基于FPGA的双波束激光引信目标识别算法研究
2011-12-03严文康李传增王树山蒲荣辉
严文康, 李传增, 王树山, 蒲荣辉
(1.北京理工大学机电学院,北京100081;2.中国人民解放军第94789部队,江苏南京210022;3.国营5424厂,北京101149;4.国营732厂,山东 淄博 255201)
0 引言
舰载武器在执行反导作战任务时,由于弹目相对运动速度较大(通常达到2~6 M a以上),因此要求引信系统必须具有全向探测、快速识别、准确定位、精确控制炸点的功能,要实现上述功能,必须采用大视场探测体制,有效提高光束照射到目标的可能性和对目标的覆盖范围,以保证接收机有足够大的接收信号功率和信噪比[1]。
为在恶劣的天气条件下对低空掠海飞行的超音速目标给予致命性打击,美国提出的应用于舰载防空导弹引信的窄脉冲激光目标探测装置(Short Pulse Laser TDD)和“十一五”期间北京理工大学提出的双波束激光引信[2-5],均采用了两个具有一定前向倾角的大视场探测方式,以实现对目标的全方位探测。目前,如何有效识别目标是双波束激光引信亟待解决的关键问题之一,本文结合一定工程应用背景,提出了速度判断准则,基于FPGA技术采用VHDL语言编写了目标识别算法程序,并进行了程序的仿真、调试和实物测试。研究结果可为双波束激光引信抗干扰技术的进一步研究提供参考。
1 系统构成和工作原理
双波束激光引信是一种新型激光近炸引信,采用特殊的光束空间布局方式形成两个不同顶角的圆锥状激光探测场,对周围空间进行360°扫掠观测,当敏感到目标的存在时,基于速度判断准则的信号处理系统对来袭目标进行判断,进而确定战斗部最佳起爆时刻[5-7]。该引信主要由激光探测系统、信号处理系统、安全引爆系统和机械触发系统等组成,具有全向、前向探测功能,能够增加探测目标的概率;具有抗超低空严重海杂波(海浪)干扰的能力,保证了弹道安全;且可通过调整激光器与弹轴的倾角适配于多种类型的战斗部。
如图1所示,其具体作用过程是:两个不同波长、不同顶角的圆锥状激光探测场A和B,分别对称分布在弹轴两侧。弹目交会时,目标首先遇到光锥A,激光束经目标反射形成回波信号,并被相应的接收器捕捉到,经放大后送于信号处理系统,计时器开始计时。一段时间后,目标遇到光锥B,回波信号同样被相应的接收器捕捉,并经过处理送于信号处理系统,计时器停止,并与预先设定的时间范围进行比较,若在预定时间范围内,则确定为来袭目标。
图1 双波束激光引信模型样机及其探测原理示意图
2 目标识别算法
目标识别的主要目的是将目标与非目标进行区分,排除非目标回波信号的干扰,在海情较为复杂时,可采用距离截止技术首先对一般海浪进行滤除,然后对进入探测视野的浪尖采用速度判断准则进行二次过滤。通过目标与海浪之间的速度对比进而确定目标。双波束激光目标识别算法的流程图,如图2所示。
图2 目标识别算法流程图
双波束激光引信的信号处理系统主要由逻辑控制单元和起爆控制单元组成。其工作过程:实时计算目标穿过两个光锥的时间差,不断将当前的时间差与预定延时进行比较,一旦当前的时间差在预定延时的范围内,逻辑控制单元便自动默认为预定目标,并将目标的方位或距离信息传递给起爆控制单元进行炸点信息的解算,进而决定起爆时刻,及时引爆战斗部。发射前,预定延时信息需根据弹目交会状态和相对速度编程到引信信号处理系统电路中进行装定。
舰载武器反导弹药的典型目标是“飞鱼”类反舰导弹,该类目标在弹道末端一般以0.85 M a的速度在距海平面(5~15)m高度内低空掠海水平巡航,而舰载武器反导弹药与目标的交会状态通常为轴向迎击交会。因此,根据实际的弹目交会状态,对目标通过双波束激光探测场的时间差进行计算,为预定时间t的设定提供理论支撑。
当目标进入双波束激光探测视野时,具有两个空间边界点O1和O2,如图3所示。
图3 弹目交会示意图
假如目标通过第一个光锥的O1点时,计时器启动,在第二个光锥的O3点计时器停止。为保证光束对目标的有效覆盖,根据弹目轴向迎击交会特点,在相对速度坐标系内,双波束激光引信的可靠作用距离与脱靶量参数应满足如下关系:

则弹丸所走过的距离S为

式中:R为双波束激光引信的可靠作用距离;ρ为脱靶量;θ为脱靶方位角;Ω1、Ω2为激光器与弹轴之间的夹角。
2.1 电路实现
由式(2),若双波束激光近炸引信可靠作用距离为12 m,两个激光器倾角分别为 45°和 30°,弹目相对速度为680 m/s,则目标在双波束激光探测场中所经历的时间上限t max=6.57ms,选取一定的裕量,取为7 m s,即认为只要通过两个光锥的时间差小于7 ms就可判断为目标。考虑到系统的响应时间(信号累计至超过启动阈值的时间),设定时间差下限为tmin=2m s,则目标识别算法中的预定时间t=(2,7),并以此数据进行程序设计。本着电路实时性和小型化的原则,本文选用FPGA作为硬件设计平台,并使用 M AX+PLUSⅡ、QUARTUSⅡ、ISE作为设计工具,采用VHDL作为程序编写语言。根据目标识别算法流程图的要求,将电路划分为三个模块,即信号接收器、计时器和比较器。主要实现功能如下:当接收到start信号时,计时开始,接收到stop信号时,计时结束,并得到计时时间差,然后将时间差送入比较器与给定时间范围(二进制输入)进行比较,若在给定范围内,则LED灯亮(表明目标为预定目标),程序结束,否则返回重新等待计时,电路引脚如图4所示。
