末敏弹调频毫米波雷达引信
2011-12-03刘水英王守林
刘水英, 李 鹏, 范 昕, 王守林
(引信动态特性国防科技重点实验室,陕西西安710065)
0 引言
末敏弹是一种通过火箭、火炮、航空撒布器带到目标区上空的子弹药,释放出来后,探测装置利用弹药的旋转和偏置悬挂在下落中扫描地面,搜索目标,启动爆炸成型侵彻体从顶部攻击装甲目标。
已有的末敏敏感器采用红外或毫米波被动探测目标,为了识别目标,需要加无线电测高装置,当使用毫米波测距时,还需要与被动探测方式分时工作。系统相对复杂,提高探测距离难度较大。本文提出的是一种全新的主动探测模式,采用调频连续波(FMCW)工作体制。
1 系统组成和工作原理
在末敏炮弹中应用时,要求毫米波探测器必须小型化,同时要满足重量和抗高过载的要求;要求天线口径小增益高,能有效地满足探测器对作用距离的要求,具有目标识别能力,成本不能太高。采用主动8mm调频连续波工作体制可以解决上述难题。主动调频连续波工作体制利用回波信号与发送信号的差频信号进行距离和目标检测。它的优点在于抗干扰能力强,能连续对地测距,距离分辨率高,且可进行目标识别,并且与脉冲测距相比较,功耗小,结构简单,造价较低,把它用作炮弹的末端传感装置是十分适用的。
毫米波探测器包括毫米波收发前端、天线和信号处理器。毫米波收发组件包括VCO、倍频器、功率放大器、功分器、低噪声放大器等[1]。雷达引信的总功能框图,如图1所示。
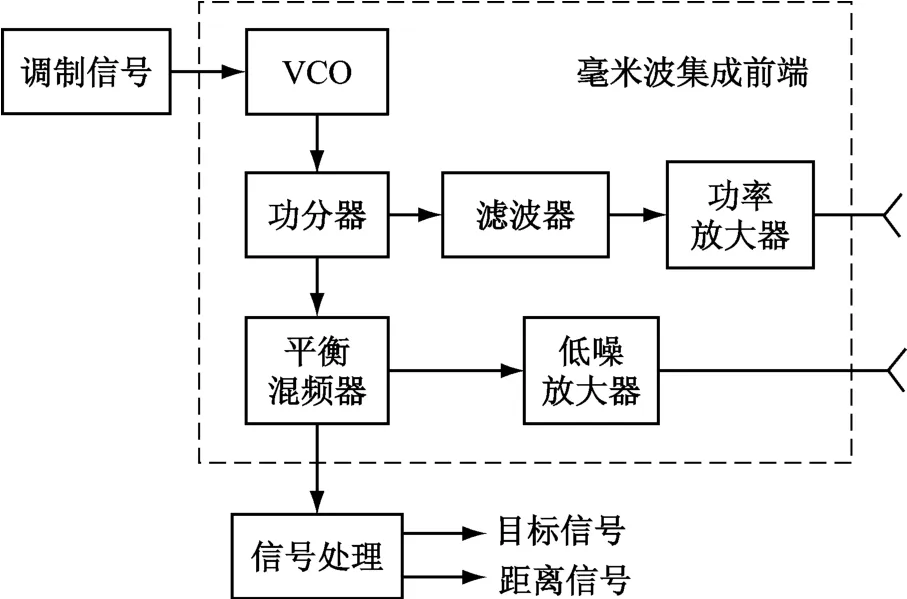
图1 雷达传感器功能框图
大致工作过程如下:VCO发射毫米波调频信号,经天线传向地面,天线扫描搜索地面,回波信号通过接收天线并进入混频器与部分发射信号混频,经过信号处理,输出距离信号,若检测到目标时同时输出目标信号。
毫米波收发组件是探测系统的核心,基于弹载武器对重量、体积等方面的严格要求,要实现毫米波探测器的小型化设计,采用基于MM IC的平面集成形式。
毫米波高稳定本振信号源采用四倍频锁相的方式产生:即采用DRVCO技术产生X波段的振荡信号,对其进行锁相后再倍频到毫米波频段。既保证了相位噪声要求,又解决了传统毫米波振荡器在振动时的散谱问题。毫米波前端体积可以小于Ф100 mm×10 mm,满足弹体的要求。
对于应用于复杂地杂波背景下的武器系统而言,地杂波是影响其性能特别是距离性能的一个最不利的因素,通过提高系统的距离分辨率和降低天线的波瓣宽度是行之有效的方法。利用软基片材料上的贴片构成的薄平面微带天线,符合探测目标的要求,并且可以和毫米波收发前端集成在一起,较好地满足本系统的需求。
2 探测距离和识别概率
根据雷达方程[2],探测器最大作用距离为
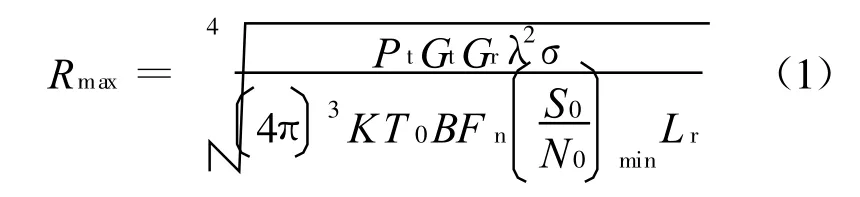
