手控交会对接任务中显示-控制系统的工效学研究
2011-11-20王春慧
王春慧 蒋 婷
(中国航天员科研训练中心)
1 引言
继出舱活动任务之后,我国将突破交会对接技术作为载人航天二步一阶段的重点任务。交会对接技术是一项十分复杂、难度很高的航天技术,是完成其他后续航天任务的关键步骤和先决条件。根据航天员和飞船自控系统参与程度的不同,交会对接包括自动控制和手动控制两种。美国较多地应用手控方式,而俄罗斯则主要采用自控方式,但自控方式并不排斥手控方式,美、俄也在充分利用手控和自控相结合带来的好处,并且不断提高和改进手动控制系统,使之日臻完善。自20世纪60年代以来,美、俄主要航天大国已进行了200多次的空间交会对接活动,其中已应用手控交会对接技术完成了大量的空间站维修和组织、乘员的轮换、货物的补给、卫星的捕获等一系列空间活动。
在手控交会对接中,由于人具有观察、分析、判断、决策和处理能力,手控交会对接任务中,航天员能够对系统中出现的故障进行及时地判断和决策,从而有效地提高任务的成功率。但是,航天员在手控交会对接任务中的工作负荷和心理压力很大,首先,航天员在短时间内要对有限的观察视景和大量参数信息进行搜索和加工,从而判断两航天器的相对位置和速度;其次,航天员要同时控制飞船,将两航天器的相对位置及速度控制在要求的精度范围内,从而保障对接机构能够顺利捕获并完成对接;此外,还要受到任务实施时测控通信时间窗口和燃料消耗的约束条件限制。
为了有效保障手控交会对接任务的成功率,除了在选拔和训练中提高航天员的观察能力、情景意识、控制能力外,还应优化显示-控制系统人机界面设计,使之与航天员的能力相匹配,保证航天员高效、可靠地完成观察和操作。
2 手控交会对接工效学研究内容
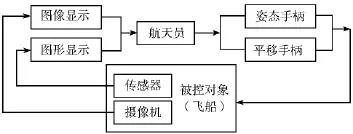
图1 手控交会对接的人-显示-控制系统
手控交会对接系统是一个典型的有人参与的人-显示-控制系统,如图1所示。手控交会对接过程中,航天员在飞船中,通过观察显示界面中的各种参数和图像信息,来判断飞船和目标航天器的相对位置和姿态关系,通过操作控制手柄来控制飞船的运动,从而实现两个航天器的交会和对接。
人-显示-控制系统中,显示界面、控制系统与人的能力的匹配程度决定了系统的操作绩效。因此,需要针对手控交会对接任务中的显示-控制系统开展工效学实验研究,探索针对整个人控回路绩效评估的评价指标和方法。为手控交会对接任务中飞船的工程设计、程序安排、人员分工等方面提出工效学的设计要求,为显示-控制系统评价提供有效的指标系统和方法。
2.1 显示界面
在手控交会对接高工作负荷的情况下,航天员要在极短的时间内,完成信息的搜索、判读、决策等一系列认知活动,因此,信息的显示内容、方式及布局等方面是否符合航天员的认知习惯,直接影响到航天员判断和决策的正确性。
(1)由于手控交会对接过程中,航天员需关注的信息量很大,必须对航天员所需的信息显示内容及重要等级进行了分析,以降低航天员的脑力负荷。
(2)目标航天器靶标图像信息是航天员进行手控交会对接最主要的观察信息,需要对靶标图像(靶标在图像中呈现的尺寸、形状、颜色和标志点等信息)及标尺信息的可判读性开展相关研究。
(3)除了图像信息外,航天员还需要观察大量的数值信息,例如时间、燃料消耗、位移及姿态、速度等。因此,需要对数值信息的显示方式、显示精度、页面布局等方面开展研究,以增强航天员的情景意识,降低工作负荷,缩短判断和决策的时间。