图4 目标识别算法数字电路引脚图
图4中各引脚和端口定义如下:clk为 50 MHz时钟信号输入端口;reset为手动复位信号输入引脚;start为探测器A接收到的激励信号;stop为探测器B接收到的停止信号;B1为用拨码开关输入初始比较值;LEDˉB为内部的比较信号(将输入B1信号取反后赋值);LED为比较结果信号,灯亮表示为来袭目标,反之相反;led1为计时信号,灯亮代表接收到了激励信号,计时器开始工作;Seg[7..0]为七段数码管显示信号。
2.2 仿真与测试
电路经布线后,设计工具能够给出该设计的详细延时信息,这些延时信息非常贴近FPGA的实际工作情况。根据这些复杂的延时信息,时序仿真将按照最坏的情况来分析电路的时序行为。目标识别算法的时序仿真波形,如图5所示。
图5中,第1行波形为输入时钟;第2行为复位信号;第3行为开始信号;第4行为停止信号;第5行为输入值;第6行为LED灯显示结果(低电平有效);第7行为计时灯显示标志;第8行为模块内部的计数值;第9行为计时结果输出显示。
将通过软件仿真的程序下载到ALTERA公司开发的CycloneⅡ系列(采用EP2C8Q 208芯片)通用FPGA开发板上对其进行测试。测试过程运行正常,显示结果如图6所示。
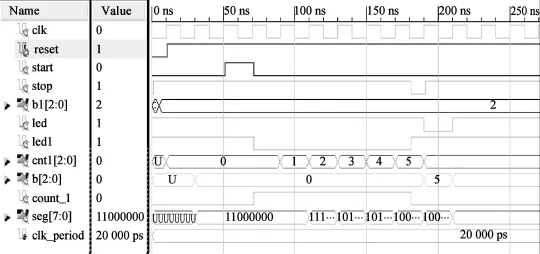
图5 目标识别算法的时序仿真图
初始时,计时器屏幕显示为“0”,当给出start(按键1)触发信号时,计时器开始计时,数码管正上方的二极管显示灯D2亮,表明计时器开始正常工作,经过一段时间的计时,当接收到“stop”信号时(按键2),计时停止计时,D2熄灭。当数码管显示时间在预定时间(2~7)ms之间时,二极管显示灯D1亮。若接收到“stop”触发信号时,没有在预定时间内,则计时器重新开始计时。经反复测试,系统运行正常,测试结果表明:基于双波束激光目标识别算法的信号处理系统能够在预定的时间内做出正确判断,该算法有效可行。
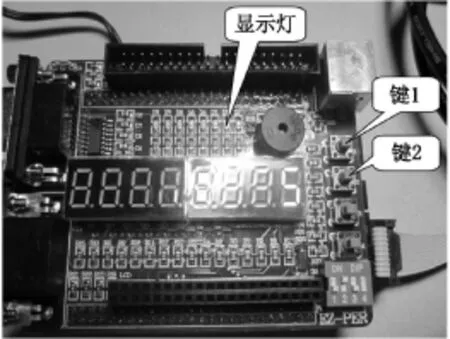
图6 程序测试结果
3 结论
针对舰载武器在执行反导作战任务时,通常采用的无线电近炸引信易受自然环境和人为因素干扰的特点,提出了双波束激光引信的概念,分析了其系统构成和作用原理;重点研究了双波束激光引信目标识别算法,提出了速度判断准则,基于FPGA技术采用VHDL语言编写了目标识别算法程序,并进行了程序的仿真、调试和实物测试,结果表明:基于双波束激光目标识别算法的信号处理系统能够在预定的时间内做出正确判断,初步验证了其原理的可行性。由于实验过程中不能真实模拟弹目的高速交会状态,所以无法验证系统工作的实时性,这将是目标识别算法进一步改进的方向和重点。
[1] 张正辉,杨明等.激光引信光束布局方式的选择与分析[J].红外与激光工程,2006,35(6):700-704.
[2] Randall D.Cope.Nava l Air Warfare Center Weapons Division[C].The 44thAnnual Fuze Conference,Pleasanton,CA.2000,(4):10-12.
[3] Steven E.Fow ler.Naval A ir Systems Command Fuzing Overview[C].The 45thAnnual Fuze Conference,Long Beach,CA.2001,(4):17.
[4] D r.John Robbins.United States Navy Overview[C].The 49thAnnual NDIA Fuze Conference,Seattle,WA.2005,(4):5-7.
[5] 李传增,王树山,韩磊.舰炮反导弹药双波束激光引信前向探测技术[C].中国兵工学会第十六届引信学术年会论文集,2009:233-237.
[6] LI Chuan-zeng,Han Lei,W ang Shu-shan,The Double Laser Beam Forw ard Detection Techniques for the Anti-m issile Projectiles o f the Naval Guns[J].SPIE,2009,7515.
[7] LI Chuan-zeng,W ang Shu-shan,H an Lei.Design o f PFM,PWM and PPM LD D river Circle for Dual Beam Laser Fuze[J].The IEEE 2010 International Sym posium on Photonics and Op toelectronics,2010.
