月球着陆器软着陆冲击仿真
2011-11-26林轻聂宏陈金宝万峻麟李立春
林轻 聂宏 陈金宝 万峻麟 李立春
(南京航空航天大学,南京210016)
1 引言
软着陆缓冲机构是月球探测器着陆过程中重要的吸能装置,其主要功能是缓冲探测器在月面着陆时的冲击载荷,保证结构和有效载荷的安全,防止探测器倾倒并为其在月面工作提供可靠的支持。自20世纪60年代以来,月球探测器着陆过程动力学研究已在国内外广泛开展[1]。前期的研究工作主要围绕探测器3自由度、6自由度模型及软着陆单腿落震模型展开,视探测器为刚体结构,并将月面做刚性假设[2-3]。然而将探测器和月壤刚性化处理后仿真所获得结果并不能真实反映软着陆缓冲器的缓冲性能。随着我国月球探测的深入发展,探测器结构势必越来越大,内部装载势必增多,探测器机体及着陆腿的柔性随之增大,对缓冲机构工作影响明显。近年来,开始有学者对机体柔性、着陆腿柔性及月壤弹塑性变形对探测器着陆冲击性能的影响进行了研究。文献[4]建立了单条着陆腿柔性体模型;文献[5]建立了着陆腿结构为刚性的刚柔耦合动力学模型,研究了着陆器机体变形对着陆器着陆性能的影响,指出机体柔性变形会使着陆性能恶化。
综合该领域相关文献,大部分研究仅局限于着陆器和月壤刚性化处理或着陆器部分柔性化考虑,有关全机柔性化的文章未见相关报道。同样,运用瞬态动力学方法分析月球探测器软着陆冲击性能的研究也少见报道。MSC.DYTRAN是专门适用于高速瞬态非线性动力问题,特别适合于分析包含大变形、高度非线性和复杂的动态边界条件的瞬态动力学过程的非线性动态行为的数值仿真软件。本文将着陆器全机柔性化和瞬态动力学方法相结合,得到的仿真结果与试验结果相比较具有一定的一致性,为软着陆机构冲击性能的分析和研究提供了新的思路和方法。
2 着陆器模型柔性化研究
2.1 着陆器整机有限元柔性模型的建立
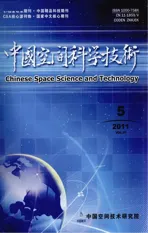
着陆器在月球表面软着陆的过程是整个探月计划中最重要、最危险的过程,因此着陆缓冲机构的设计尤为重要,一定要严格按照规定的设计要求进行设计和验证,本文主要以Apollo-11着陆器的着陆缓冲机构的设计要求为指导[6]。着陆器缓冲机构选用 “四腿-悬臂梁”构型,几何尺寸示意图如图1所示,具体尺寸参数见表1。
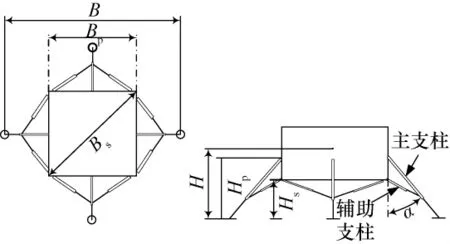
图1 “四腿-悬臂梁”构型着陆器示意图Fig.1 Diagram of lander's structure

表1 “四腿-悬臂梁”构型着陆器尺寸参数Tab.1 Dimensions of the lunar lander
月球着陆器全机有限元模型见图2,本文采用的是以铝蜂窝材料为基础设计的缓冲器。该种构型的缓冲器具有吸能性能好、质量轻、空间适应能力强,以及可靠性高等诸多优点。主缓冲器的吸能部分由两段不同强度的铝蜂窝芯子构成,分别对应不同的蜂窝压溃载荷和缓冲行程,辅助缓冲器拉伸或压缩时有效缓冲材料为铝蜂窝。与各向同性材料不同,铝蜂窝为可压扁正交各向异性材料,具有特殊的力学特性。在三维空间中,通常可认为铝蜂窝为可压扁正交各向异性材料。根据该材料的力学特性,可简略地把其压缩吸能过程分为3个阶段:1)铝蜂窝弹性阶段。此时铝蜂窝及其基体材料均未发生塑性变形,一般认为铝蜂窝承载达到峰值载荷前即为该阶段。2)铝蜂窝塑性阶段。此时铝蜂窝基体材料发生屈服类型的塑性变形,铝蜂窝开始整体受压塌陷,其范围为铝蜂窝承受峰值载荷后的承载水平阶段。3)铝蜂窝基体材料弹性阶段。此时,铝蜂窝整体塌陷完毕,可认为已被压实,从而进入基体材料的受压弹性阶段,该阶段即为铝蜂窝承载急剧增加阶段。其中,铝蜂窝塑性阶段是最为主要的能量吸收和耗散阶段,该阶段铝蜂窝载荷对变形的积分即为铝蜂窝材料最大的吸收并耗散能量值。
目前,对装配结构进行动力学分析时,由于需要处理的结合面的结合问题,不得不对模型进行简化,一般不考虑零件之间的实际装配关系。若用适当高度的块单元模拟时,则可获得较高的精度。但局部网格需要很密,且计算量大。为模拟球铰和万向节相邻构件的接触情况,采用节点耦合法比较合适。

