PD雷达导引头信息关联抗自卫式欺骗干扰技术
2011-12-03郑博,杜科
郑 博, 杜 科
(上海无线电设备研究所,上海200090)
0 引言
战场电磁环境日益复杂,干扰技术迅猛发展,不断向数字化、多样化、智能化方向前进。种类繁多的干扰已经严重威胁PD体制雷达制导系统的精确制导。为使我国PD雷达导引头在复杂电子战环境中充分发挥作用,开展雷达导引头抗干扰技术的研究是十分紧迫和必要的[1]。
自卫式欺骗干扰是精确模拟真实目标回波的一种干扰信号。敌机通过欺骗导弹的量测距离、量测速度等信息影响制导精度,从而达到保护自身目的。现阶段对于自卫式欺骗干扰的研究仅限于单重速度、距离欺骗干扰[2~4],而多重速度、距离欺骗干扰的研究较少。
本文提出一种PD雷达导引头抗欺骗干扰信息处理新技术,利用回波提取的多维信息(距离、速度、角度、幅度)以及多帧信号之间的相关性,通过数据关联、多点迹建立、点迹特征提取、目标/干扰识别等过程有效抵抗距离、速度欺骗干扰(单重/多重)。
1 自卫式速度、距离欺骗干扰特征
设PD雷达导引头的发射波形为

式中:f0为载频频率;μ为线性调频斜率(μ=0则为普通脉冲)。
多重距离拖引干扰,其m个拖引干扰回波信号波形为

式中:τi(t)为距离欺骗干扰的延时量,在检测过程中体现在时域上出现多个距离不同的目标。图1为多拖速距离拖引干扰。

图1 多拖速距离拖引干扰
而多重速度拖引干扰,其n个拖引干扰回波信号波形为

式中:f di为速度欺骗干扰的频偏量,在检测过程中体现在多普勒频域上出现多个速度不同的目标。图2为多拖速速度拖引干扰。
现有导引头抗干扰效果评估中,对于距离、速度欺骗干扰,只要导引头可以实施角跟踪就认为是有效抗干扰。但是错误的距离、速度信息仍然会影响制导精度。也有学者利用干扰信号能量较大的特点,干扰出现时,AGC电压突变,将大信号删除来抗干扰。然而,当多个干扰出现时,现有抗干扰方法将束手无策。

图2 多拖速速度拖引干扰
2 信息关联抗干扰算法
多重欺骗干扰在其距离或速度曲线中可以明显区分(如图1、图2所示)。故将雷达航迹理论融入到导引头数据处理中,利用PD雷达导引头各个时刻测量到的导弹-目标相对距离、导弹-目标相对速度、目标相对导引头天线的角误差等信息进行多帧信息关联,形成目标和导弹的相对点迹。
在PD雷达导引头跟踪目标过程中,将目标回波信息进行关联,形成目标和导弹的相对点迹。当欺骗干扰出现时,干扰的信号携带的导弹-目标相对距离、导弹-目标相对速度、目标相对导引头天线的角误差等信息与目标点迹不同,从而得到不同点迹。从点迹上可以很容易确定干扰的出现。
由于点迹携带了丰富的目标信息,利用目标与干扰之间特征差异,从而识别目标,剔除干扰。
2.1 信息关联抗干扰流程
在脉冲多普勒雷达导引头中利用信息关联思想抗干扰,加强了数据处理部分功能,而信号检测部分保持不变,主要包括:回波信号采样,距离门重排,按距离门FFT,时频二维恒虚警等模块[5]。而数据处理部分则见下图虚线部分,主要包括:信号关联模块、跟踪起始/终止模块、滤波预测模块、跟踪波门计算等部分。图3所示为信息关联抗干扰流程图。
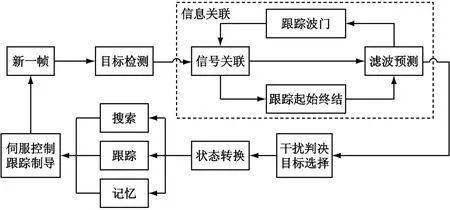
图3 信息关联抗干扰流程图
2.2 信息关联抗干扰功能模块
2.2.1 信息关联模块
(1)信号关联
信号关联主要任务是将每帧检测到的量测与已有点迹关联;在没有点迹的情况下,则将同一目标的多帧回波信号进行关联,进行点迹建立。
目前常用的信号关联算法主要有[6]:联合概率数据关联算法(JPDA),多假设方法(MH T)以及密集杂波环境下的数据关联快速算法(FAFDA)。不同算法因其假设前提不同,存在不同的适应条件,以及各自的利弊,在实际应用中则应该按具体情况合理选择。表1所示为关联算法特点总结。

