遥操作交会对接技术综述
2011-09-21唐国金周剑勇蒋自成
唐国金 周剑勇 张 波 蒋自成
(国防科学技术大学航天与材料工程学院)
1 引言
空间站作为特殊的航天器,给人类提供了在太空环境下进行长期有人参与科学研究的环境和平台,其无论在对地观测方面、天文观测、生命科学研究,还是在材料科学研究方面,都具有特殊的作用。从前苏联1971年成功发射第一座空间站“礼炮号”至今,空间站的研制和发射已经历过近四十年的历程[1]。这期间,俄罗斯/苏联相继发射了“礼炮”系列空间站和“和平”号空间站,实现了空间站的载人长期居住。当前,在美国、俄罗斯等航天大国的共同参与下,国际空间站(International Space Station,ISS)这个有史以来最大的航天器正在逐步的构建和不断完善。我国的载人航天事业在成功实现神舟六号多人多天飞行,及神舟七号航天员出舱活动后,紧接着将进行空间交会对接试验,我国也即将在载人航天领域迈出新的步伐[2]。
2 交会对接概述
2.1 交会对接技术简介
交会对接(Rendezvous and Docking,RVD)技术是指两个航天器于同一时间在同一轨道位置会和,并在结构上连成一个整体的技术,是载人航天三项基本技术之一[3]。
交会对接,传统上分为自动交会对接和航天员手动交会对接两类。前者对应的交会对接过程由追踪航天器上的控制系统自动控制完成,航天员及地面控制人员对交会对接过程进行状态监视。自动交会对接方式是当前空间交会对接活动所采用的主要方式,如俄罗斯“联盟”号系列载人飞船与ISS的交会对接。后者是指由位于载人航天器上的航天员通过飞船上的手动交会对接系统,手动控制追踪航天器完成交会对接任务。
综合两类交会对接方式,手动方式需要航天员的参与,只适用于载人航天器,既可作为主要的交会对接方式,也可作为自动方式的备份。自动方式因为不需要人的参与,可广泛应用于各类载人、不载人航天器的交会对接,如无人货运飞船等。然而,由于无人航天器的交会对接没有手动方式作为备份,当自动交互对接系统出现故障时,将不得不取消交会对接任务,造成巨大的经济损失,甚至个别情况下会危及空间站等作为对接目标的航天器安全。
ISS每年都要进行多次交会对接,用于乘员轮换及后勤补给等。ISS“远征”10号任务至“远征”24号任务(2004.10~2010.10)共15次远征任务期间的交会对接情况统计见下表[4][5]。
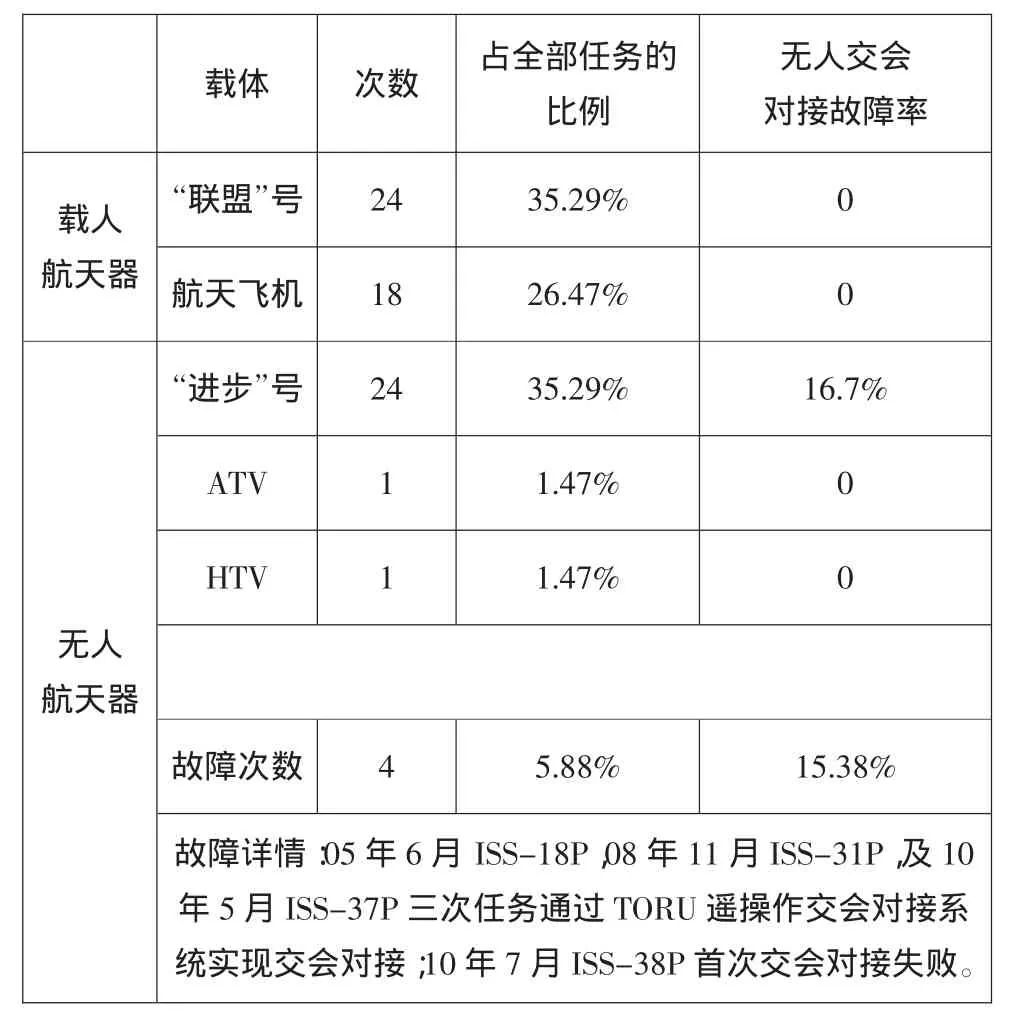
表1 国际空间站交会对接近况
无人航天器的自动交会对接系统的故障比率如下图所示。
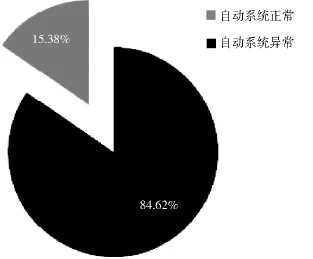
图1 国际空间站无人航天器交会对接
ISS 15次远征任务期间的交会对接情况的分析数据显示,当前航天器上的自动交会对接系统并不是十分完善,发生故障的可能性时刻存在,并且故障率还保持在一个较高的水平。因此,我们有理由认为:自动交会对接系统至少现阶段还不是足够的完善和可靠,需要采用其他交会对接方式作为自动交会对接系统的备份。
针对空间站实验舱、货运飞船等无人航天器与空间站的交会对接,由于无法采用手动方式作为自动交会对接系统的备份,需要寻求其他的备份解决方式。遥操作交会对接以其特殊的交会对接操作和控制实现方式,可以作为无人航天器自动交会对接系统的有效备份手段。