图2 着陆器整机有限元模型Fig.2 Lander's finite element model
2.2 非线性接触问题
月面软着陆过程中,软着陆腿滑移或碰撞构件间及足垫与月壤间的相互作用通过接触算法来实现。本文主要采用主从接触面模型,根据非线性有限元软件进行计算,在每一个时间步检查从属面上的节点是否穿透主面,如果没有穿透,则计算继续进行;如果已经穿透,则在垂直于主面的方向上施加接触力阻止进一步穿透的发生。接触力的大小取决于穿透量的大小及主从面单元特性。
2.3 非线性摩擦问题
此外,软着陆时,在可能发生接触面相对运动的构件间以及足垫与月壤间会产生摩擦作用。这种摩擦作用属于动态摩擦问题,采用经典的库仑摩擦定律来进行摩擦力的近似计算。摩擦系数的定义为

式中μ为摩擦系数;μk为动摩擦系数;μs为静摩擦系数;β为指数衰减系数;v为主从面之间的相对滑动速度。
取月壤与足垫之间的静摩擦系数μs=0.5、动摩擦系数μk=0.4、指数衰减系数β=0.2。
取缓冲机构各部件之间的静摩擦系数μs=0.5、动摩擦系数μk=0.03、指数衰减系数β=0.1。
3 月壤模型柔性化研究
3.1 月壤柔性化理论研究
类似于地球土壤,月壤的动力学问题研究对象与静力学相似,其特殊性在于动载荷作用于月壤之上。也就是说,动载荷引起动力问题,也决定着动力问题的特点。着陆器在降落的过程中对月壤的冲击过程非常短暂,在0.1~0.2s内就完成了整个冲击,属于一次冲击载荷范畴。属于这一类型的月壤,其动强度要大于静强度。
美国宇航局兰利研究中心和美国陆军研究实验室两机构的研究人员提出了一种较准确的土壤模拟方法[7-8]。文献[7]中建立了一种地球土壤-球面接触有限元模型,采用了弹塑性材料模型模拟地球土壤,利用该模型经MSC.DYTRAN仿真所得到冲击加速度峰值与试验值较为吻合 (见图3),其中Ap为冲击加速度峰值经验公式,详见文献[7]。
从材料种类上来讲,月壤与干燥地球土壤的材料本构是相似的,因此可采用模拟地球干燥土壤的同类方法模拟月壤,即采用弹塑性材料模型模拟月壤。月壤材料模型采用DYTRAN中DYMAT24分段线性塑性材料本构模型,屈服模型采用冯·米塞斯双线性模型,参照松软砂材料性能取月壤近似属性。
该模型用于模拟应力-应变关系复杂的各向同性弹塑性材料。该类材料的应力-应变关系不能用通常的双线性曲线来模拟,需要定义一个表格函数用分段线性曲线来拟合材料的应力-应变关系,如图4所示。
每一时间步的计算过程中程序都从应力-应变关系图中根据当时的等效应变值通过线性插值计算出相应的应力值。
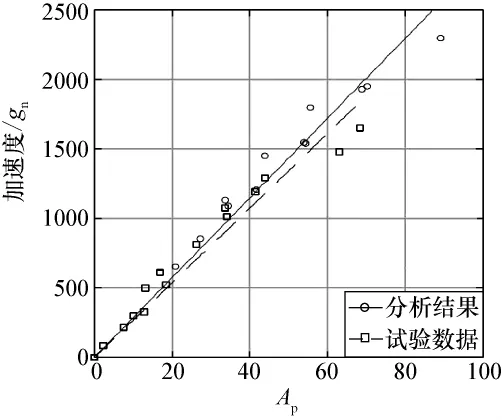
图3 地球土壤-球面碰撞有限元仿真与试验结果对比[7]Fig.3 Contrast of earth's soil-sphere collision finite element simulation and test results[7]
3.2 月壤柔性有限元模型
本文在MSC.PATRAN中建立月壤的实体模型,并对其进行网格划分。根据前面的理论分析,足垫与月壤的碰撞过程中,足垫与月壤接触的那部分月壤应该会发生塑性变形。因此,月壤建模的方法总结为4个要点:1)月壤尺寸应比足垫大5倍以上为佳;2)足垫为接触从面,有限单元要较规则细密,月壤上表面为接触主面,在其与足垫碰撞的区域有限单元的大小应尽量接近足垫有限单元大小;3)MSC.DYTRAN接触算法中接触因子应根据情况调整,接触速度较大时小的接触因子能使得接触力更平滑,而MSC.DYTRAN默认为0.1;4)采用模拟地球土壤的同类方法模拟月壤,即采用弹塑性材料模型模拟月壤。
根据对地球土壤的研究,着陆接触时主要应变和应力集中区域均在浅层,依据上述分析拟建立的月壤模型大小为1 5m×12m×1m,月壤属性参数见表2,月壤有限元模型见图5。
图4 应力-应变曲线示意图Fig.4 Stress-strain curve diagram