式中:K为波耳兹曼常数;T0为温度系数;S0/N0为信噪比;L r为传输损耗;G t G r为收发天线增益的乘积;λ为系统工作波长;σ为目标雷达横截面积;F n为接收机噪声系数;B为接收机带宽。
从公式看出,要增大测距能力的主要措施是增大发射功率Pt、增大天线增益GtGr,减少接收机带宽B,增大发射功率大大增加成本,体积也相应变大,显然不可取。增大天线增益,减少接收带宽是提高测距能力的关键。
假设发射功率P t为40 mW,雷达截面积σ为9 m2,接收机噪声小于3.5 dB,在只考虑噪声影响时系统的作用距离可超过240 m。
杂波是检测性能的限制因素,当地面杂波存在时,目标的检测显著依赖于探测器的俯角,从弹头攻击目标的观点看,俯角在45°~70°。假设俯角θ为 70°,粗糙地面的后向散射系数 σ0为0.1[3],φ=3π/180,采用文献[1]中的 RCS 公式,则杂波单元的 RCS 为 πφ2R2σ0/(4 sinθ)=2.3×10-4R2,目标的雷达截面等于在毫米波频率下对传感器呈现的实际面积,假设目标的雷达截面是9 m2,则杂波必须低于5m2,才能得到大约150m的最大引信距离。
雷达总是在噪声和其他干扰背景下检测目标,再加上复杂目标的回波信号本身也是起伏的,故接收机输出的是随机量,雷达作用距离也不是一个确定值而是统计值[3],对于一个雷达来讲,不能简单地说其作用距离是多少,通常只在概率意义上讲,当虚警概率和发现概率给定时的作用距离多大。
通过对毫米波散射特性研究,并对黄土地和混凝土等典型背景进行目标识别测试,在计算机上进行目标识别统计分析与比较,得到了以目标波形的幅值、宽度、高度、扫描转速、子弹及背景杂波等参数的统计识别模型。模型的目标识别置信度P计算公式为

式中:P为毫米波探测器的目标识别置信度;Pt为由扫描宽度得到的目标识别置信度;P v为由目标幅度得到的目标识别置信度;β、ξ均为加权系数,由识别统计模型确定。
任何目标都有一个最短长度,一个最长长度。当天线扫过目标时,有一个扫描宽度。这个宽度不但与弹的转速、弹目之间的距离、天线方向宽度等可直接计算参数有关,还与背景杂波、目标的RCS、弹的姿态摆动等统计参数有关。它的扫描宽度计算式为
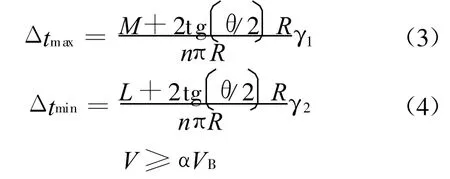
式中:Δt max为识别度为100%的最大扫描宽度;Δtmin为识别度为100%的最小扫描宽度;L为目标的最短长度;M为目标的最长长度;θ为天线与垂线的夹角;R为弹目之间的距离;n为弹的转速;γ1、γ2表示加权系数,由模型给定;V 为在Δt max或Δt min内的幅值;V B为背景信号的平均电平;α为加权系数,由模型给定。
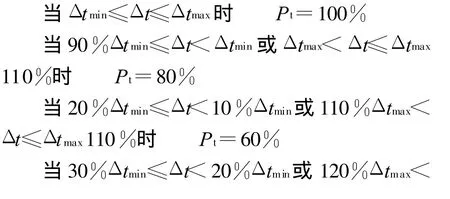
系统根据Δt的值确定P t的值。
