采用双天线GPS/INS系统的汽车侧偏角和轮胎侧偏刚度估测法
2011-11-02胡晓清尚修香
胡晓清,尚修香
(1.徐州空军学院军交系,江苏徐州 221000;2.徐州空军学院四站系,江苏徐州 221000)
采用双天线GPS/INS系统的汽车侧偏角和轮胎侧偏刚度估测法
胡晓清1,尚修香2
(1.徐州空军学院军交系,江苏徐州 221000;2.徐州空军学院四站系,江苏徐州 221000)
介绍了测姿原理,分析了采用单天线GPS/INS组合测量方式的运动学卡尔曼滤波器在车辆侧倾和传感器发生漂移时存在的加速度偏差测量的延时问题,提出了直接测量车辆侧倾角和传感器漂移的双天线GPS/INS测量方法,并利用该测量方法对车辆和轮胎的侧偏角以及轮胎的侧偏刚度进行了估测。测试结果表明:采用双天线 GPS方法测量的侧偏角和侧偏刚度估测值与理论值能够较好地吻合,说明由于双天线 GPS/INS系统直接测量车辆的行驶情况,提高了侧偏的估测精度,显示该项技术在未来汽车安全系统的应用中具有突出的优势。
GPS/INS;汽车状态估测;车辆侧偏角;轮胎侧偏刚度;侧倾角
目前的车辆控制系统,例如防抱死制动系统(ABS)、车辆稳定性控制系统等都需要用车辆侧偏角作为逻辑控制的关键参数[1-2]。但若缺少昂贵的测速雷达,侧偏角不易精确获得。为此,成熟系统上一般采用集成惯性传感器来获得侧偏角的估测值[2-4],而惯性传感器易产生漂移并且当出现路堤和车辆侧倾时容易出错[5]。其他的估测车辆侧偏角的方法诸如利用动力学和运动学模型估测,都需要轮胎参数的精确值,而这些参数对控制器来说都是未知的。全球定位系统(GPS)可以确定地球表面任意点的车体位置、速度和姿态,能够有效地对车辆进行导航 。目前较为流行的是采用 GPS和INS组合测量的方式对侧偏角进行测量,它能提供车辆姿态的高更新率无偏差估测。笔者在单天线 GPS/INS测量系统的基础上研究了双天线 GPS/INS系统测量车辆姿态的原理,并在实验车型上进行了验证。
