矿井提升机超同步串级调速控制研究
2011-12-08张晓凤张鹏惠
张晓凤 张鹏惠
矿井提升机超同步串级调速控制研究
张晓凤 张鹏惠
针对晶闸管串级调速控制系统存在的问题,提出了采用定子磁场定向的矢量控制技术的双PWM整流器的双馈串级调速方案,确定了整流器调制度,详细分析了系统运行过程。
矿井提升机;PWM整流器;矢量控制;串级调速
一 引言
随着电力电子技术和控制技术的发展,为绕线式异步电动机的调速控制提供了较大的发展空间,采用串级或双馈调速方式,在调速时可将转差功率回收利用,或者变为机械功率回馈到电机轴上,或者回馈电网,调速系统的效率较高。
与高压交流调速的定子控制对比,具有以下优点:一是高压调速,低压控制,经济、可靠;二是调速控制装置功率小于电动机功率,可以在调速范围内满足需求的前提下,减小控制装置的容量;三是调速控制与机械输出成并联关系,故障时可以短接转子绕组,旁路控制装置,使异步电动机运行于自然特性,提高系统运行可靠性。绕线式异步电动机的晶闸管串级调速系统,在调速范围要求不高的情况下,晶闸管装置的容量与电动机转差功率相当,调速装置的容量可大大减小,特别是转子电压为低压,整个调速系统的成本比变频调速方案低很多。但由于调速系统功率因数低、调速范围小及谐波抑制等问题,使其推广应用受到限制。
针对绕线异步电机的传统串级调速控制存在的问题,本文提出基于电压型双PWM整流器的串级调速方案,采用定子磁场定向的矢量控制技术。
二 系统控制原理
1.结构与工作原理。

图1 系统实验结构框图
图1所示系统实验结构框图,功率部分由转子侧和网侧PWM整流器组成,相应的控制部分,采用直流双闭环方式的定子磁场定向矢量控制。系统控制器除完成相应的控制算法、磁链观测器和驱动PWM脉冲波的形成与分配外,还设置速度差和电流的电平检测器及逻辑状态判别器,以控制电机在起动、加速、等速、减速和爬行各阶段双PWM整流器相应的工作状态。
2.整流器控制。PWM整流器作为一种新型整流器,可以克服晶闸管整流器输入电流谐波含量高、功率因数低、换相重叠严重等缺点,它结合PWM逆变控制技术,不仅可获得可控的AC/DC变换性能,而且可实现交流输入侧单位功率因数和正弦波电流控制。PWM整流器对输出电压和输出电流具有较强的控制能力,具有较高的功率密度和双向传递电能的能力,能实现输出电压的快速调节,以保证系统有良好的动态性能。