图5 月壤弹塑性模型Fig.5 Plastic model of lunar soil

表2 月壤属性参数Tab.2 Property parameters of lunar soil
4 仿真结果分析
4.1 仿真工况
着陆器全机有限元模型仿真工况为:月壤为倾斜角9°的斜坡,在地球重力加速度gn=9.8m/s2下,着陆器以水平速度1m/s,垂直速度4m/s,沿着月壤平面上坡采用 “1-2-1”形式着陆,即一个着陆腿先触地着陆,而后两个着陆腿同时着陆,最后一个着陆腿再触地的方式缓冲着陆。
4.2 机体加速度时域曲线分析
根据机体整体及内部结构布置情况,选取机体顶板刚性较好的中心点为测试响应点。考虑结构高频响应的影响,对仿真结果进行了相关处理,采用快速傅里叶变换对原始结果曲线进行了频谱处理,选取80Hz频率对原始数据进行了低通滤波处理。将仿真结果与全机试验结果进行了对比,如图6所示。
由图6所示,机体顶板中心点的加速度时域曲线波动较剧烈,幅值变化不大,冲击载荷大部分均在10gn以内,一般而言,着陆冲击载荷在10gn以内对着陆器机体结构及内部所搭载的仪器元件不发生破坏,均是安全的[9-10]。仿真结果与试验数据具有一定的一致性。在0~0.2s时,该响应点的加速度曲线在一定范围内波动,分析认为这是由于机体为柔性体,有其固有模态,是对单套着陆缓冲机构施加的激振力产生广泛的动力学响应而呈现出的一种物理现象。在0.21~0.3s时,该点加速度响应振荡增加,并达到响应峰值8.13gn。分析认为:着陆前期 (0~0.2s)蜂窝吸收了大部分着陆器动能,机体柔性吸收小部分着陆器动能,因此机体所受冲击载荷较小。0.2s之后,蜂窝吸能压溃完毕,着陆器机体及着陆腿结构柔性吸收了着陆器的动能,从而机体所受载荷较大,由图6可见,在0.2s时蜂窝完成吸能压溃。
4.3 主缓冲机构吸能缓冲性能分析
主缓冲器主要用于缓冲垂直月面着陆冲击载荷,吸能部分由两段不同强度的铝蜂窝芯子构成,分别对应不同的蜂窝压溃载荷和缓冲行程,分为弱蜂窝和强蜂窝。弱蜂窝设计为能够刚好完全吸收探测器在理想着陆速度和4个着陆腿同时着陆时的着陆冲击能量,强蜂窝的主要目的是吸收着陆器其他着陆姿态着陆时相对更大的冲击能量,并具有一定的抗坠毁吸能能力。仿真的缓冲性能曲线见图7,图中按4个主缓冲机构按触地吸能先后顺序排列。