1 系统模型
图1所示的是汽车二自由度动力学模型。其动力学线性微分方程为
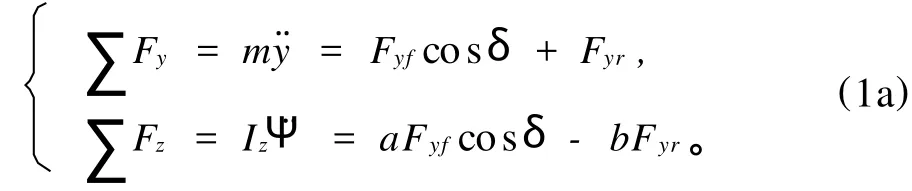
动力学方程也可写成下列形式:
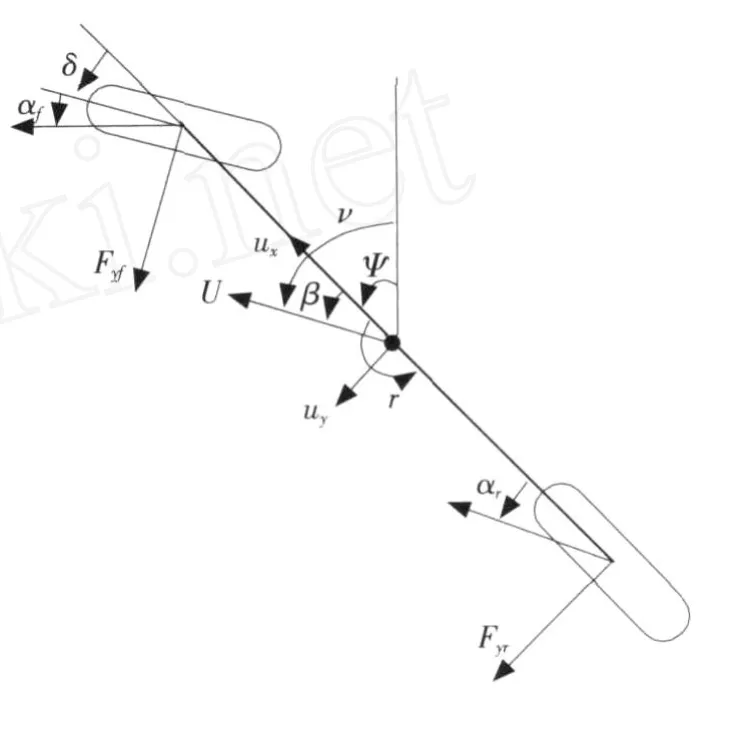
图1 汽车二自由度动力学模型示意图Fig.1 Schematic of the bicyclemodel
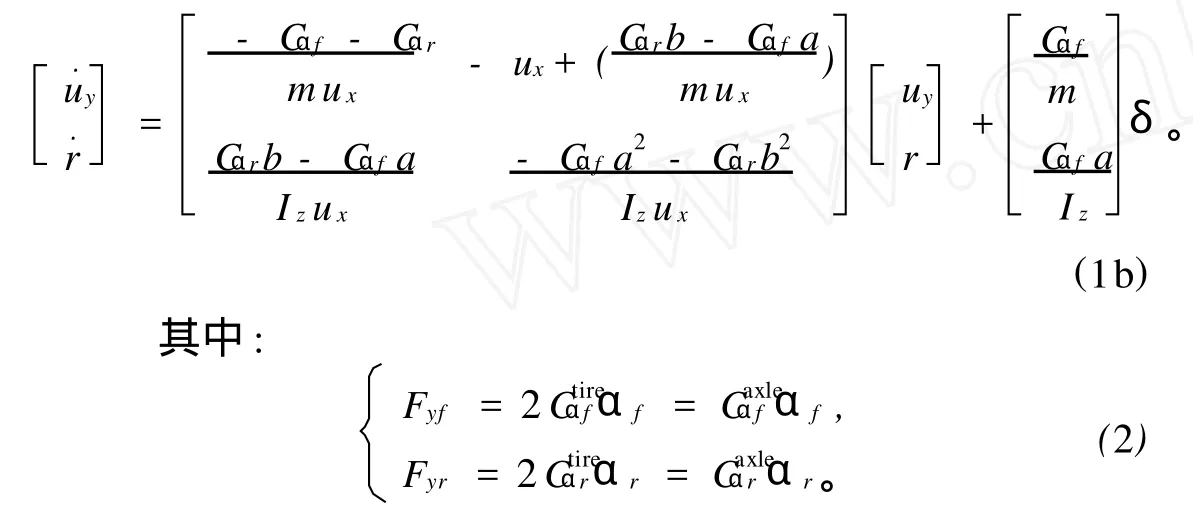
式(1)和式(2)中:a为前轴到车辆重心的距离;b为后轴到车辆重心的距离;Cαf,Cαr为前后轮胎侧偏刚度;m为汽车质量;Iz为汽车的横摆惯性矩;ux为纵向速度;uy为横向速度;r为横摆角速度;δ为转向角;αf,αr分别为前、后轮的侧偏角;Ψ为横摆角。
图2所示的是简单的公路边坡上的汽车侧倾中心坐标模型。地理坐标下的汽车姿态的变化与车架坐标下的角速度之间的关系如下(只考虑横摆和侧倾运动的情况):

式(3)中:uy,frame为车身的横向速度;ux,frame为车架的纵向速度;φr为公路边坡上的车架侧倾角;φν为悬架因素引起的车身侧倾角;Ψ为车架横摆角;ay,m,ay,bias为横向加速度的测量值和偏差;pm,pbias为转速陀螺仪的测量值和偏差;rm,rbias为横摆角速度测量值和偏差;c为加速度计到重心的纵向距离;h为加速度计到侧倾中心的垂直距离;w为传感器噪声。
2 单天线GPS/INS测量法
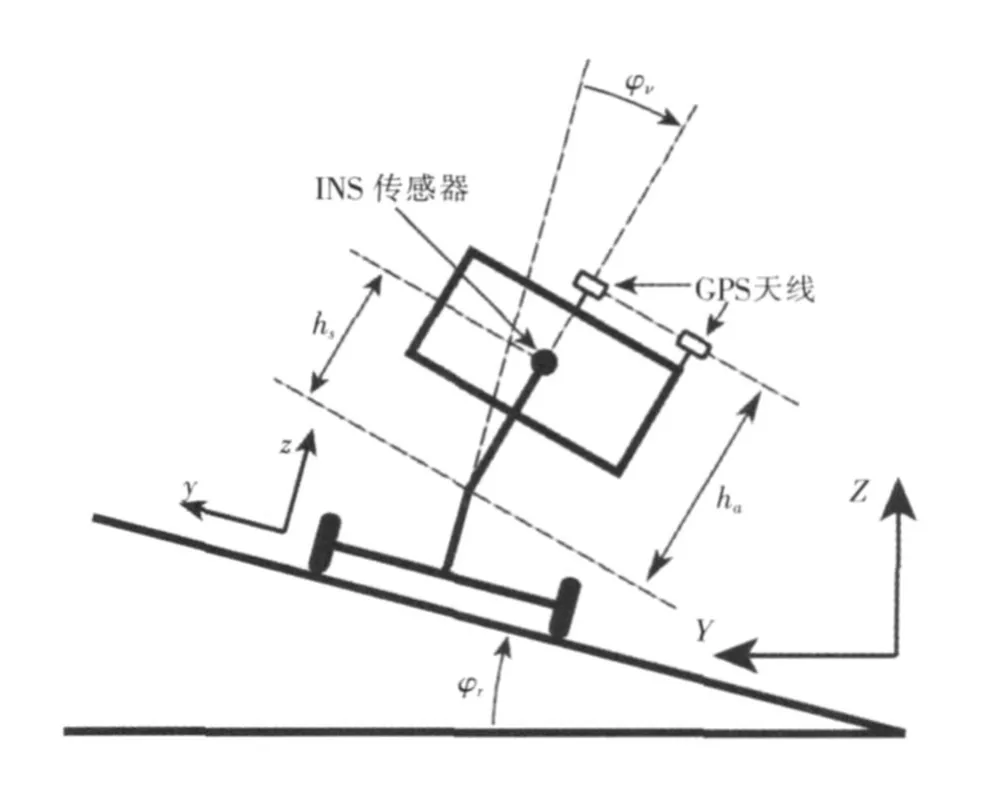
