平面场景和建筑物成像的几何分析
2011-11-06曲宏松李桂菊王延杰
张 叶,曲宏松,李桂菊,王延杰
(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033; 2.中国科学院航空光学成像与测量重点实验室,吉林长春130033)
1 引言
相机的不同运动方式对场景成像会产生不同的效果,尤其是空对地飞行器的自主导航,其投影透视效果非常明显,3个参数的刚性变换模型不足以表示两幅图像间的变化,需要建立更多参数的模型。
当所拍摄的场景中的物体都在一个平面上,且场景中的物体均静止,或实际拍摄过程中,相机镜头到场景中的物体的距离远远大于物体高度的时候,可以近似地把场景看成一个平面。在理论上,Semple J G等人于1993年指出在以下两种情况下两幅平面图像之间的对应关系可以由一个8参数的单应性(即投影变换矩阵)表示:(1)静止3D场景是指场景中的物体都静止,且可以在3D空间任意分布,摄像机镜头绕光心旋转拍摄,即可以进行水平扫动、垂直扫动、旋转及镜头缩放等动作,但不可以平移,实际拍摄过程中可以把条件适当放宽到摄像机近似地在一个固定点拍摄,此时模型可以用8参数模型表示。(2)平面场景是指场景中的物体都静止,且场景中的物体在一个平面上,实际拍摄过程中,当摄像机的镜头到场景中的物体距离远远大于物体高度的时候,可以近似地把场景看成一个平面。摄像机镜头可以进行平移、水平扫动、垂直扫动、旋转及镜头缩放等动作,运动不受限制,比如遥感图像、航拍图片等均可以看作是平面场景图像,都可以用8参数模型来表示其变化。
基于上述理论,本文针对采集图像中平面场景以及建筑物的识别,利用摄像机参数,对实际的建筑物形状参数与采集图像中建筑物成像的像素数进行关联,对平面场景及建筑物成像过程进行了几何分析,结果表明:已知相机参数及飞行状态的情况下,可以通过对平面场景及建筑物形状信息的推导,来完成对目标的识别与跟踪。
2 平面场景成像分析
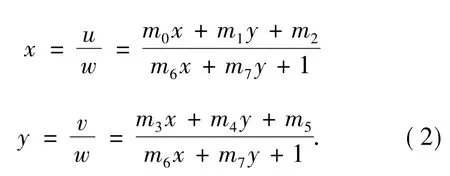
在摄相机进行图像采集的过程中,需要将客观世界的3D场景投影到相机的2D平面上,相机的不同运动方式对场景成像会产生不同的效果,这种投影关系可以用图像间的变换进行描述。图像间的变换可以应用多参数等模型来表示。如近似地把场景看成一个平面时,摄像机可以进行任何方式的运动,而平面场景投影到2D平面上,可以用一个透视投影矩阵来表示这种变换,如式(1)所示:
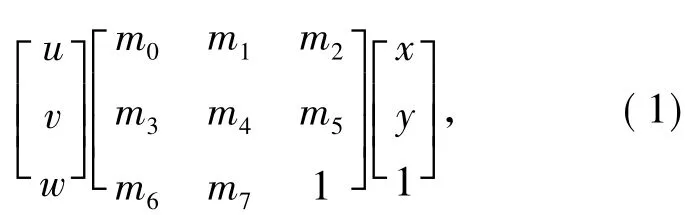
即:
透视投影变换参数取决于一些相机内部参数,影响透视梯形变换的主要参数有:相机的焦距、相机的倾角、CCD靶面大小、采集到的图像大小,以及相机的偏航角和侧滚角。