PWM整流器的主要作用,是在转子功率变化过程中,保持直流侧电压的相对稳定。网侧整流器系统参数和模型参数相对来说是比较稳定的,采用电动机定子电压(或电源电压)定向的矢量控制技术,可实现网侧整流器与电网之间的有功功率和无功功率传递的独立控制。PWM整流器电网电压定向矢量控制,可按直流系统的控制方式,采用电流内环和电压外环的级联双闭环控制方式。其中,电压环主要作用是控制直流侧电压,电流环则根据电压环输出的电流给定值控制交流输入电流。
3.整流器调制度确定。PWM整流器的控制技术主要体现在“间接电流控制”和“直接电流控制”两大方向上。直接电流控制策略以快速的电流响应和鲁棒性倍受关注,并针对固定输入已研究出各种不同的控制方案。当输入电源按一定规律发生变化时,电路参数的变化等因素直接影响控制方案的实施。本文通过改进的PWM整流器相位幅值控制方式,针对PWM整流器输入电流的动态响应慢、对系统参数变化灵敏等问题,分析研究了整流器输入前端电压滞后角δ与PWM整流器调制度m之间的关系。
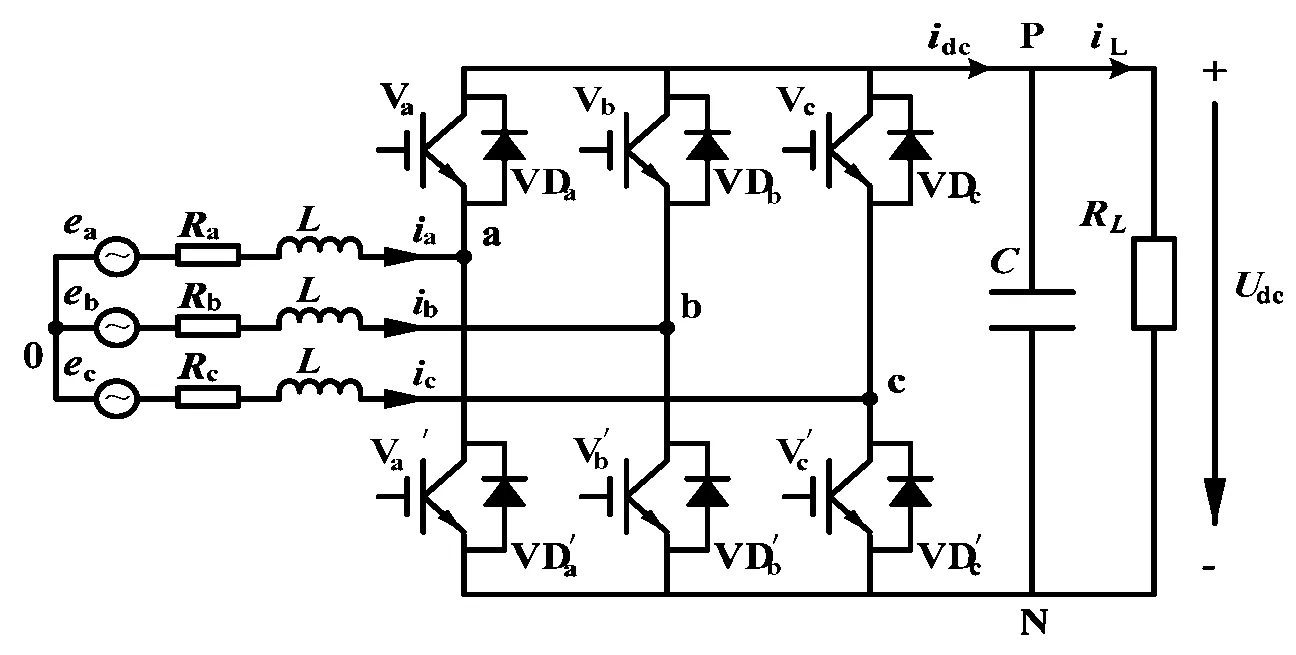
图2 三相电压型PWM整流器结构拓朴
图2所示电路为三相电压型PWM整流器拓朴结构,当调制度为m时,PWM整流器前端输入电压基波分量ura为
式中,Ura为整流器前端输入电压基波分量峰值。
因此,

通过调整PWM的调制度m和控制角δ,控制电感L上电压的相位,可以使输入电流基波分量的相位与输入电压相位相同或相反。
为避免过度调制,通常网侧整流器PWM调制度m1取为0.75,而转子侧整流器PWM调制度m2最大可取0.76,因此在理论上,6极绕线式异步电动机的调速范围可达0~2000r/min。
三 系统运行控制过程
矿井提升机运行状态有提升和下放两种,负荷包括人员、材料和矸石的提升和下放,综合各种情况,电动机运行基本可分为四个状态:亚同步电动运行,超同步再生制动运行,超同步电动运行和亚同步再生制动运行。
以矸石提升循环为例分析PWM整流器的工作状态。
速度给定环节按图3方式给出提升机运行速度图:
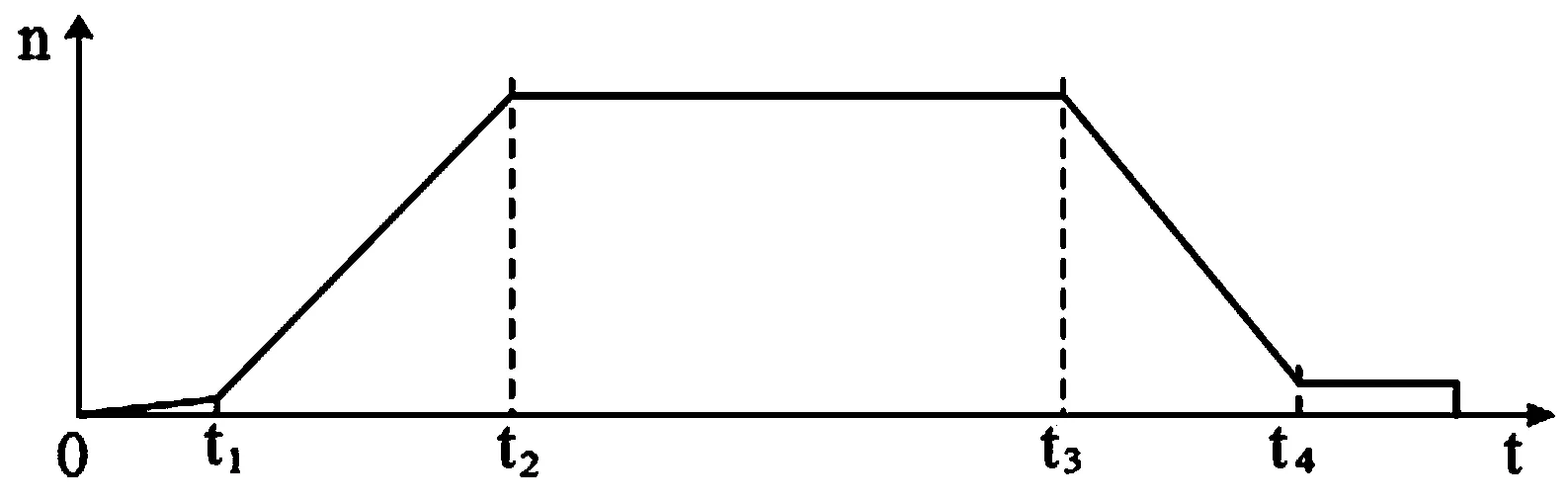
图3 提升机运行速度图
1.起动。为实现全范围调速,本系统采用直接起动,利用PWM整流器控制装置本身来直接起动电动机,而不用任何附加起动设备。起动控制时,网侧整流器先于电动机接通交流电网,然后接通电动机定子电源,此时转子呈开路状态,可防止因电动机起动时的合闸过电压通过转子回路损坏整流装置,最后将转子绕组与转子侧整流器接通。当转子回路接通时,由于转子整流电小于逆变电压,直流回路无电流,电动机尚不能起动,通过网侧PWM整流器交流输入电压的幅值和相位控制逐渐降低逆变电压,直流回路产生电流,电动机平稳加速,直至达到给定转速。
2.加速段运行。