图2 公路边坡上的汽车侧倾中心坐标模型Fig.2 Roll center model w ith road side-slope
GPS/INS系统提供车辆路线或行驶方向,并与横摆陀螺仪测量的横摆量进行比较,进而对车辆的侧偏进行估测,其方程如下:

式(4)中:νGPS为车辆航向角;rgyro为横摆
角速度。单天线 GPS系统中集成有横摆陀螺仪和横向加速度计,用来对侧偏角的估测进行补偿,使测量结果更加精确。但由于存在车辆参数等非线性因素的影响,而图1模型中未考虑这些因素,侧偏角的估测结果误差较大。因此在 GPS/INS测量系统的基础上建立了动力学卡尔曼滤波器,对侧偏角进行精确测量。
加速度计在工作过程中会因为其本身的校准误差、车辆侧倾引起的加速度信号分量和漂移等因素产生测量偏差,而卡尔曼滤波器能估测这些偏差并进行相应处理。
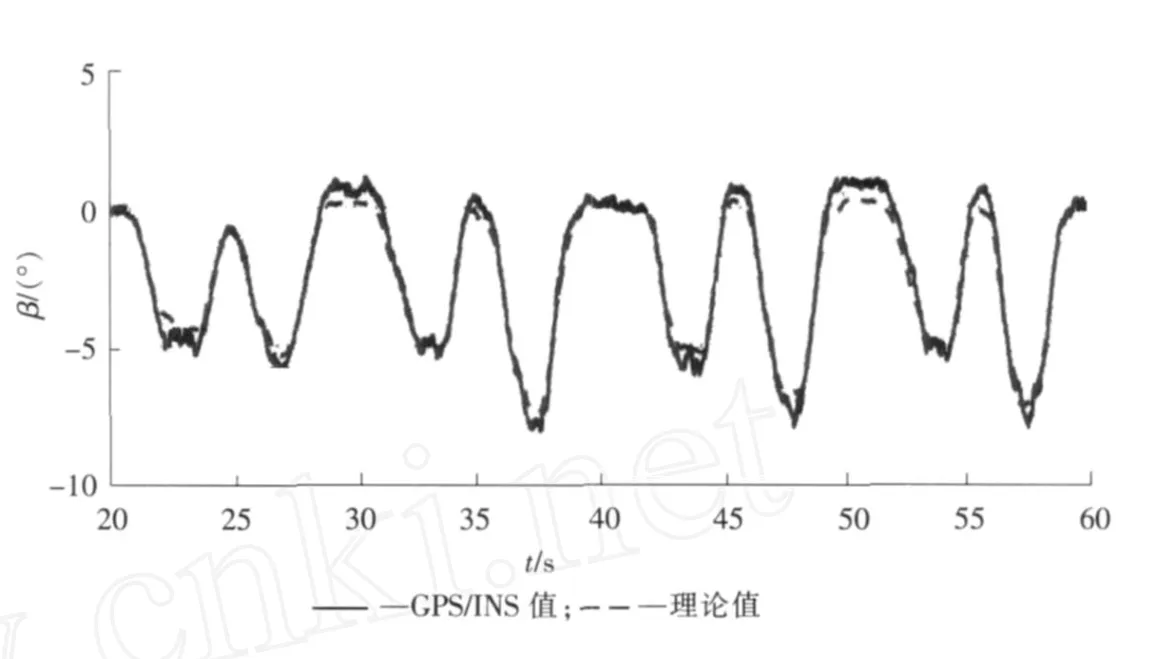
图3 转向时的车辆侧偏角测量值和理论值Fig.3 Measured and model sideslip angle during cornering maneuvers
在实验车上进行转向盘角阶跃机动实验,前轮转角阶跃输入为85°,速度为8 m/s。图3为单天线 GPS/INS集成系统所测的侧偏角和自行车模型计算得出的理论侧偏角的比较。由图3可看出,由 GPS测量精度引起的侧偏值误差大约为0.4°。理论侧偏角和实验值之间的差别主要发生在t=30 s和t=50 s时刻,此时行驶方向上的停车场边坡角度也发生了改变,说明卡尔曼滤波器估测加速度计偏差中存在固有延迟。侧倾角改变使偏差发生变化时,这种延时就更加明显。侧倾速度越大,由延时产生的侧倾估测误差也越大。这就需要直接测量道路边坡和车辆侧倾角,来提高侧偏估测精度。