用信号的幅值来识别目标更为困难。背景信号可能比目标还大,且目标本身因照射方位不同散射的信号强弱差异也较大。为了使用幅值特性能较好地识别目标,首先利用大量测试数据库,建立了统计规律;其次,在现场探测中,从150 m 弹目距离开始背景规律的寻找及背景平均电平的计算。雷达开始工作后,首先对背景杂波进行探测,以确定背景结构噪声的总体水平,并实时为目标信号的检测确立检测门限。获得可能的目标信号后,测量信号幅度与背景杂波水平的比值,同时测量信号波形的宽度,经子弹高度、扫描转速修正后与目标标准模板比较,如果满足统计意义上的匹配关系,则被判定为目标。
利用目标回波幅值进行PV的计算式为

式中:α为加权系数,由模型给定;VB为背景信号平均电平,V;V为ΔT内的幅值,V;k表示加权系数;ΔT表示目标信号V不小于αV B占用的时间,s;φ1,φ2表示加权系数,由模型给定;ΔT C表示采样周期,s;Vmax表示包络的最大幅值。
根据V max小于V Bφ2的程度或V max大于V Bφ1的程度确定P v值。
3 外场试验
利用研制的毫米波探测系统进行了外场试验,图2为150m距离处的地面回波信号,图3为150m距离处的卡车信号(归一化处理后)。为使实验结果更具代表性和实用性,按常规的扫描方法采用转台对目标进行扫查。为消除探测时由于转动系统及目标位置、尺寸大小等对波形幅度的影响,将采样波形作归一化处理。试验采用卡车为仿真目标,测得较稳定的回波信号。试验结果表明,采用调频连续波体制和系统、天线的合理设计,可以明显地提高系统探测动目标的能力,同时该工作模式可以满足系统对毫米波探测器作用距离的要求。
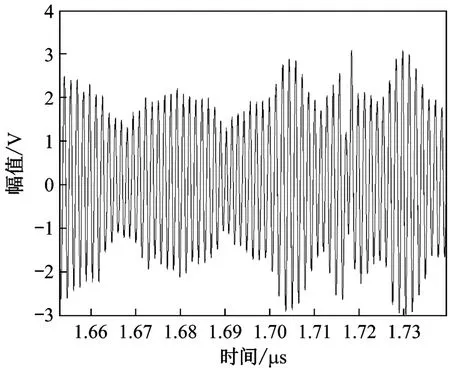
图2 150 m距离处的对地距离信号
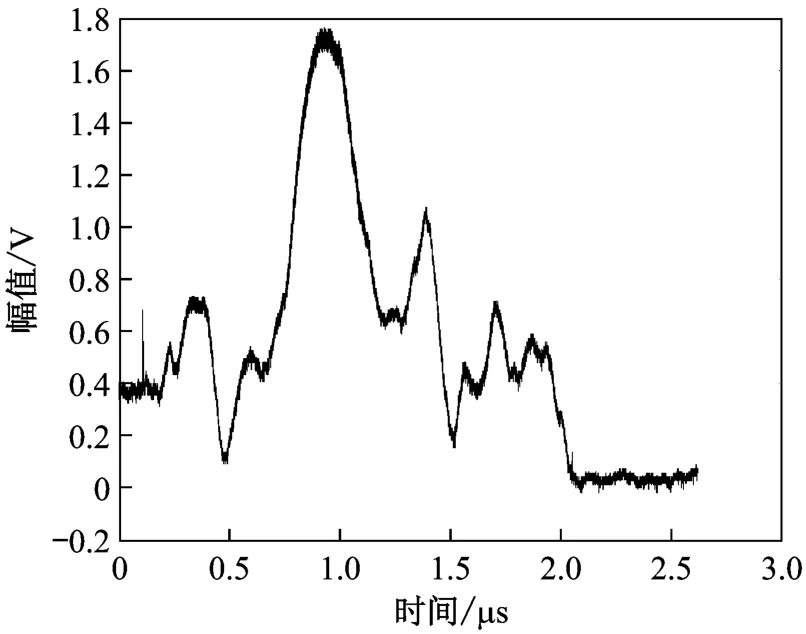
图3 150 m距离处的卡车信号
4 结论
通过分析和试验可以得出:采用线性调频连续波体制电源功耗小,系统结构简单,通过集成小型化设计可以保证系统满足弹体对体积和重量的要求,达到满意的探测距离和探测精度。
毫米波雷达引信突出的优点使其主要的潜在应用于要求结构小,重量轻、分辨力高,作用距离近、抗干扰能力强的场合[4]。它具有微波和光电两种系统的特性,它以这种方式来减小微波和光电系统的缺点,融合二者的优点,将其用作炮弹或导弹的末端传感装置是十分适用的。
[1] 邹涌泉 .Ka波段混合集成前端 .红外与毫米波学报[J].2002,21(6):477-480.
[2] 蔡希尧 .雷达系统概论[M].北京:科学出版社,1983.
[3] [美]M·W·朗 .陆地和海面的雷达波散射特性[M].北京:科学出版社,1981.
[4] 张玉铮.近炸引信设计原理[M].北京:北京理工大学出版社,1996.