2.2 控制系统
手控交会对接过程中航天员通过操作手柄来控制飞船实现两个航天器的交会对接,航天员控制能力与飞船的控制特性的匹配性是决定航天员能否成功操控飞船完成交会对接任务的关键。
(1)航天员与飞船的操控界面是控制手柄,需要针对手柄的极性、控制方式等方面开展研究,使控制手柄的特性与航天员的认知及操作习惯一致,从而保障航天员以最快的反应速度对航天器实施操控。
(2)针对飞船的控制延时、姿态最大的控制量、自控转手控交会对接初始偏差的边界条件等方面开展研究,保证飞船的控制特性与航天员的控制能力相匹配,从而减少航天员的作业负荷。
2.3 人控回路的评价指标及方法
手控交会对接是有人参与的任务,整个过程是一个典型的人控回路,回路中人、显示界面和控制系统相互匹配程度的高低决定了交会对接任务的完成绩效。因此,有必要对整个人控回路的绩效进行评估,针对手控交会对接,开展评价指标和评价方法的研究。
3 半物理仿真实验平台
为了研究上述手控交会对接工效学问题,构建了半物理的仿真实验平台,用以模拟最后150m的手控交会对接过程,并提供相对真实的手控交会对接人机界面。
该平台建立了模拟座舱,在舱内安装了座椅、仪表板、控制手柄,其外形、性能状态及相对位置为真实状态。交会对接动力学和显示界面主要以仿真的方法建立,并使其具有一定的真实性。
此外,该实验平台为了满足工效实验研究的需求,其人机界面硬件和软件的设计参数为可调节的,例如手柄的安装位置、显示界面中显示内容、显示方式、布局方式、布局位置、动力学参数、对接靶标、标尺、摄像机视场角、对接初始条件等。
4 手控交会对接实验研究
针对手控交会对接工效学问题,在半物理仿真实验平台中,开展了参试者培训、显示界面方案、控制系统特性参数、评价指标和方法等近3500人次的手控交会对接实验研究。
4.1 显示界面的实验研究
(1)针对信息显示内容和重要性等级,在显示界面中设计显示各种数值信息,包括两航天器轴向距离及速度、六个自由度的偏差、速度及加速度、控制时间、燃料消耗、视场状态等,让参试者通过观察这些信息来完成交会对接操作。利用眼动跟踪技术,通过参试者的眼动轨迹和注视时间等指标来分析受试者在不同阶段对数值信息的关注程度,并在实验后收集参试者的主观感受;
(2)针对目标航天器靶标图像及标尺的可读性,设计了实验方案和对照方案,如图2所示。对两组方案中的十字架的长度、底盘刻度设计、刻度与底盘边缘间隔、标尺刻度等级、粗细及颜色等方面进行比对分析。通过对参试者的主观感受和两组方案的操作精度和绩效进行差异性分析,比较两组方案的优劣;
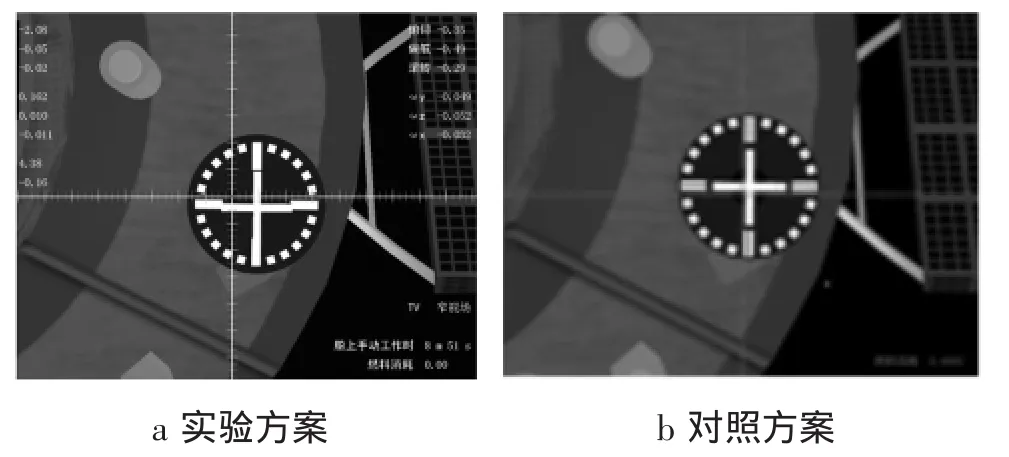
图2 靶标及标尺实验方案
(3)针对图形化信息显示方式,采用两个象形物来分别表示位移和姿态的控制偏差,根据六个自由度的坐标轴的布局设计了分离式和组合式两种图形化显示方案,如图3所示。通过参试者主观感受、操作精度和绩效来分析方案及各要素的优劣。
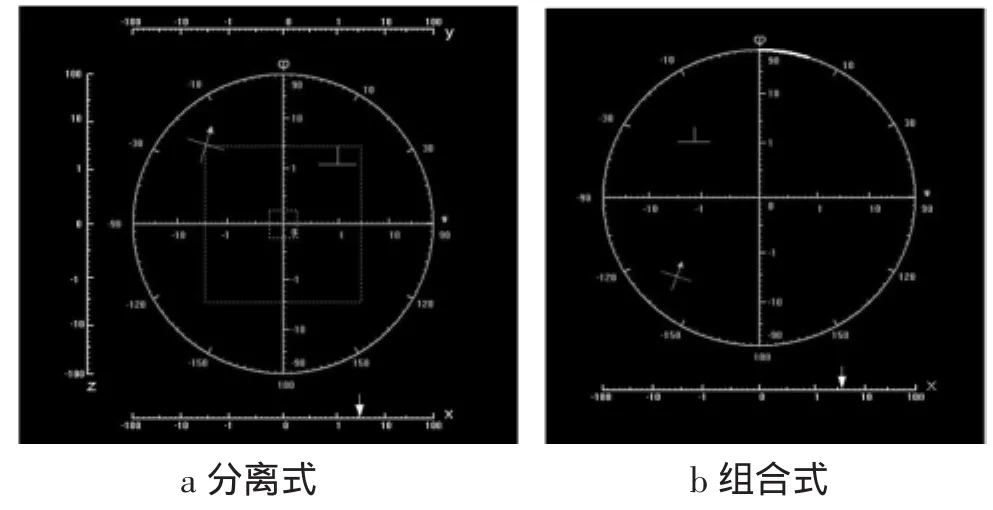
图3 图形显示形式方案
4.2 控制系统的实验研究
控制系统相关研究内容主要是摸索控制系统特性参数中,与人的控制能力相匹配的边界值。
(1)针对控制手柄的极性,分别针对上下、左右、俯仰和偏航四个自由度的操作极性,设计了共五种手柄极性的状态。通过对这五种状态下参试者操作精度和绩效进行差异性分析,来确定操作精度和绩效最优的极性状态。