3 双天线GPS/INS集成系统
为改善单天线GPS/INS侧偏估测的内在局限性,采用双天线GPS接收机来提高道路边坡和车辆侧倾时的侧偏测量精度。在该系统中,双接收机横向放置,能同时直接测量车辆的横摆和侧倾情况(忽略俯仰角)。它采用整体载波相位测量法来确保精确的姿态测量[7]。通过双天线,能消除由于陀螺仪和 GPS/INS同步问题引起的行驶方向上的测量误差。
双天线 GPS接收机在地理坐标系中测量横摆角、侧倾角和速度矢量。

将式(3)和式(5)的传感器测量值进行合并,将车架处的速度转变为天线处的速度,将车辆坐标系转变为地理坐标系。设 GPS主天线置于车辆顶部的中心线上,位于重心的上方(见图2),GPS测量值与车辆状态之间的关系为

式(6)中:uy,antenna为地理坐标系下的GPS天线处的横向速度;Uantenna为天线处的实际速度;ha为侧倾中心与 GPS天线之间的垂直距离;νantenna为天线处的方位角。

当 GPS测姿有效时,有
当 GPS测速有效时,有
4 实验验证
为验证所提理论,在徐州空军学院车场进行实验测试,选取200 m具有不定边坡角度的环形路线。
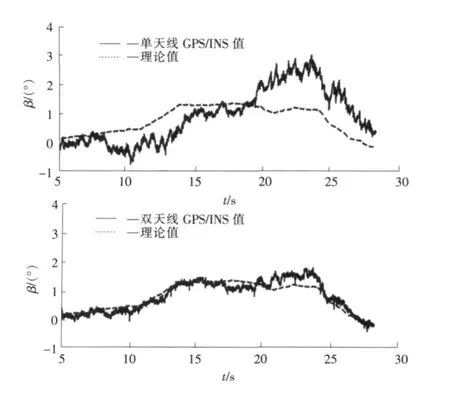
图4 GPS/INS系统估测的车辆侧偏角Fig.4 Comparison of sideslip angles w ith GPS/INS