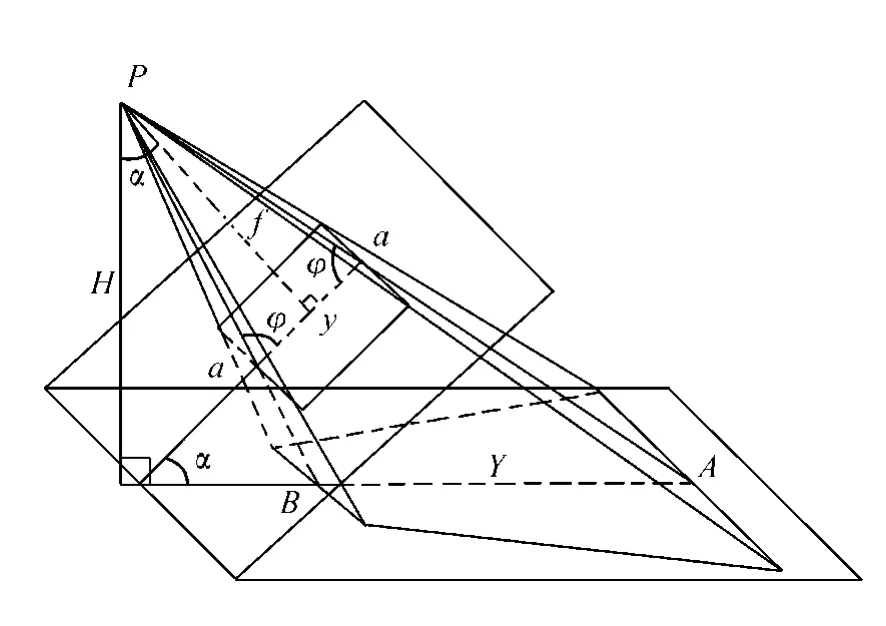
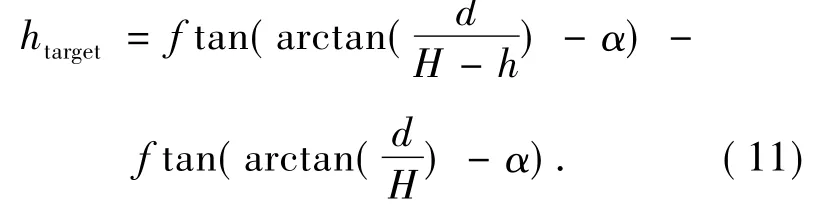
图1 侧滚角为0°时摄像机靶面与采集图像之间的投影关系Fig.1 Perspective relationship between target surface and collected image in roll angle of 0°
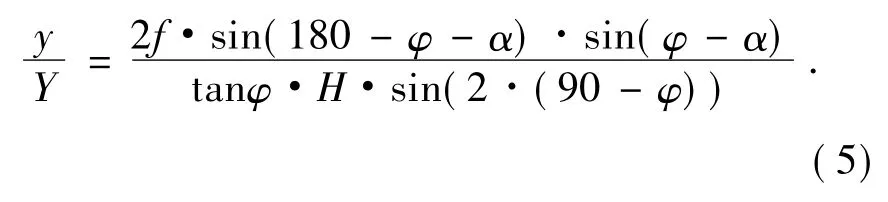
当飞行器平稳飞行时,设相机侧滚角为0°,根据相机的偏航角调整图像,使得相机轴线垂直于成像平面与景象平面的交线,如图1所示,图中摄像机靶面与景象平面夹角为α。成像平面为矩形,将相机靶面翻折到焦点下方作图,设CCD的靶面长为a,高为y,它所投影到地面上的梯形长边为A,短边为B,高度为Y,焦距为f,镜头距离地面长度为H,由三角形的比例关系可得:
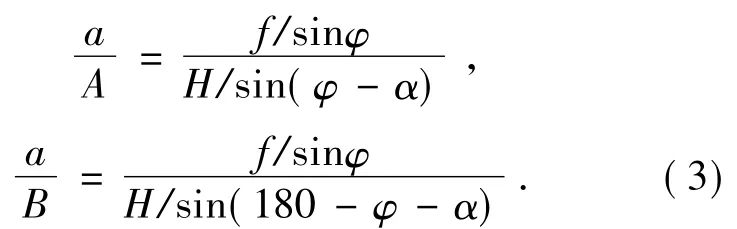
由正弦定理得:
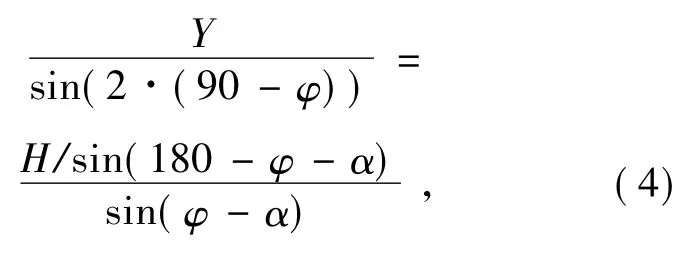
则:
采集的图像对实际图像进行梯形变换的同时对图像内容进行拉伸,近处的物体较大,而远处的物体较小,属于线性调频现象,即拉伸的比例是线性变化的而不是固定的。根据靶面图像与实际图像间的几何对应关系,即可求出8参数变换矩阵。
3 建筑物参数计算
建筑物属于一类特殊目标,具有长、宽、高三维特征,采用传统的根据地图模板进行匹配的方法很难捕捉到,原因如下:
(a)建筑物在不同角度特征是不一样的,俯视的卫星拍摄图片,只能得到长、宽两个参数的特征,信息条件是不完备的,因此根据卫星拍摄的图片无法进行可靠的建筑物识别;
(b)如果建筑物不是孤立目标,易发生误匹配或错匹配的情况,需要对建筑物进行识别、区分;
(c)由于光线方向和亮度的影响,建筑物的灰度信息并不可靠,而且建筑物的影子属于不确定因素,会对建筑物的捕获产生一定的负面影响;
(d)当不断接近建筑物目标时,三维建筑物的特征变化比二维情况要复杂得多,不但灰度信息会更加丰富,而且形状还会有所改变。
在这种情况下,如果已知建筑物形状参数,则可以对建筑物成像进行分析,从而得到建筑物成像后在像面上的参数特征。
3.1 建筑物成像高度近似计算
首先分析建筑物成像在靶面中心线上的情况,成像原理如图2所示。
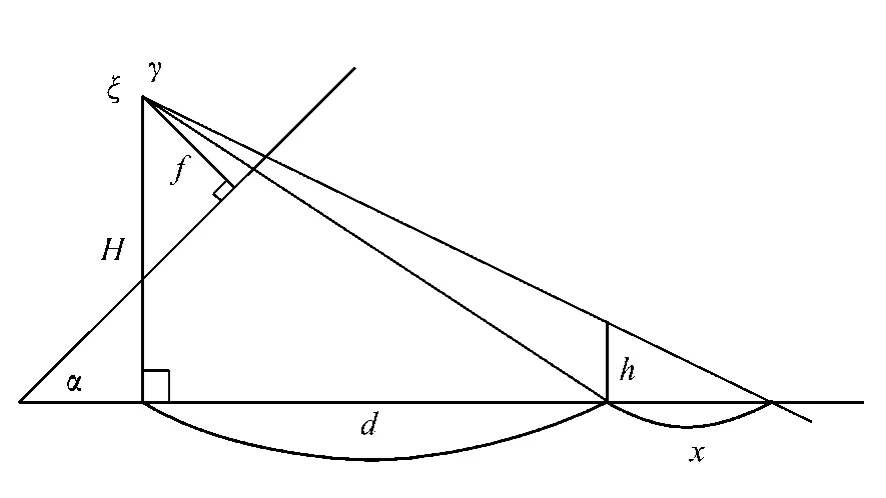
图2 建筑物高度成像Fig.2 Building height imaging
图中h为建筑物的高度,下面求解建筑物在靶面上所呈的像素数:
图中顶角由α+ζ+τ组成,则:

