MHD角速度传感器磁场设计研究
2011-12-04霍红庆周海佳马勉军邱家稳
霍红庆,周海佳,马勉军,邱家稳
(1.兰州空间技术物理研究所,甘肃兰州730000;2.中国空间技术研究院,北京100086)
1 引言
随着空间对地观测、激光通讯、空间攻防等技术发展,对卫星和载荷的定位、跟踪和指向要求不断提高,对卫星平台稳定性控制也不断提高。卫星微角颤振高精度测量与控制是实现卫星平台与遥感系统等有效载荷高精度姿态指向的基础。为了获得高分辨率图像,对地观测卫星平台指向精度一般要求小于10 μrad;而光学与微波等遥感系统的指向精度一般要求小于 1 μrad,甚至要求达到 0.05 μrad[1,2]。
一般对于频率低于1 Hz的指向和角振动测控,航天器主要采用陀螺仪或光学系统作为参照来实现测控;而对于频率高于1 Hz的指向和微角振动测控与分析,目前的航天器则主要依赖于角度传感器(角位移、角速度和角加速度),其测控精度通常要求小于1 μrad[3]。
MHD角速度传感器是目前卫星平台用以测量微角颤振比较成熟的传感器,已经在国外多项任务中得到应用。磁场设计和分析是MHD角速度传感器研究的关键技术之一[4]。作者主要研究和设计了适用于高精度MHD角速度传感器的一种径向磁场。
2 MHD角速度传感器介绍
2.1 MHD角速度传感器的原理
MHD-ARS惯性角速度传感器工作原理基于磁流体动力学效应[5](Magneto-Hydro-Dynamics,简称MHD)。根据其磁场方式不同,可分为径向磁场方式和轴向磁场方式。
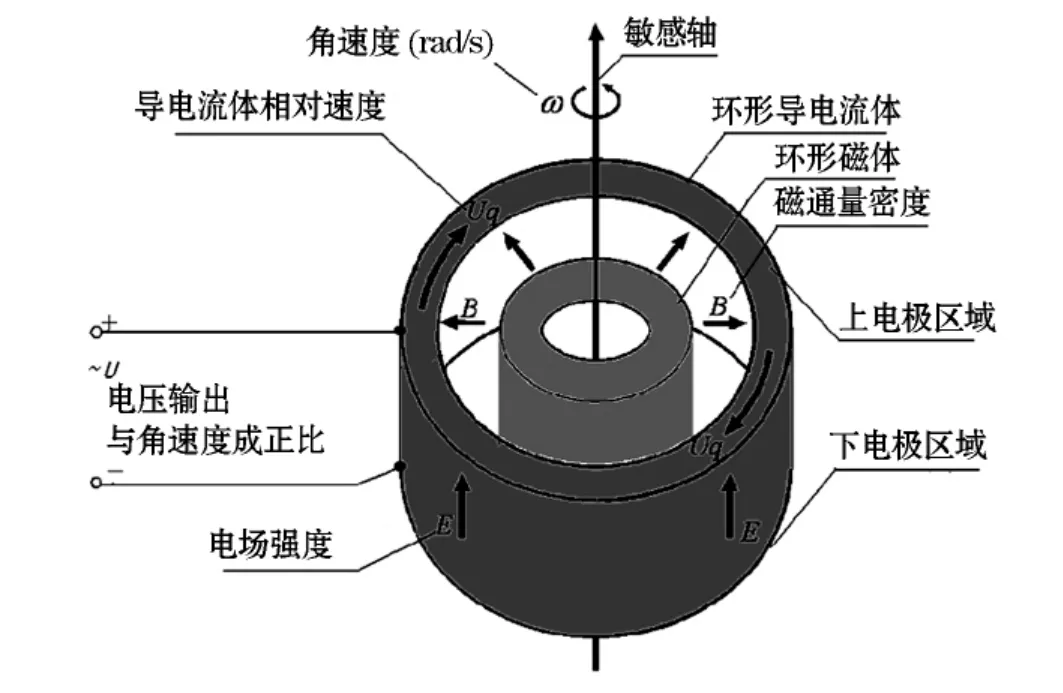
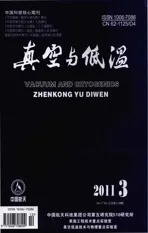
图1 MHD角速度传感器工作原理示意
以径向磁场方式为例,如图1中所示,环形导电流体作为惯性体,其运动方式为绕敏感轴方向旋转;磁感应强度方向为沿垂直敏感轴的半径方向。当有相对于传感器敏感轴的角速度产生时,由于导电流体的相对惯性大(可认为其相对静止),流体与磁体及固定框架部分之间产生相对运动。
由法拉第感生电势定律,导电液体垂直径向磁场B以U运动,则其两端产生电压E为