测试车辆质量和横摆惯性矩分别为1 640 kg和3 500 kg·m2。轮胎基线长 2.8 m,前轴承担54%的车身质量,前后轮胎的侧偏刚度分别为每轴100 000 N/(°)和160 000 N/(°)。环形路线的弯角范围为 80°~ 90°;车辆速度恒定,为(8±1)m/s。测试车辆装备:1台Novatel OEM 4型GPS天线对,可进行采样频率为10 Hz的速度测量;1台双天线Novatel Beeing GPS接收器,可进行5 Hz车辆姿态(如横摆和侧倾)测量。1台200 Hz的三轴惯性测量单元(IMU),1个50 Hz的前轮转向和车轮转速传感器。IMU由3个坡度自动加速度计和速率陀螺仪组成,彼此成90°安装,由Bosch公司专为车辆稳定性控制系统研发。传感器精度(1σ):GPS测速为5 cm/s;横向加速度计为0.006 m/s2;横摆角速度传感器为 0.08°/s;测车辆姿态时为0.4°。实验数据处理依赖各台设备记录的数据中的GPS时间同步。
侧倾角的变化对侧偏角估测的影响如图4所示,道路边坡因素已经考虑进模型中去。
图4中,单天线系统中侧偏角的变化滞后理论值,因为尽管侧倾角的变化可以在偏差估测项中进行追踪,但卡尔曼滤波器在进行偏差估测时存在延时,这种延时同时反映到侧偏角上,当侧倾角增大或减小时,侧偏角估测值随之减小或增大;而双天线系统,由于侧倾情况是直接测量和补偿的,因此侧倾的变化不会过大地影响侧偏角估测,在t=23 s时差值明显,但最大误差为0.5°,满足车辆性能测试要求。
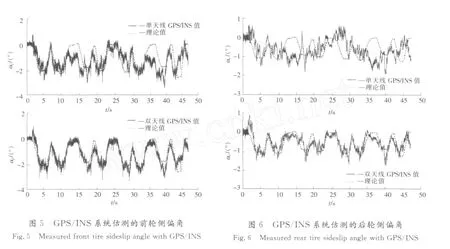
利用上述方法同样可以估测轮胎的侧偏角。图5和图6显示了轮胎的理论侧偏角和GPS/INS实验测得的侧偏角。从图5和图6中可看出,在t=15 s和t=37 s左右时,轮胎侧偏角接近为零,双天线系统的测量效果要比单天线系统好得多。说明当侧偏角较小时,双天线系统的估测精度更高。因此在确定小角度轮胎侧偏角时,对车辆侧倾角的测量精度要求较高。