图6 机体加速度时域图Fig.6 Lander body acceleration time-domain graph

图7 主缓冲机构缓冲性能曲线Fig.7 Buffer performance of the main bufferings
根据前期的试验数据,单个主缓冲机构中弱蜂窝最大吸能为1 800J,强蜂窝最大吸能为5 850J。由图7可见,当着陆器以 “1-2-1”工况着落时,第一个着陆腿先着陆,受到的冲击最大,同时也是吸能最多,弱蜂窝吸能能力达到极限,全部被压溃,而后强蜂窝开始吸能。随后两个着陆腿触地着陆,弱蜂窝也吸收了一定的能量,但没有被全部压溃,因此强蜂窝基本上没有吸能。最后一个着陆腿着陆缓冲所吸收的能量最少,在0.19s左右弱蜂窝基本完成压溃吸能。
5 结束语
1)经与试验数据结果相对比,采用非线性瞬态动力学方法研究月球着陆器着陆冲击性能是一种有效的数值方法。该分析方法充分地考虑着陆器结构和月壤的柔性,部件间接触和摩擦等诸多非线性因素,仿真得到的结果比较准确可靠。
2)通过对月壤柔性化的研究,提出月壤柔性体材料模型采用分段线性塑性材料本构模型,屈服模型采用冯·米塞斯双线性模型。仿真结果与试验数据具有一定的一致性,从而验证了该模型基本正确。该月壤有限元模型研究尚属初步探索阶段,建议进一步加强月壤方面的研究 (如月壤材料属性及月壤动力学等),建立更加精确高效的月壤柔性体有限元模型。
3)从试验结果来看,铝蜂窝具有良好的吸能缓冲特性。着陆器在着陆的过程中,铝蜂窝能充分地吸收着陆冲击能量,保证了着陆器的安全着陆。
[1]刘志全,黄传平.月球探测器软着陆机构发展综述[J].中国空间科学技术,2006,26(1):33-39.LIU ZHIQUAN,HUANG CHUANPING.Review of the development of soft-landing mechanisms for lunar explorations[J].Chinese Space Science and Technology,2006,26(1):33-39.
[2]邓宗全,王少纯,高海波,等.基于ADAMS平台的月球着陆器上限振幅研究[J].哈尔滨工业大学学报,2003,35(12):1492-1495.DENG ZONGQUAN,WANG SHAOCHUN,GAO HAIBO,et al.Upper limit amplitude of lunar lander based on ADAMS software[J].Journal of Harbin Institute of Technology,2003,35(12):1492-1495.
[3]MASAHIRO NOHIM,AKIRA MIYAHALA.Modeling for lunar lander by mechanical dynamics software[C].AIAA Modeling and Simulation Technologies Conference and Exhibit,San Francisco,California,AIAA-2005-6416,2005:1-9.
[4]万峻麟,聂宏,李立春,等.基于瞬态动力学方法的月球探测器软着陆腿着陆冲击性能分析[J].兵工学报,2010,31(5):567-573.WAN JUNLIN,NIE HONG,LI LICHUN,et al.Analysis of the landing impact performance for lunar landing leg with transient dynamic method[J].Acta Armamentaria,2010,31(5):567-573.
[5]陈金宝,聂宏,柏合民,等.月壤及缓冲支柱弹塑性变形对探测器着陆性能影响分析[J].机械科学与技术,2008,27(12):1572-1575.CHEN JINBAO,NIE HONG,BAI HEMIN,et al.A study of the performance of lunar landing considering the deformation of the buffering struts and the lunar soil[J].Mechanical Science and Technology for Aerospace Engineering,2008,27(12):1572-1575.
[6]WILLIAM F ROGERS.Apollo experience report-lunar module landing gear subsystem,TN D-6850[R].NASA,1972.
[7]EDWINL FASANELLA,YVONNE JONES.Low-velocity earth-penetration test and analysis[C].AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and Materials Conference and Exhibit,Seattle,Washington,AIAA-2001-1388,2001.
[8]KLOSKY J LEDLIE,STEIN STURE,HON YIM KO,et al.Mechanical properties of JSC-1lunar regolith simulant[C]//Proceedings of the International Conference on Engineering,Construction,and Operations in Space,1996,(1):680-688.
[9]TAYLOR INC.Investigation of the application of airbag to provide soft landing[C].AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar,Boston,New Jersey:AIAA,2001:2001-2045.
[10]SPERLING F B.The surveyor shock absorber[R].Washington:Jet Propulsion Laboratory,1968.