(2)针对控制系统延时,对系统延时参数设置了0s、1s和2s三个水平。通过操作精度及绩效来分析不同水平的系统延时对参试者操作的影响程度,并与参试者的主观感受相比较。
(3)针对姿态控制最大角速度,对字体控制最大角速度参数设置了 0.3°/s、0.5°/s和 0.6°/s三个水平。
(4)针对自控转手控交会对接初始条件,分别在100m、50m、30m和20m的轴向距离上,设置初始边界为位移偏差8m、姿态偏差10°,轴向初始速度分别为0.3m/s和0.5m/s。
4.4 评价指标及方法的实验研究
评价指标和评价方法是通过对不同实验状态下绩效指标的变化规律、相关性等特性的分析,对绩效指标(包括成功率、控制时间、燃料消耗、累计偏差、平均偏差、平均速度、最大速度和进入对接准入条件的距离等)进行筛选,确定敏感指标。根据客观绩效指标的内在规律摸索和确定赋权方法并建立评价模型。
为了对指标体系和模型进行验证,设计了验证实验:正常手控交会对接任务的实验状态和添加了副作业的实验状态的比对实验,用于验证指标体系和评价模型的效度和信度。
5 研究结果
通过实验数据的分析,得到以下研究结果:
5.1 信息显示的研究结果
通过对显示信息内容、图形化信息显示形式和靶标图像信息的实验研究,可以得出:
(1)信息显示内容及重要性等级实验中主观问卷和眼动分析指标的数据表明:受试者在手控交会对接不同阶段关注的信息不同,同一阶段对不同信息的关注程度也是不一样的,其中两航天器的轴向距离和速度最重要,其次为两航天器六个自由度的相对偏差和速度、控制时间及燃料消耗等信息。因此,工程设计中应尽可能将两航天器的轴向距离和速度信息呈现给航天员。
(2)靶标图像及标尺的实验数据表明:对照方案优于实验方案,其中,靶标十字架的长度不宜过长,以便在近距离能够辨识十字架和底盘刻度线;靶标底盘刻度线与底盘边缘应保留一定的空隙,方便受试者尽早的辨识靶标;标尺在不同视场下应有明显区分,标尺刻度线应能辅助受试者对轴向距离判读。根据对各个要素的分析,提出了较优的靶标图像和标尺设计方案,如图4所示。
(3)图形化信息显示形式的实验数据表明:图形化信息显示方式能够显著提高受试者的判读速度和操作精度,其中组合式的设计方案优于分离式。根据图形化信息显示方案中象形物、标尺和提示框等显示要素的分析,设计提出了较优的图形页面设计方案,如图5所示。
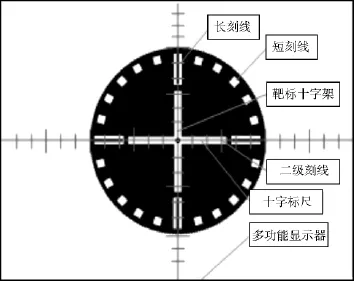
图4 靶标底盘及标尺设计方案
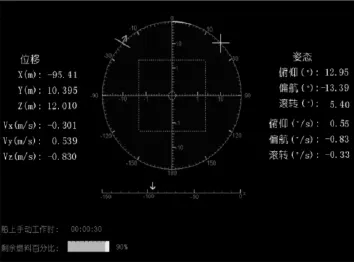
图5 图形显示页面设计方案
5.2 控制系统的研究结果
通过对控制手柄极性、系统控制延迟、系统控制增益等实验研究,得出了以下的主要研究结果:
(1)手控极性实验的数据表明,不同手柄极性的操作绩效有显著差异,其中,平移手柄与飞船运动方向一致,而姿态手柄与飞船运动方向相反,该极性基于杠杆原理,比较符合人的认知和操作控制习惯,绩效最好。
(2)控制系统延时实验的数据表明,控制延时2s与1s和0s相比,成功率和操作绩效呈显著下降,受试者的主观感受也表明2s的控制延时不可控。