2.2 遥操作交会对接概念
遥操作交会对接是指操作人员在远端(或不在控制航天器环境内)通过遥操作方式操作追踪航天器,实现交会对接。就概念本身而言,遥操作交会对接借鉴了空间机器人遥操作的概念,是传统遥操作概念的一个延伸,是遥科学的一个子领域[6]。
国内外有相关学者和研究人员曾提出过“遥操作航天器”的概念,并提出了遥操作航天器的总体设计思路等[7][8][9]。遥操作航天器指可以通过地面操作人员或空间站上航天员进行遥操作控制的一类航天器,用于完成交会对接、在轨捕获等。
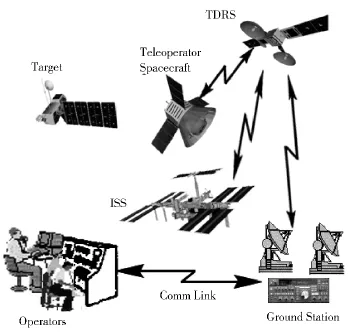
图2 遥操作航天器示意图
遥操作航天器任务实施过程中采用的空间交会对接技术就是遥操作交会对接技术,文献重点阐述了遥操作航天器的概念和基本设计思想,对遥操作交会对接技术没有进行详细的研究和论述。
遥操作交会对接主要有两种工作模式,目标航天器上的航天员对追踪航天器进行交会对接遥操作控制的工作模式,和地面操作人员对追踪航天器进行交会对接遥操作控制的工作模式。操作员利用反馈的TV摄像机图像及相对运动位置、速度等信息,通过遥操作平台在线实时控制远端的追踪航天器完成交会对接。
遥操作交会对接不仅可以作为自动交会对接方式的备份手段,解决无人航天器自动交会对接系统面临的故障和安全性问题。甚至,遥操作交会对接方式与手动控制交会对接方式一样,能提高交会对接的成功率,减少燃料消耗等,用于空间站建造和运营过程中的相关交会对接任务。
此外,通过融入人的判断与决策能力等智能因素,遥操作交会对接技术还可应用于空间非合作目标间的交会和对接,如非合作目标的近距离绕飞、在轨捕获等,具有更广泛应用的重要意义。
美国、俄罗斯/苏联两个航天大国由于决策的不同,交会对接方式的选择也不尽相同,美国主要采用手动方式,俄罗斯主要采用自动方式,由此导致其对遥操作交会对接技术的研究程度也不尽相同。美国曾于上世纪80年代OMV项目中开展过相关技术的基础研究[18],苏联则研制成功用于空间站交会对接任务的遥操作交会对接系统。俄罗斯的TORU遥操作交会对接系统已成功应用于和平号(Mir)空间站和国际空间站的交会对接任务,特别是无人货运飞船与空间站的交会对接,已成功解决多次无人航天器自动交会对接系统故障下的交会对接问题(详情见表 1)。

图3 ISS航天员进行TORU系统操作训练
其他主要的航天研究机构和组织如ESA(European Space Agency)和 NASDA(National Space Development Agency of Japan),也认为遥操作交会对接技术是空间站无人来访航天器交会对接的必要技术之一,分别在ATV[25][26]预研项目和OSV[27]计划中进行了研究。
3 遥操作交会对接关键技术
遥操作交会对接是遥操作技术与空间交会对接技术的结合,既涉及到遥现场、遥操作等遥科学领域的相关技术,又涵盖了航天器动力学与控制领域的相关技术。
3.1 遥操作交会对接控制技术
控制技术是遥操作交会对接技术的核心技术,包括轨道运动(平移运动)控制和姿态运动控制两部分。通常情况下,遥操作交会对接主要对平移运动进行遥操作控制,姿态的控制通过自动控制方式进行。某些特殊情况或进行遥操作交会对接实验时,可通过遥操作方式对平移运动和姿态运动同时进行控制。