且:
可得:

设建筑物高度在靶面上成像长度为htarget,则:
即:

由此得出建筑物高度在靶面上的成像像素数,而不在靶面中心轴线成像的建筑物图像也近似为这个结果。
3.2 建筑成像宽度近似计算
考虑建筑物成像靶面中心对称的情况,成像原理如图3所示。
由图可得成像在靶面上边和下边的实际景物
图3 建筑物宽度成像Fig.3 Building width imaging
长度与成像在靶面上的建筑物宽度之间的关系:

当已知建筑物实际宽度W的时候,由式(12)可以近似得到建筑物成像在靶面上的像素数范围,以此为依据可以识别建筑物。
4 建筑物成像轮廓识别
建筑物的轮廓是建筑物的重要特征,当求解出建筑物高度和宽度参数后,需要对图像内的建筑物进行轮廓识别,采用水平条形滤波器和垂直条形滤波器对图像滤波,寻找建筑物的位置。水平条形滤波器由3个方向性的高斯滤波器的加权和组成,高斯滤波器如式(15)所示:

水平方向的高斯滤波器权值是-1,2,1,x方向的sigma为2,y方向的sigma为1,彼此之间有一个像素的偏移,垂直条形滤波器是水平条形滤波器旋转90°后的结果,如图4所示。

图4 水平和垂直条形滤波器Fig.4 Horizontal and vertical bar filters
对图像进行滤波后,建筑物的水平轮廓和垂直轮廓可以被提取出来,通过之前的参数计算,可以确定轮廓在一定范围内的区域即为感兴趣目标。图5为经垂直条形滤波后提取垂直轮廓的图像。