表1 关联算法比较
(2)跟踪波门
本文采用的相关波门形成方法是在跟踪空间内定义一个矩形区域,即矩形波门。
假定量测维数为nz,新息向量v(k)、量测向量z(k)及量测的预测向量的第i个分量分别用表示,新息协方差S(k)的第i行第j列元素用Sij表示,当量测z(k)的所有分量均满足关系时,称该量测为候选回波。其中:K G为波门常数,在实际应用中往往取较大的值(K G≥3.5)。

新息向量vi(k)的范数为

在一定的假设条件下,可以证明,g(k)是服

假定高斯误差模型成立,在nz维量测和新息误差模型相互独立的条件下,正确量测落入矩形跟踪门概率为式中:V G为跟踪门的体积

正确量测位于跟踪门外的概率为

当所选P¯G较小时,有近似关系P¯G≈1-nz P¯G。
nz维矩形波门的面(体)积为
利用信息协方差矩阵的标准差进行归一化后得其面(体)积为

若不同分量对应的波门常数K G互不相同,则式(9)和式(10)分别为

本文仿真时选用矩形跟踪门+速度门辅助约束的方法对目标量测进行初选,以进一步减少相关波门内无关点迹的个数。
对一个被跟踪的目标来说,前后两帧之间目标的速度变化是连续的,不会产生大的突变。因此,可用一个速度门限将其限定在某个范围之内。

式中:a max表示目标机动加速度可能的最大值,可根据实际情况选择不同的值。仿真中a max=500 m/s2,矩形跟踪门常数K G=2.6,相应的门概率为P G=0.990 7。
(3)点迹起始/终止
本文在仿真时,采用基于顺序处理技术的一种点迹起始算法,可称之为直观滑窗方法。
假设(ri,vi),i=1,2,…,N为N次连续扫描获得的弹目距离—速度观测值,如果这N次扫描中有某M对观测值满足以下约束规则,那么该方法就认定应起始一条点迹。否则,滑窗右移一帧继续进行判定。
由于弹目距离观测值量化误差Er的存在,相邻两帧的弹目距离观测值之差为0或E r,即有

此时,目标速度的最大值为vmax=Er/T,T为帧间隔时间。
由于目标速度变化是连续的。因此,相邻两帧之间的目标速度不会产生突变,即有

式中:amax表示目标机动加速度可能的最大值,可根据实际情况选择不同的值。
直观滑窗方法计算简单,在没有真假目标先验信息的情况下,是较好的选择。
本文在仿真时采用点迹终结判断准则是连续K次扫描丢失目标决定点迹终结[7]。
2.2.2 干扰判决模块
干扰判决模块主要实现干扰信号的逻辑判断,若干扰出现时伴随着能量的急剧变化,导致能量较小的目标被淹没;若干扰出现时,能量没有出现明显变化,则同一时刻能够检测到目标和干扰两个信号。因此,可以根据AGC电平突变、及点迹个数与测量值个数的关系变化为判定依据,来确定滤波判断开始时刻。
从该时刻开始,根据每条点迹的滤波速度和测量速度是否匹配[8],作为点迹是目标或干扰的标志(速度-距离同步拖引干扰的判决方法将在后续工作中给出)。
3 实验仿真与结果分析
3.1 多重距离拖引干扰
设置目标初始距离25 km,速度900 m/s;每帧数据间隔15 m s,目标在每帧之间是连续的,干扰在每帧之间存在缺失。干扰1拖速为600 m/s,即实际速度为300 m/s,拖引时间为2.4 s;干扰2拖速为450 m/s,即实际速度为450 m/s,拖引时间为2.4 s;干扰3拖速为300m/s,即实际速度为600m/s,拖引时间为2.4 s。图4为三重距离拖引干扰点迹滤波。
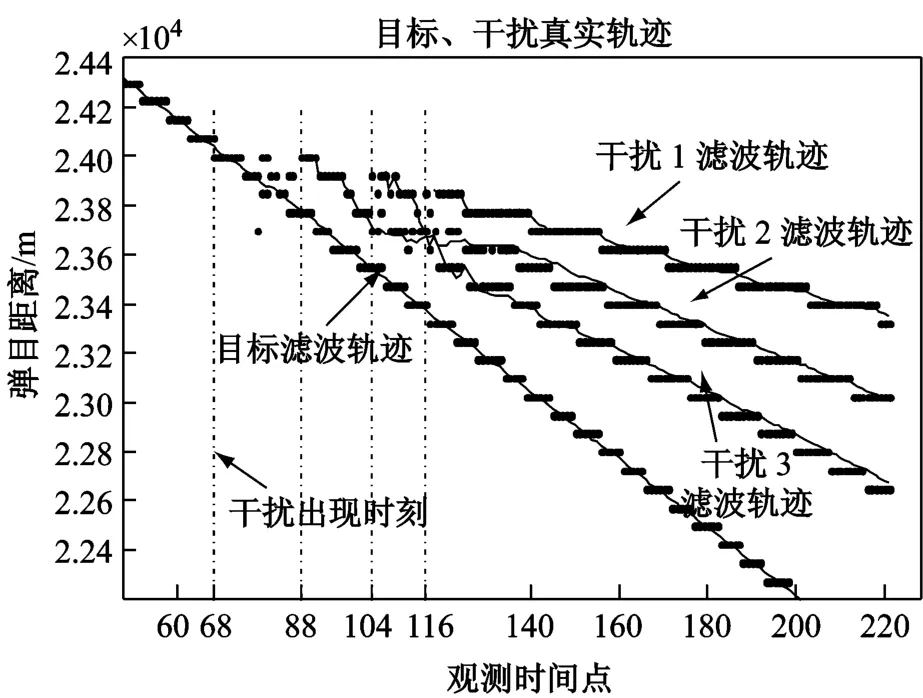
图4 三重距离拖引干扰点迹滤波图
由图可见,在干扰出现前,目标建立出稳定点迹。而在第68帧时刻同时出现三个干扰,在第88、104、116帧时刻,三个干扰先后被识别并跟踪。经过一段时间的点迹起始,三个干扰也形成稳定点迹。图5为目标和干扰的速度滤波结果。