与手动交会对接方式相比,遥操作方式,特别是进行地面遥操作交会对接任务时,最大的差别是反馈信息及遥操作控制指令需要通过通信系统进行传输,因而具有通信时延,并且存在通信链路异常,甚至中断的可能。通信时延会造成遥操作控制系统不稳定[10],而通信异常则会引发交会对接的安全性问题。
国内外学者就时延导致的控制不稳定性问题进行了长期深入的研究,从学者Ferrell[11]首次提出这个研究命题到今天已经历时四十多年,综合其主要的解决方法,有以下几类[12][13][15][16]:
(1)“运动—等待—运动”的操作策略
采用“运动—等待—运动”的操作策略,每进行一步操作后,停止操作,等待操作指令执行后的状态反馈,根据该反馈再进行下一步的操作。因此该操作策略是一种断续的操作方式,操作效率很低,相对于其他有改善时延方法的连续操作方式而言,完成任务所需的操作时间会长许多,特别是完成精细遥操作任务时。
国外的学者曾做过相关的操作实验,在时延条件下放置一个物体到一个容器的简单遥操作实验,对比分析使用预测仿真方式和无预测仿真方法的遥操作实验结果,分析其任务的完成时间,分析结果见图4[11]。
(2)双边控制方法
双边控制是指本地操作端和远端执行端处于同一个闭环控制回路,两者之间直接相互作用,通过设计控制算法克服通信时延的影响。双边控制方法通常需要远端的执行力或力矩反馈,因此主要应用于机器人接触作业的遥操作控制。
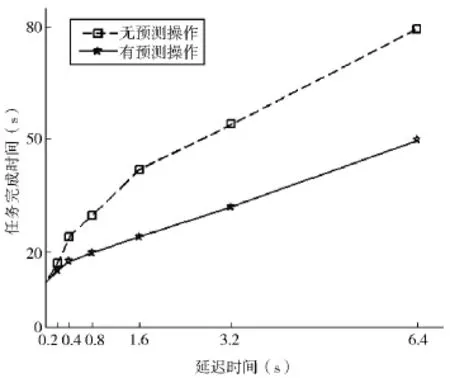
图4 任务完成时间对比
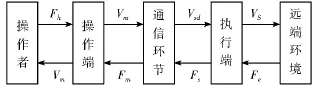
图5 双边控制示意图
双边控制方法包括:基于无源性理论的双边控制方法,如Anderson方法、波变量方法等;基于离散事件的控制方法;基于Lyapunov函数的方法;基于滑模思想的控制方法;自适应速度/力控制方法;基于H—理论的控制方法等。
(3)预测控制方法
预测控制方法的基本思想是建立远端执行系统和环境的数学模型,包括动力学与运动学模型,环境相互作用模型等,通过建立的模型进行远端执行器运动状态的仿真预测,在预测运动状态的基础上进行控制。
主要的控制方法有:基于预测控制理论的控制算法实现方式,如蚁群优化预测控制算法、神经网络预测控制方法、模糊预测控制、预测函数控制等;基于预显示的控制方法,通过建立的操作对象和环境的仿真模型,对系统的运行状态进行仿真预测,并将预测结果用于驱动显示图形,操作者面对预测显示的虚拟环境进行操作,虚拟环境实时响应操作者的操作指令。
基于预显示的控制方法被认为是解决具有明显时延(时延大于0.5s)遥操作时最理想、操作效率最高的遥操作控制方法。为了提高操作人员遥操作时的沉浸感,基于预显示的控制方式可拓展应用虚拟现实技术进行图形的显示和交互。基于虚拟现实的预显示方式是当前遥操作领域解决时延问题的研究热点[19][20]。
基于预显示的控制方法涉及的关键技术主要有远端操作环境的建模和预估、预显示误差校正、人机交互界面设计、信息融合、增强现实技术、操作安全性检测与预警、高沉浸感环境生成等技术。