2种方法的测试结果显示都符合车辆性能测试要求,但双天线方法精度更高。在每个时间步长将双天线 GPS/INS系统测量的轮胎侧偏角和横向加速度测量值代入式(1)和式(2)进行计算,得到轮胎的侧偏刚度。图7所示的是转向实验中侧偏刚度随时间变化的波形图。注意实验是在相对较低的速度下进行的,车辆偏侧程度较小,得到的信号信噪比不够理想。即便如此,估测的侧偏刚度值和理论值也非常接近,误差在10%以内,满足车辆性能测试要求。在高速转向时,信噪比会升高,侧偏刚度值会进一步优化。
5 结 语
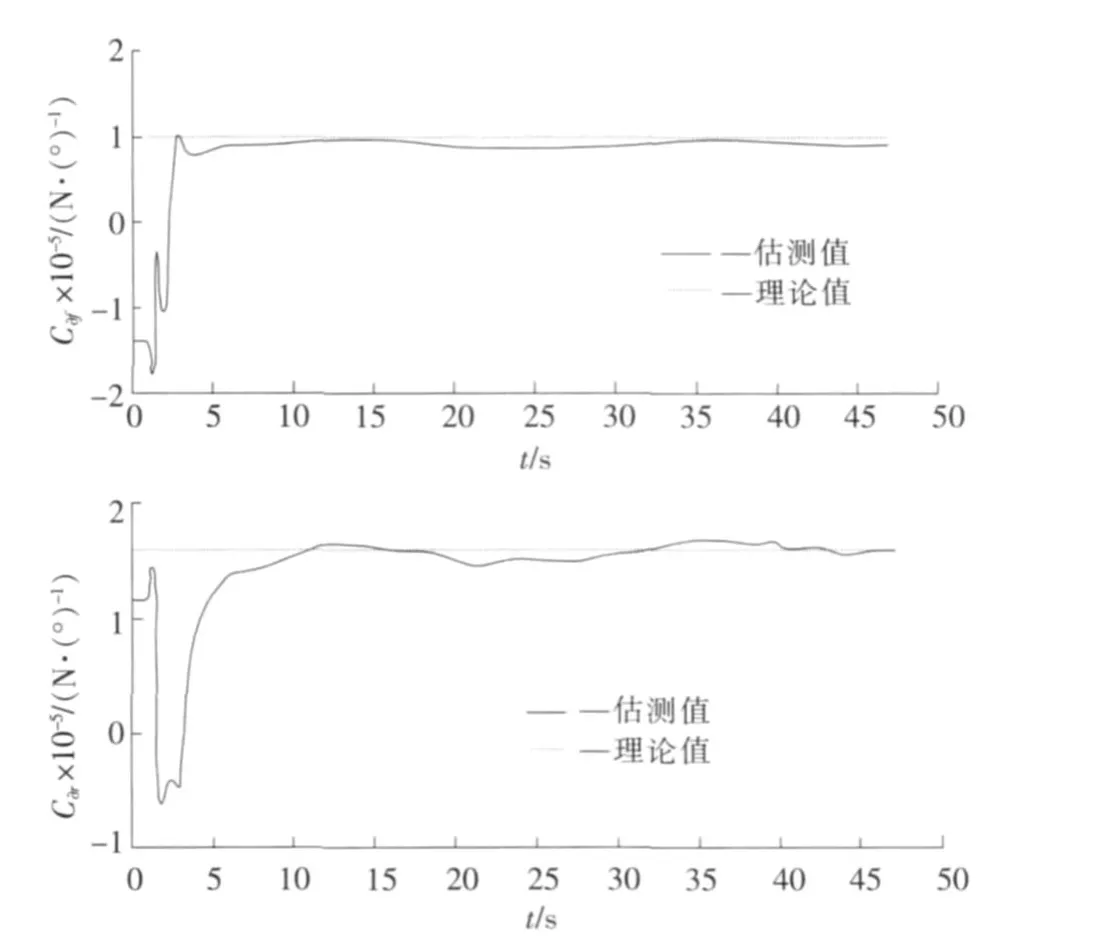
图7 双天线GPS/INS系统估测的轮胎侧偏刚度Fig.7 Estimated tire co rnering stiffnesses w ith two antenna GPS/INS
使用双天线 GPS/INS技术测量侧偏角和侧偏刚度方便、快捷、精确,不仅可以解决汽车相关测试领域中的难题,还可以广泛应用于摩托车、赛车等运动载体的侧偏测试,在未来汽车安全系统的应用中具有突出的优势。同时 GPS接收机的实时数据交换速率直接影响测试结果精度,现阶段高频 GPS接收机的关键技术都掌握在少数发达国家的企业手中,国内购买成本昂贵。相信随着中国北斗卫星的成功发射,建立中国自己的全球定位系统为期不远,与北斗导航相关的车辆姿态的测量问题是后面所要着重解决的。
[1] KIMBROUGH S.Coordinated braking and steering control for emergency stopsand accelerations[A].Proc WAM ASM E[C].A tlanta:GA,1991.229-244.