式中 Uφ为惯性导电液体与外壳的相对速度;Br为惯性导电液体处的磁感应强度。
又

式中 ω(t)为相对角速率;rrms为惯性液体的均方根半径。则总电压为上下两极板间产生的总电压和

这样,考虑导电液体为均匀液体,其沿Z轴向速度一致,且对称,则可表示为角速度的函数

式中 lz为上下电极间距离。
可见,此电势差Vz(t)与输入角速度成比例,经过后续电路放大处理可以被检测采集。
轴向磁场方式,如图2中所示,同样环形导电流体作为惯性体,其运动方式为绕敏感轴方向旋转;但磁感应强度方向为沿敏感轴方向。
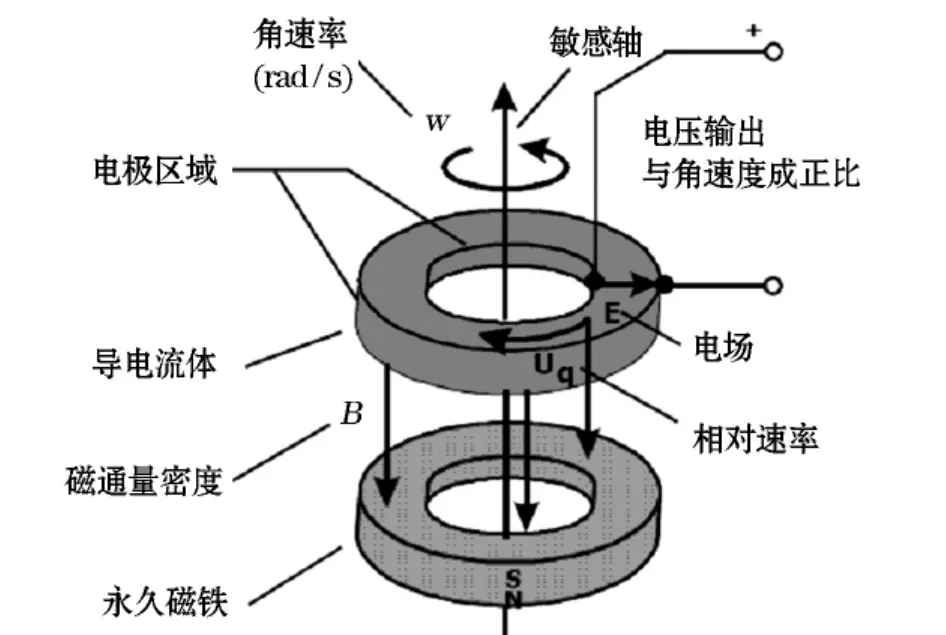
图2 轴向磁场MHD角速度传感器原理示意
当导电流体沿旋转轴运动时,在流体内外侧产生感生电势,电势值与旋转角速度成正比

