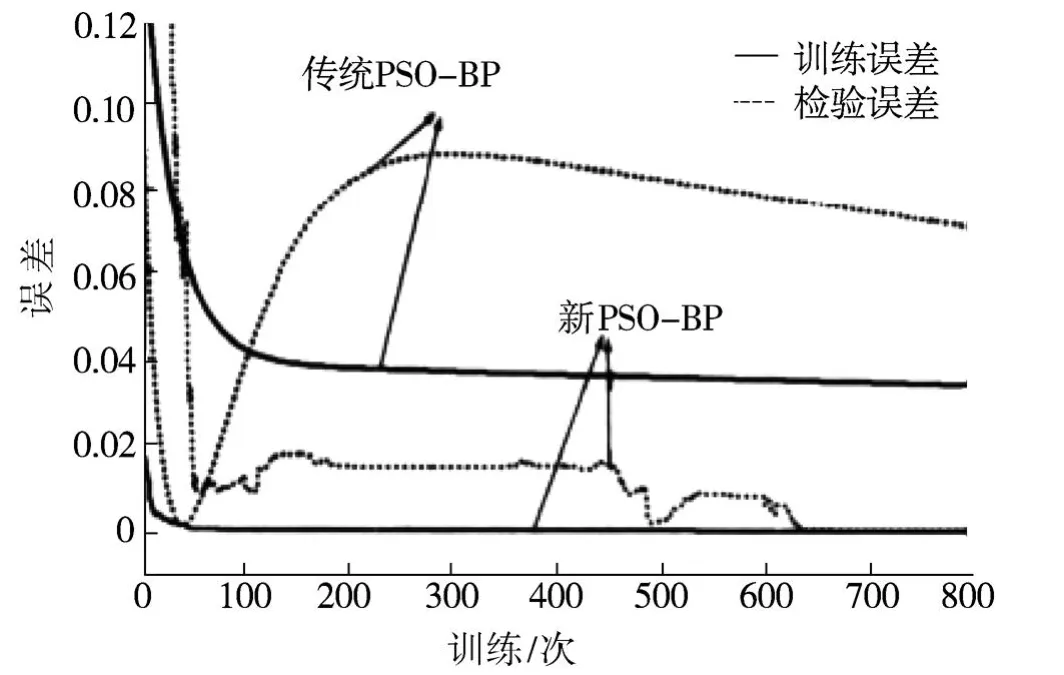
图2 量子激励PSO-BP与传统PSO-BP模型的误差对比Fig.2 Error com parison of quantum particle swarm optim ized BP network and particle swarm optim ized BP network
3 结论
由于BP神经网络具有很强的鲁棒性、容错性和自学习功能等,可以用作仿生机器马虚拟速度的预测,但其缺点是容易陷入局部极小,使得收敛效果不明显,本文在粒子群优化算法中引入量子论思想,克服了传统粒子群算法易陷入局部极值、优化效果较差的不足.使用该算法优化的BP网络实现对仿生机器马虚拟速度的预测.仿真结果表明采用改进的 PSO优化算法后的BP网络比传统的PSO优化的BP网络训练精度高,避免了陷入局部极小,可以更加准确的预测最佳的虚拟速度,使得机器马骑乘者在不同的虚拟速度时刻实现不同的骑马姿势,让身体协调运动,可以达到最佳的锻炼效果.
[1]BASHEER IA,HAJM EER M.A rtificial neural netwo rks:fundamentals,computing,design and application[J].Journal of M icrobiological Methods,2000,1(43):3-31.
[2]陈果.神经网络模型的预测精度影响因素分析及其优化[J].模式识别与人工智能,2005,18(5):528-534.
[3]王晶.蚁群算法优化前向神经网络的一种方法[J].计算机工程与应用,2006,42(25):53-55.
[4]师彪,李郁侠,于新花,等.改进粒子群-BP网络模型的短期电力负荷预测[J].计算机应用,2009,29(4):1036-1039.
[5]宋乃华,邢清华.一种新的基于粒群优化的BP网络学习算法[J].计算机工程,2006,32(14):181-183.
[6]任志刚,冯祖仁,柯良军,等.基于聚类分析的增强型蚁群算法[J].控制与决策,2010,25(8):1201-1206.
[7]田华,石圣羽,宗晓萍.基于不变矩特征及BP神经网络的图像模式识别[J].河北大学学报:自然科学版,2008,28(2):214-217.
[8]SUN Jun,FENGBin,XU Wenbo.Particle swarm op timization w ith particles having quantum behavio r[J].CEC2004 Evolutionary Computation Congress,2004(1):325-331.
Algorithm of BP Networks Based on Quantum Particle Swarm Optim ization
REN Yu-yan1,WANGHong-rui2,BAO Jie3
(1.Liren College,Yanshan University,Qinhuangdao 066004,China;2.College of Electronic and Information Engineering,Hebei University,Baoding 071002,China;3.Evaluating and Examining Center,State-Funded Construction Projects,NDRC,Beijing 100037,China)
A new method to adjust weights of BP netwo rk w as p roposed based on quantum particle swarm op timization.This algorithm combined concep ts of particle swarm and quantum p rincip les,w hich overcome the limitations both the local extreme values and op timization result bad by traditional particle sw arm op timization algo rithm,and got the best-op timized parameters of BP netwo rk.U se the op timized BP network to control themotion of bio-mimetic robotic horse.The simulation results show that this algorithm can achieve the best control effect quickly and accurately.
BP netwo rk;particle swarm op timization;quantum p rincip les;op timization;bio-m imetic robotic horse
TP 183
A
1000-1565(2011)04-0445-04
2010-11-06
科技部国际科技合作项目(2008DFR10530);河北省科技厅指导性计划项目(072135140);秦皇岛市科学技术研究与发展计划项目(201001A 064)
任玉艳(1978-),女,黑龙江虎林人,燕山大学讲师,博士,主要从事多传感器信息融合与智能算法方向研究.
E-mail:renyuyan2003@yahoo.com.cn
王兰英)