图5 目标和干扰速度滤波结果
从图中可以得知,目标的滤波速度与点迹量测速度基本相同,而三个干扰的滤波速度与点迹量测速速度都存在不同程度的分离。所以区别干扰,只需通过滤波速度和量测速度的差值对比来识别,进而得到真实目标信号角度、速度、距离的信息并进行跟踪。
3.2 多重速度拖引干扰
设置目标初始距离25 km,速度600 m/s;同时施放三个速度拖引干扰,拖速分别为300 m/ss,150m/ss,225m/ss,间隔 5 s,拖5 s;每帧数据间隔10ms。图6为三重速度拖引干扰示意图。

图6 三重速度拖引干扰示意图
在第501帧时刻,同时出现三个干扰,由于初始阶段三个干扰速度和目标速度相互之间比较接近,关联滤波器无法区分干扰和目标,只能通过对每帧跟踪波门内的距离测量值进行概率加权获得一个等效的距离测量值,并利用该等效的距离测量值对原目标点迹进行更新。随着目标速度和干扰速度之间的差值逐渐增大,滤波器在503帧时刻开始区分出目标和干扰,并开始出现多条点迹。图7为跟目标和干扰点迹的滤波速度和点迹量测速速度之间的关系。


图7 目标和干扰速度滤波结果
虽然目标滤波曲线有一定波动,但是仍然可以清楚看到目标速度滤波曲线与速度量测曲线的差值在零附近波动;而速度拖引干扰的点迹滤波曲线与量测曲线存在较大差异。从上图可以清楚的区分目标与干扰,实现干扰剔除,进而得到真实目标信号角度、速度、距离的信息并进行跟踪。
4 结束语
本文通过信息关联数据处理方法抗自卫式欺骗干扰。将雷达航迹理论引入导引头中,利用目标回波信号多帧之间的关联特性,通过点迹建立分离干扰与目标;再通过目标与干扰在点迹上的一些特性差异加以判断,从而识别目标与干扰。
[1] 杨海林,郭爱芳,侯民胜.PD雷达抗速度欺骗干扰的计算机仿真[J].电子工程师,2005.
[2] 赵雪飞,赵川,刘峥.PD雷达抗距离-速度同步拖引干扰的频谱识别法[J].雷达对抗,2005(3).
[3] 侯民胜.雷达抗距离欺骗干扰的计算机仿真研究[J].电子工程师,2003,(9).
[4] 曾茂生.脉冲多普勒雷达技术特征及干扰方法的探讨[J].舰船电子对抗.2003,26(1):16-18.
[5] 高烽.雷达导引头概论[M].电子工业出版社,2010.
[6] Samuel.S.Blackman.M ultip le Target Tracking w ith Radar App lications[M].USA:A rtech House,1986.
[7] 陈琼,邱峰,王俊.一种实用的多目标航迹跟踪算法[J].火控雷达技术.2008(1).
[8] Faruk Kural.A M ethod for Detecting RGPO/VGPO Jamm ing[J].Signal Processing and Communiaction App lications Conference,IEEE,2004.