[2] VAN ZANTEN A T,ERTARAD R,PFAFF G.Control aspects of the Bosch-VDC[A].Proc AVEC[C].[S.l.]:[s.n.],1996.573-608.
[3] ALBERTI V,BABBEL E.Imp roved driving stability by active braking on the individual w heel[A].Proc Int Symp Adv Veh Control[C].[S.l.]:[s.n.],1996.717-732.
[4] HAC A,SIM PSON M.Estimation of vehicle sideslip angle and yaw rate[A].SAE 2000 Wo rld Congr[C].Detroit:M I,2000.696-697.
[5] TSENG H E.Dynamic estimation of road bank angle[A].Proc AVEC[C].Ann A rbor:M I,2000,421-428.
[6] MORELLASV,MORRIS T,ALEXANDER L,et al.Preview based control of a tractor trailer using DGPS for road departure accidents[A].Proc IEEE Conf Intell Transp Syst[C].Boston:MA,1997.797-805.
[7] HA YWARD R,MARCH ICK A,POWELL J D.Two antenna GPS attitude and integer ambiguity resolution fo r aircraft applications[A].Proc ION Tech Meeting[C].San Diego:CA,1999.155-164.
[8] 刘宏飞,许洪国,徐 溦.惰行工况下汽车列车横向稳定性分析[J].河北科技大学学报(Journal of Hebei University of Science and Technology),2009,30(3):266-270.
[9] 刘旭东,段建民,张博彦.辅助混合动力电动汽车的技术研究[J].河北科技大学学报(Journal of Hebei University of Science and Technology),2006,27(3):250-253.
Estimation of sideslip angle and tire cornering stiffness of vehicle w ith two-antenna GPS/INSmeasurement system
HU Xiao-qing1,SHANG Xiu-xiang2
(1.M ilitary Traffic Department,Xuzhou Air Force College,Xuzhou Jiangsu 221000,China;2.Four Station Department,Xuzhou Air Fo rce College,Xuzhou Jiangsu 221000,China)
This paper p resents the theory of measuring attitudesand analyses the lag of acceleration biasmeasurementw hen the vehicle rolls and the senso r drifts,using kinematic Kalman filter w ith one-antenna GPS/INSmeasurement system,then brings fo rward the way to measure directly the vehicle sideslip angle and senso r drift w ith tow-antenna GPS/INS measurement system,w hich is used to estimate the vehicle sideslip angle,tire slip angle and tire co rnering stiffness.The resultof experiment show s that the estimation of slip angles and tire cornering stiffness w ith two-antenna GPS/INSmeasurement well match the theoretical value,w hich means the two-antenna GPS/INS measurement as a direct measure method has high estimation accuracy.It can be confirmed that the technology show s unique superio rity in the application of future vehicle security system s.
GPS/INS;state estimation of vehicle;sideship angle of vehicle;tire cornering stiffness;roll angle
U 46
A
1008-1542(2011)01-0092-06
2010-08-30;
2010-11-05;责任编辑:冯 民
胡晓清(1980-),男,江苏盐城人,讲师,硕士,主要从事车辆装备方面的教学和研究工作。