(1)正力加速。加速开始,网侧整流器逆变作用与转子侧整流器整流作用相当,加强转子侧整流器整流作用,电动机从0加速。加速时,转子侧整流器工作在整流状态,网侧整流器工作在逆变状态,电动机转子转差功率由转子经转子侧整流器、网侧整流器、逆变变压器回馈电网。
(2)负力加速。负力加速过程,速度反馈值始终超前速度给定值,速度调节器在负偏差的作用下进行调节,转子侧整流器工作在逆变状态,网侧整流器工作在整流状态,转子转差功率由变压器经网侧整流器、转子侧整流器、定子回馈电网。
在初加速和主加速阶段,电动机工作于亚同步电动运行状态,实际速度小于给定速度,速度差gt;0,转子侧整流器工作在整流状态,网侧整流器工作在逆变状态。输入到电动机定子侧的电磁功率,一部分变为机械功率由电动机轴输出,另一部分变为转差功率,由整流器馈入电网。加速至同步速附近(同步速的95%左右——通过实验确定)时,切换整流器的工作状态,转子侧整流器工作在逆变状态,网侧整流器工作在整流状态,定子侧和整流器同时向电动机轴输入功率,电动机继续加速至同步转速或超同步运行。当电动机超同步运行时,Slt;0,转子侧整流器又工作在逆变状态,而网侧整流器工作在整流状态。
3.等速段运行。正力提升等速运行段,若转子电流小于转子额定电流的15%~20%或由于负载变化出现负力时,需重新投入串级调速装置,使系统在亚同步发电制动状态下运行,防止电机在自然特性上过渡到超同步发电制动状态运行,造成提升机在过减速点无法正常减速的后果,保证系统的安全运行。
负力运行等速段,串级调速装置参与全过程的调速控制。
4.减速段运行。区别于传统的晶闸管控制的串级调速系统,本系统可通过串级调速装置实现对提升机减速段的运行控制。
(1)正力提升等速运行减速控制。过减速点时投入串级调速装置,电动机由自然特性过渡到串级调速方式运行,由函数发生器给出减速图及爬行速度。转子侧整流器工作在整流状态,网侧整流器工作在逆变状态,转子电流减小,负载转矩大于电动机拖动转矩,提升机减速。转子电势随电机转速下降而增加,当电动机减速至速度反馈信号小于爬行给定速度信号时,在控制单元的作用下,使转子电流回升。当电动机速度反馈信号与爬行给定速度信号平衡时,减速控制结束,系统进入稳定爬行段。
(2)负力下放等速运行减速控制。同上,过减速点时由函数发生器给出减速图及爬行速度。转子侧整流器工作在逆变状态,网侧整流器工作在整流状态,直流回路电流增大,电动机拖动转矩小于负载转矩,提升机减速。在控制单元的作用下,当电动机速度反馈信号与爬行给定速度信号平衡时,减速控制结束,系统进入稳定爬行段。