图5 经垂直条形滤波后提取垂直轮廓的图像Fig.5 Extraction image with vertical contour by vertical bar filter
5 实验仿真结果
本方法需要预先获得建筑物的长、宽、高参数,根据摄像机俯仰、航向、海拔、距离信息与建筑物之间的关系,即可通过参数计算建筑物在摄像机靶面上的成像特征,这样可以解决上述提及的(a)(b)问题,通过长、宽、高度信息进行建筑物的区分;本算法结合轮廓匹配的方法,将计算得到的三维轮廓对图中的建筑物进行匹配,从而解决上述由光线变化带来的(c)问题;由于参数是根据摄像机参数不断实时更新计算的,当接近建筑物时,模板参数相应调整,因此可以解决问题(d)。与计算出的立体模板做匹配即可进行自动目标捕
6 结论
获与跟踪,仿真试验结果如图6所示。
本文通过几何推导的方法,计算了立体模板的制备参数,在已知摄像机飞行参数和建筑物参数的情况下,推导出在靶面上的成像尺寸,以此为依据对建筑物目标进行识别。由于摄像机飞行参数、建筑物参数的获得以及几何推导计算过程会带来一定误差,所以在求建筑物成像像素数的范围,立体模板匹配时,允许参数误差在10个像素左右。本方法适合在典型建筑物、孤立建筑物、建筑群中具有明显形状特征等情况下,自动捕获与跟踪立体目标。
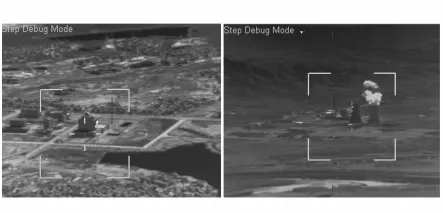
图6 仿真试验结果Fig.6 Simulation experiment results
[1]张毓晋.图像理解与计算机视觉[M].北京:清华大学出版社,2004.ZHANG Y J.Image Understanding and Computer Vision[M].Beijing:Tsinghua University Press,2004.(in Chinese)
[2]CASTLEMAN K R.Digital Image Processing[M].New Jersey:Prentice Hall,2002:375-402.
[3]PETROU M,BOSDOGIANNI P.Image Processing,The Fundamentals[M].Hobok:Wiley Press,2005:62-66.
[4]张叶,曲宏松,王延杰.运用旋转无关特征线实现景象匹配[J].光学 精密工程,2009,17(7):1759-1765.ZHANG Y,QU H S,WANG Y J.Implementation of scene matching based on rotation invariant keylines[J].Opt.Precision Eng.,2009,17(7):1758-1765.(in Chinese)
[5]FORSYTH D A,PONCE J.Computer Vision:A Modern Approach[M].林学言,王宏,等译.北京:电子工业出版社,2004.
[6]LOWE D G.Distinctive image features from scale-invariant keypoints[J].International J.Computer Vision,2004,60(2):91-110.
[7]WANG G H,TSUI H T,HU ZH Y.Structure and motion of nonrigid object under perspective projection[J].Pattern Recogn.Lett.,2007,28(4):507-515.
[8]汪行,陈学,金敏.线段提取在高分辨率遥感图像建筑物识别中的应用[J].计算机辅助设计与图形学学报,2005,17(5):928-934.WANG X,CHEN X,JIN M.Application of line segment extraction to recognize buildings in high-resolution remote sensing images[J].J.Computer Aided Design&Computer Graphics,2005,17(5):928-934.(in Chinese)
[9]陈刚,车仁生,叶东,等.一种基于立体模板的双目视觉传感器现场标定方法[J].光学 精密工程,2004,12(6):626-631.CHEN G,CHE R SH,YE D,et al..Stereo vision sensor field calibration method based on volume template[J].Opt.Precision Eng.,2004,12(6):626-631.(in Chinese)
[10]王继阳,文贡坚,李德仁.直线特征立体匹配中的不确定性问题[J].信号处理,2010,26(5):641-647.WANG J Y,WEN G J,LI D R.Uncertainty in matching straight line segments[J].Signal Processing,2010,26(5):641-647.(in Chinese)
[11]宋晓宇,单新建.高分辨率卫星影像在城市建筑物识别中的初步应用[J].遥感信息,2002(1):27-31.SONG X Y,SHAN X J.Preliminary application of high-resolution satellite image in city building classification[J].Remote Sensing Information,2002(1):27-31.(in Chinese)
[12]徐伟声.基于SPOT影像的城市建筑物的识别应用[J].湖北民族学院学报(自然科学版),2007,25(3):323-325.XU W SH.Recognition of city buildings based on SPOT image[J].J.Hubei Institute for Nationalities(Natural Sci-ence),2007,25(3):323-325.(in Chinese)
[13]周小成,汪小钦,骆剑承,等.结合对象关系特征的高分辨率卫星影像建筑物识别方法[J].国土资源遥感,2008,4:27-31.ZHOU X CH,WANG X Q,LUO J CH,et al..The method for extraction of buildings from high resolution satellite images in association with relevant features of object[J].,2008,4:27-31.(in Chinese)
[14]赵洁,李光耀,庞池海,等.基于小波变换的卫星遥感地图中建筑物识别[J].计算机技术与发展,2008,18(11):243-246.ZHAO J,LI G Y,PANG CH H,et al..Research on building recognition from satellite remote sensing image based on wavelet[J].Computer Technol.Development,2008,18(11):27-31.(in Chinese)
[15]ZHANG Y,WANG Y J.High accuracy real-time automatic thresholding for centroid tracker[J].SPIE,2006,6027:60262P.