1993年德国在哥伦比亚号航天飞机密封实验舱中进行的机器人技术实验(Roboter Technology Experiment,ROTEX)首次在实际应用工程中验证了基于预显示的天地大时延遥操作控制技术,通过地面遥操作空间机器人完成漂浮物的抓取等实验[17]。
(4)遥编程控制方法
遥编程控制方法基于图形的预显示,根据远端操作设备的智能程度,在线生成不同级别的遥操作指令,控制远端目标的运动。在遥编程系统中,利用对操作环境的先验知识构造虚拟环境,操作员面向虚拟环境进行操作,同时获得即时的视觉和运动觉反馈;系统监视操作员的动作,并将操作员的动作转化为符号命令程序,发送给远端遥操作目标执行;遥操作目标接受命令,半自主地连续执行,并不断向操作员报告执行状态。
遥编程控制方法和预显示方法有共同之处,如本地虚拟环境的建模、显示等。在应用过程中,遥编程控制方法也往往与预显示方法相结合,通过两类方法的综合应用,更好的解决遥操作时延问题。
上面提到的几类遥操作时延解决方法是针对空间遥操作机器人和行星表面着陆器等的遥操作而设计和研究的,与遥操作交会对接任务的应用对象有所差异,但其基本的解决思想和方法是可用的,适用于遥操作交会对接任务。
遥操作交会对接控制技术需要分析遥操作交会对接控制过程和控制逻辑的特性,研究遥操作基础技术与交会对接技术的综合应用,研究适用于遥操作交会对接的控制技术。
3.2 遥操作交会对接安全技术
遥操作交会对接安全技术包括传统交会对接过程中存在的共同性安全技术,及遥操作交会对接特性所带来的特殊安全问题的解决方法。
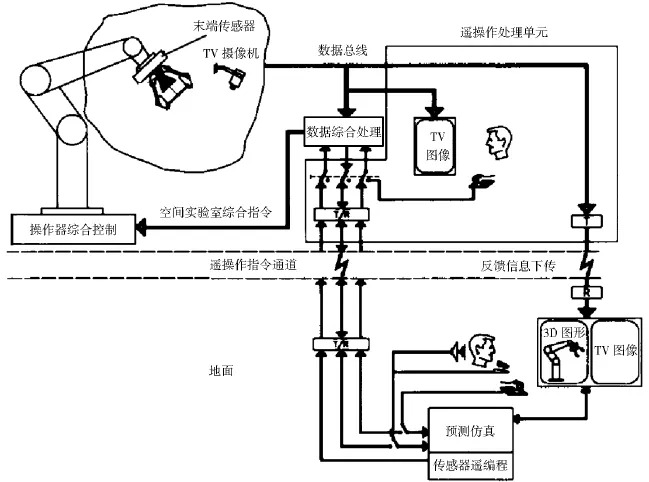
图6 ROTEX控制结构图
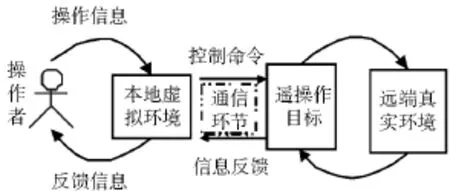
图7 遥编程控制示意图
传统交会对接过程中存在的安全性问题主要包括非正常的碰撞问题、交会对接过程的各类故障问题。对这类安全技术国内外学者进行了比较广泛的研究,提出了基于碰撞概率的碰撞预警方法、安全轨迹设计[22]、最优避撞机动设计[23]、故障模式(发动机故障模式)下防撞设计[24]等交会对接安全技术研究成果。
这些研究成果有助于解决自动交会对接过程中的共性安全问题,也是遥操作交会对接需要的解决重要技术,但遥操作交会对接需要研究的不仅仅就这些安全技术。
由于遥操作交会对接存在通信时延,特别是进行天地遥操作交会对接时,时延可达5s~7s[11]。操作时延除了引起上述控制稳定性等控制问题之外,也会引起遥操作交会对接的安全性问题,主要表现为两个方面。
(1)通信链路异常的潜在安全威胁
在遥操作交会对接过程中,反馈信息和遥操作控制指令均需通过通信链路进行传输,数据传输过程存在链路异常或链路设备故障等可能性(ISS-38P任务首次交会对接中自动系统故障后,使用TORU系统时出现了通信链路中断情况,导致首次交会对接任务失败[4])。如果出现无法正常传输遥操作信息的情况,则追踪航天器处于无控状态。此时,不仅无法继续完成遥操作交会对接任务,甚至追踪器有可能威胁到空间站等目标器的安全。
(2)操作时延导致的安全威胁
由于操作时延的存在,操作人员对正在实施交会对接任务的追踪器真实状态的感知存在明显的时间滞后。并且当操作人员发现异常需要进行干预操作时,其操作所生成的控制指令也要经过一个时间延迟之后才能到达追踪器。而遥操作交会对接的应用环境恰恰又是两航天器相距很近(一般为200m~0m)的交会对接平移靠拢段,因此操作时延引起的操作安全性问题不能忽视。