式中 B为磁感应强度;h为导电流体环沿径向的间隙宽;Rrms为惯性液体的均方根半径。
同样,电势差与输入角速度成比例,可以被检测。
2.2 2种磁场方式MHD传感器介绍
美国ATA公司(Applied Technology Associates,U.S.A,简称ATA)应用2种原理,研制成功不同系列的角速度传感器,2种磁场方式典型传感器的性能指标见表1所列[6,7]。
对比2种方式传感器原理:轴向磁场方式,从式(4)可以看出,要增加信号强度,需要增大传感器直径,使体积增加因子增大,因而测量精度相对较差,不易提高;径向磁场方式,从式(5)可以看出,要增加信号强度,既可以增大传感器直径,也可以增加传感器高度,因而可以得到更高的测量精度。对比2种方式的传感器性能指标也显示在相近的体积条件下径向磁场传感器的测量精度更高。
由MHD角速度传感器的原理,磁场对2种方式的传感器都是主要影响因素,轴向磁场方式,磁场可以由永磁体直接产生,相对结构简单;而径向磁场方式,由于柱形永磁体(或环形永磁体)在径向产生的磁感应强度非常弱,所以不能直接由永磁体产生,磁场设计也成为其关键技术之一。
目前,随着我国卫星平台稳定性技术的发展,已经需要研究高精度分辨率水平(优于100 μrad/s)的测量传感器,所以,径向磁场方式的传感器更成为迫切的研究对象。
3 高精度MHD角速度传感器的径向磁场设计分析
本文径向磁场设计假设MHD传感器需要导电流体间隙处磁感应强度为0.2 T。
根据径向磁场方式MHD角速度传感器原理,径向磁场可以由永磁体产生磁场,进行导磁获得。设计磁路包括外导磁筒、外导磁体、永磁体、内导磁体、内导磁筒组成。磁场设计为上下对称结构,两反向极性磁场制造了充分零偶极矩的传感器。因此,传感器不对外产生任何外磁场,不会对其他设备产生磁影响[8]。设计磁路结构如图3所示。
磁路结构中,上下两部分存在微小气隙差别:在下导磁路部分,下导磁体与外导磁筒为一体设计;在上导磁路部分,上导磁体与外导磁筒为分体设计,在二者之间存在非常小的气隙,气隙小于10 μm,可以忽略其影响。所以理论分析此设计磁路结构为完全对称结构,可以看成2个完全独立的磁路。分析以下半部分磁路作为研究对象,忽略两者之间的相互影响。其磁路如图4所示(图中细箭头线表示漏磁线路)。
根据图4所示的磁通关系构建磁路图,得到等效磁路图[9],如图5所示。
根据等效磁路分析结果,永磁体设计选择钕铁硼(NdFeB)。永磁体磁性参数为Br>1.44 T,BHc>8.36×105A/m。
图3 设计的磁场结构示意图
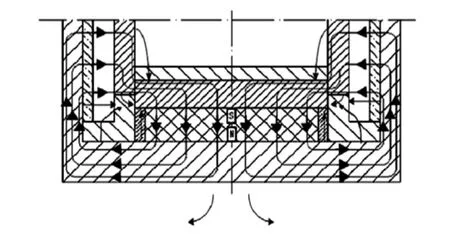
图4 设计磁场磁路示意图
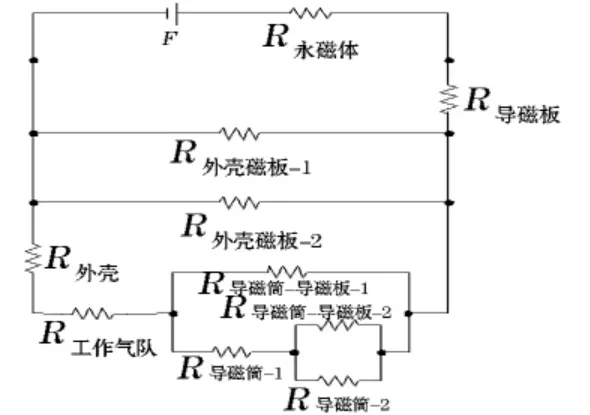
图5 等效磁路图
对设计磁场结构利用ANSYS模拟,模拟结果如图6所示。
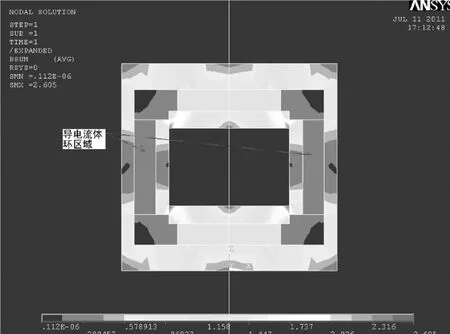
图6 设计磁场ANSYS分析模拟
为验证分析设计结果,作者在传感器结构加工组装后,利用数字特斯拉计对磁场进行了试验测量,与设计模拟结构进行了对比,模拟结果与测量结果对比如图7所示。
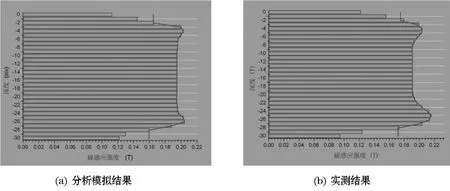
图7 导电流体间隙处磁感应强度分析结果与实测结果对比
从测试结果与分析结果对比,设计导电流体间隙处磁感应强度为0.2 T,模拟结果显示在中心高度18 mm区域内磁场稳定,磁感应强度为0.195 T;实测结果显示在中心高度15 mm区域内磁场稳定,磁感应强度为0.191 T;测试结果与设计模拟结果基本相符。
4 结论
根据MHD角速度传感器研究需要,设计了一种获得径向磁场的结构,结构包含薄柱形永磁体、导磁块、内外2个筒形导体,得到了MHD角速度传感器需要的径向磁场。在设计的导电流体间隙处,磁感应强度测试结果与设计模拟结果一致。
[1]LEE SHINHAK,ORTIZ G G.advanced ATP concepts and design for high data rate LEO-GEO optcomm transceiver[R].NASA report,Jan.2003.
[2]安源,许晖,金光,等.振动对动载体成像的影响及被动隔振技术的应用[J].半导体光电,2006,27(6):803#806.
[3]MORIO TOYOSHIMA.Transfer functions of microvibrational disturbances on a satellite[C].21st AIAA ICSSC and Exhibit,Yokohama,Japan,April 15-19,2003.
[4]霍红庆,马勉军,邱家稳,等.MHD角速度传感器在航天任务中的应用[J].真空与低温,2011,17(2):114#120.
[5]LAUGHLIN D,ANDREW A,ARDAMAN.Inertial angular rate sensoes:theory and applications[J].sensors,1992,9(10):20#24.
[6]ARS-01 & 01S MHD Angular Rate Sensor[EB/DL].2009-06-10 www.atasensors.com.
[7]ARS-12B MHD Angular Rate Sensor[EB/DL].2009-06-10 www.atasensors.com.
[8]LAUGHLIN.Magnetohydrodynamic angular rate sensor for measuring large angular rates[P].United States Patent 5067351.Nov.1991.
[9]林其任,赵佑民.磁路设计原理[M].北京:机械工业出版社,1987.