在减速阶段,过减速点后,速度给定降至爬行速度,速度差lt;0。超同步转速下,由于Slt;0,转子侧整流器工作在整流状态,网侧整流器工作在逆变状态;减速至同步速以下,由于Sgt;0,转子侧整流器工作状态切换为逆变,网侧整流器工作在整流状态。减速至爬行速度时,由于惯性作用,速度差gt;0,转子侧整流器恢复整流状态,网侧整流器工作在逆变状态,电动机又进入电动运行状态。
四 结论
采用双PWM整流器构成的绕线式异步电机双馈串级调速系统,能够解决晶闸管串级调速控制存在的系统功率因数低、谐波污染等问题,可使调速系统调速在亚同步速、同步速及超同步转速宽范围内的平滑过度。定子磁场定向的矢量控制技术的应用,可解决因模型不精确及参数变化对系统调速性能的影响,提高对PWM整流器的可控性与控制精度,有进一步深入研究和推广应用价值。
[1]屈维谦.串级调速的再讨论[J].电气传动自动化,2007,29(3):1~6.
[2]李华德.交流调速控制系统[M].北京:电子工业出版社,2003.
[3] 戴晖,沈锦飞.基于定子磁链的双馈电机矢量控制系统的研究[J].电工电气,2010(8):5~8.
[4]张崇巍,张兴.PWM整流器及其控制[M].北京:机械工业出版社,2005.
ClassNo.:TD534DocumentMark:A
(责任编辑:蔡雪岚)
ResearchonSuper-synchronousCascadeControlofMineElevator
Zhang Xiaofeng Zhang Penghui
Considering the Static Kramer drive system and Static Scherbius drive system, the paper proposed the scheme of doubly fed cascade control system with double-side PWM rectifier which adopted vector control technology.The paper also introduced the running process of and the modulating relation.
mine hoist;PWM rectifier;vector control;cascade control
张晓凤,助理工程师,新汶矿业集团华丰煤矿,山东·泰安。研究方向:机电。邮政编码:271413
张鹏惠,助理工程师,鸡西矿业集团公司杏花煤矿选煤厂,黑龙江·鸡西。邮政编码:158173
1672-6758(2011)04-0061-2
TD534
A