遥操作交会对接安全技术在借鉴和采用传统交会对接安全技术的基础上,还需要深入分析遥操作交会对接安全的特性及其与传统遥操作交会对接安全的异同。进而研究相应的应急处理技术和应急操作策略、遥操作交会对接过程的状态感知和监视技术等相关的遥操作交会对接安全技术。
1997年6月25日,“进步”M-34号货运飞船使用TORU系统进行遥操作交会对接实验时,就发生了与“和平”号空间站的碰撞事件。造成“光谱”号舱太阳电池阵的损坏和舱压的严重泄露,最终撞击事故被定义为5级(共分1~7级,7级表示严重事故,航天员必须立即撤离空间站)[28]。
ATV自动交会对接过程中,航天员和地面中心也需要监视其运动状态。发现异常时,由航天员根据监视情况(或地面监视中心的指令)进行应急处理操作,ATV转入撤离、任务放弃等安全模式。ATV的空间站监视和应急操作通过俄罗斯的TORU系统进行。
3.3 遥操作交会对接演示验证技术
演示验证技术主要用于构建地面演示验证系统,对遥操作交会对接技术的各项关键技术和整个遥操作交会对接过程进行演示验证,验证各项技术的可行性、可靠性等各项性能指标。涉及的主要技术包括半实物仿真技术、虚拟现实技术、空间环境和平台模拟技术等。
采用虚拟现实技术可以增加操作人员的沉浸感,更加真实的模拟空间操作环境;基于半实物的仿真技术可以综合验证遥操作交会对接控制技术等关键技术。
ESA在ATV预研项目(ATV pre-development program,ARP)中研究了地面操作员支持系统(Ground Operator Assistant System,GOAS)和ATV空间站遥控控制系统(Remote ATV Control System on ISS,RACSI)用于支持ATV与空间站的交会对接任务,应对自动交会对接系统异常情况。并建立了大型地面仿真系统(Rendezvous Ground Simulator,RVGS),进行 ATV交会对接任务和关键技术的演示验证。
日本于1994年在筑波(Tsukuba)空间中心建成了先进的交会对接试验系统:交会对接操作测试系统 (rendezvous and docking operation test system,RDOTS),用于交会对接过程的演示试验。
4 结论
遥操作交会对接技术属于遥科学与航天器动力学与控制学科的交叉领域,是一项可广泛应用于未来我国空间站任务、深空探测任务及国防航天领域的空间技术。本文通过分析国际空间站近几年来交会对接任务的情况,引入遥操作交会对接的概念,对遥操作交会对接关键技术进行了详细的分析和归纳。
通过分析和探讨,作者认为:
(1)空间站无人航天器的交会对接需要采用遥操作交会对接方式作为自动方式的备份。
(2)遥操作交会对接技术可广泛应用于军民各领域的合作目标和非合作目标间空间交会对接等空间操作任务中,未来具有广阔的应用前景。
(3)遥操作交会对接不是简单的将手控模式下的操作端改在空间站或地面上,其过程涉及到一系列的新问题、新技术,我们应对这些技术开展深入的研究,将这些技术应用于工程实践中。 ◇
[1]何绍改.空间站发展的历史轨迹[J].国防科技工业,2008(8):69-72.