(3)姿态控制最大角速度实验的数据表明,在姿态采用速度控制的方式下,姿态控制最大角速度对航天员手控交会对接有影响。在0.3°/s-0.6°/s的姿态控制最大角速度范围内,随着姿态控制最大角速度的增大,成功率和操作绩效呈上升趋势。0.3°/s与0.5°/s、0.6°/s相比绩效有显著差异,但 0.5°/s和 0.6°/s间绩效无显著性差异。
(4)自控转手控初始条件的实验数据表明,随着两航天器轴向距离的减小和初始速度的增大,受试者的操控绩效呈显著性下降。因此,工程设计中,应尽量在两航天器轴向距离较远、相对速度较小并保证目标航天器在可视范围的情况下实施自控转手控。
5.3 评价指标和评价方法的研究结果
通过手控交会对接综合绩效指标理论研究和对手控交会对接实验的数据挖掘,得到了以下的主要研究结果:
(1)实验数据表明,手控交会对接的绩效指标有明显的阶段性特征,依据此特征可将整个手控交会对接过程划分为远距离的追踪控制段(100m~20m)、近距离的精确控制段(20m~0m)和对接时刻(0m),三阶段内的绩效指标的敏感程度不同,例如受试者在远距离的情况下主要以通过帆板控制滚转偏差为主,因此,滚动偏差指标在追踪控制段敏感,在精确控制段不敏感;
(2)依据手控交会对接的三阶段,建立了绩效指标系统,包含三个层面的指标:交会对接过程控制指标、对接结果指标对和时刻精度指标,分别反映了交会对接过程以及结果的优劣程度;
(3)通过对实验数据的分析,对接过程的指标具有一定的相关性,根据该相关性利用因子分析的方法来对指标赋权重;对接精度指标中,指标与各自由度控制的难易程度具有一定的对应关系,根据数据中指标反映的差异程度,采用了熵值法来赋权重。该模型利用客观指标的规律和特性来赋权重,克服了传统专家打分评价方法的主观性和不稳定性,验证实验数据也表明,该评价方法能够可靠、有效的对手控交会对接任务显示-控制系统的操作综合绩效进行评估。
6 总结
手控交会对接是交会对接技术的重要组成部分,是典型的有人参与的人控回路系统,该系统中显示界面和控制系统的优劣决定了整个手控交会对接任务的成败。借助半物理的仿真实验平台,针对手控交会对接过程中与人相关因素,通过大量的实验研究得出了一定的研究结果,为手控交会对接显示-控制系统的工程设计提供了参考,为手控交会对接的工效学的要求和评价提供了数据支撑和方法。
[1]Wigbert Fehse.Automated Rendezvous and Docking of Spacecraft.Cambridge University Press,UK,2003.
[2]Philip N.K.,Ananthasayanam M.R..Relative position and attitude estimation and control schemes for final phase of an autonomous docking mission of spacecraft.Acta Astronautica 2003(52):511-522.
[3]Masliah M.R.,Milgram P..Measuring in a six Degree-of-Freedom Docking Experiment,Ergonomics in Teleportation and Control Lab,University of Toronto,2000.
[4]林来兴.空间交会对接技术.北京:国防工业出版社,1995.9.
[5]中国人民解放军总装备部军事训练教材工作委员会,航天工效学,北京:国防工业出版社,2003.1.