[2]孙自法.中国载人空间站正立项审批[J].中国航天,2009(10).
[3]唐国金,罗亚中,张进.空间交会对接任务规划[M].科学出版社,2008.
[4]www.nasa.gov
[5]www.en.wikipedia.org
[6]屠善澄,黄志澄.载人航天发展展望[M].国防工业出版社,1997.
[7] J.Robert Tewell,Richard A.Spencer.Advanced Teleoperator Spacecraft.AIAA.
[8]J.R.Turner,et al.Teleoperator Maneuvering System.AIAA,1982.
[9]Jian-yong Zhou,et al.Conceive of the Conception and Investigation of Teleoperator Spacecraft[J].61st International Astronautical Congress,2010.
[10]Noriaki Ando,Joo-Ho Lee,et al.A Study on Influence of Time Delay in Teleoperation[J].IEEE,1999.
[11]Thomas B.Sheridan,Space Teleoperation Through Time Delay:Review and Prognosis[J].Transaction on Robotics and Automation,1993.
[12]景兴建等.遥操作机器人系统时延控制方法综述[J].自动化学报,2004,30(2):214-223.
[13]李焱.大时延遥操作技术及虚拟现实技术研究[D].国防科技大学,2002.
[14]邓启文.空间机器人遥操作双边控制技术研究[D].国防科技大学,2006.
[15]Miguel Hernando,Ernesto Gambao.A Robot Teleprogramming Architecture[J].IEEE,2003.
[16]Yuichi Tsumaki,et al.Predictive Motion Display for Acceleration Based Teleoperation[J].IEEE,2006.
[17]G.Hirzinger,et al.ROTEX-The First Remotely Controlled Robot in Space[J].IEEE,1994.
[18]Keith E.Cok.OMV Mission Simulator.AIAA,1990
[19]赵猛,张珩,陈靖波.灵境遥操作技术及其发展[J].系统仿真学报,2007,19(14).
[20]李华忠,梁永生,洪炳荣.基于虚拟现实的无时延感空间机器人遥操作技术研究[J].计算机应用研究,2008,25(11).
[21]朱仁章 等.空间交会最终平移轨迹安全模式设计[J].宇航学报,2004,25(4).
[22]Louis Breger,Jonathan P.How.Safe Trajectories for Autonomous Rendezvous of Spacecraft[J].AIAA,2007.
[23]王华等.基于碰撞概率的交会对接最优碰撞规避机动[J].宇航学报,2008,29(1).
[24]卢山,徐世杰.故障模式下的空间交会防撞设计[J].空间控制技术与应用,2008,34(6).
[25]M.Cislaghi.The ATV Rendezvous Pre-development Program(ARP)[A].Proceedings of the 22nd AAS Guidance Control Conference,1999.
[26]Guillermo Ortega,Luis J.Alvarez.GOAS:a cybertool for spacecraft rendezvous[J].IEEE,1998.
[27]Yasufuni Wakabayashi,et al.Guidance,Navigation,and Control Strategy in a Proximity Range for Autonomous RVD Miss[J].NASDA,Japan,1991.
[28]周晓飞等译.联盟号飞船[M].北京:中国宇航出版社,2006.