模糊鲁棒控制器在结晶过程中的应用
2011-10-20刘朝英李建增邸树纲
李 伟,刘朝英,李建增,邸树纲
(1.军械工程学院电气工程系,河北石家庄 050003;2.河北科技大学理工学院,河北石家庄050018;3.河北省高速公路京秦管理处,河北秦皇岛 066001)
结晶过程是化工及制药行业的典型操作单元,它不仅是生产过程中的重要环节,也是影响产品产量和质量的关键环节,结晶过程中晶核形成、生长与结晶过程中的温度、温度变化率、液位、搅拌速度等有关[1]。然而结晶过程是一个具有时变性、不确定性并存在耦合的复杂过程,传统的控制方法难以得到理想的控制效果,在对结晶工艺过程及控制要求具体分析的基础上,笔者提出了基于T-S模糊模型的H∞鲁棒控制算法应用于结晶过程,并利用MATLAB对系统进行了仿真。
1 结晶过程
1.1 结晶原理
固体有机物在溶剂中的溶解度与温度有关,一般随着温度的升高而增大。将固体粗产品在适当的溶剂中加热溶解,使之饱和,再将此溶液冷却,由于溶解度下降,溶液变成过饱和而析出较纯的产品,这就是结晶过程。用结晶法进行提纯是基于产品和杂质有着不同的溶解度。
1.2 青霉素结晶过程
目前中国青霉素纯化多采用间歇式共沸结晶的方法,该方法是提纯物质的重要方法,对热敏性的抗生素采用此方法结晶是提高产品质量的有效方法。青霉素钾(钠)盐均采用此法。青霉素盐共沸结晶工艺原理为青霉素盐丁醇稀释液蒸馏时形成丁醇-水二元共沸物,利用丁醇-水二组分在较宽的液相组成范围内蒸馏温度稳定,溶液沸点下降等特点,在共沸蒸馏过程中以补加丁醇的方法将水分带走,使溶液逐步达到过饱和状态而析出结晶。其工艺结晶过程如图1所示。
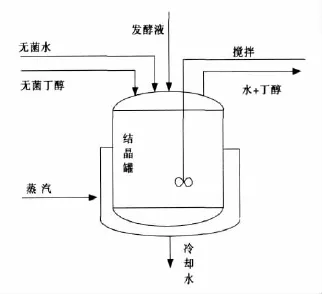
图1 青霉素结晶过程Fig.1 Penicillin crystallization process
2 青霉素结晶过程数学描述
由结晶过程工艺要求可知,结晶罐温度θ及温度变化率˙θ的控制需要通过调节蒸汽流量Q1实现,结晶罐液位H的控制需要通过调整丁醇补充量Q2来实现。但蒸汽流量Q1改变不仅改变结晶罐温度θ及温度变化率˙θ,同时,蒸汽流量Q1的增加,会导致结晶罐液位H降低。丁醇补充量Q2的增加,会导致结晶罐温度θ减少,但这种影响较小,与其他参数相比可以忽略不计,因此可得数学描述如下:

其中:K11为温度变化对蒸汽流量的静态增益;K21为液位对蒸汽流量的静态增益;K22为液位对丁醇流量的静态增益;T1,T2分别为蒸汽对夹套温度的时间常数和夹套温度对结晶罐内液体温度的时间常数[2]。
结晶过程中,结晶罐温度控制和液位控制间存在一定的耦合,而且K11,K21,K22及T2均随结晶罐内液体成分的改变而改变;即该对象有一定的时变性,由此传统控制难以得到良好的控制效果。
3 模糊鲁棒控制器
笔者针对青霉素结晶过程机理复杂,系统具有非线性、时变性和较大的滞后性,难以建立被控对象精确数学模型的特点,建立系统的T-S模糊模型,设计状态反馈H∞控制器,以LMI为优化工具,进行仿真研究。
3.1 T-S模糊模型
T-S模糊模型是一种本质非线性模型,易于表达复杂系统的动态特性,其主要思想是:每条模糊语句所表征的建模对象的局部动态特性用线性模型作为后件来表达,然后通过模糊隶属函数将这些线性模型综合起来构成全局模糊模型[4-10]。其典型的语言规则为

对于一个MIMO的非线性动态系统,如果T-S模糊模型后件采用状态空间方程表示,则模糊规则可写成

i为模糊规则数,Nij是模糊集合,θ(t)=[θ1(t),θ2(t),…,θg(t)]T是模糊规则的前件变量。
3.2 状态反馈H∞控制
H∞鲁棒控制理论是为具有模型摄动且MIMO系统提供的一种设计鲁棒控制器的新方法,是在H∞空间通过某些性能指标的无穷范数解析优化而获得的鲁棒控制器,它可以很好地解决LQG理论不适于模型摄动情况及常规频域理论不适于MIMO系统设计的情况。
对一个具体对象的数学模型来说,由于参数的不确定性与变化性,以及为了设计与计算的方便,就会简化对象模型,因此造成对象模型存在一定的误差。H∞鲁棒控制的目的就是:当存在模型误差时,如何利用对象模型来设计控制器,使得所设计的控制器在被控对象稳定的同时使某一目标函数T的H∞范数最小。
假设连续系统的被控对象G(s)的状态方程描述为

其中状态x和干扰输入w是可以直接测量的,则状态反馈H∞控制就是要设计一个控制器

使得闭环系统:

是渐近稳定的,且其闭环传递函数‖Tzw(s)‖∞的H∞范数满足:

设计状态反馈H∞的方法如下。
定理1 对系统(3)来说,存在一个状态反馈H∞控制器,当且仅当存在一个对称正定矩阵X和矩阵W时,使得如下的矩阵不等式

成立。进而,如果矩阵不等式(7)存在可行解X*,W*,则u=W*(X*)-1x是系统(4)的一个状态反馈H∞控制器[11-18]。
3.3 状态反馈H∞控制器的设计
根据结晶的工艺过程,建立T-S模糊模型,设计状态反馈H∞控制器。其结构图如图2所示。

图2 状态反馈H∞控制器Fig.2 H∞state feedback controller
首先将结晶过程的数学模型转化为状态空间方程的形式,即:

由结晶工艺过程可知在结晶过程中结晶罐内的溶液密度随着温度的变化而不断变化,即丁醇和水分的含量是变化的。由相关书籍可知丁醇的沸点为35℃,因此研究对象温度在20~40℃变化,根据结晶罐内丁醇和水分的含量随着温度的变化而不断变化,选取温度θa作为模糊模型的前件,建立青霉素结晶过程温度的T-S模糊模型。设θa=x1=x2,则温度系统的T-S模糊模型可作如下描述。

其中:

采用定理1对结晶过程的温度系统(8)设计状态反馈H∞控制器,利用MATLAB解矩阵不等式(7),得到使温度系统渐近稳定,且满足系统性能指标的状态反馈矩阵为

4 仿真及分析
根据实际青霉素结晶的初始条件,对设计的控制器进行仿真,其结构图如图2所示,其中T1=13.2s,T2=189s,T3=53.1s,K11=0.18,K21=0.48,K22=1.01。
仿真结果如图3—图5所示。图3为结晶过程温度响应曲线,图4为温度系统的参数K2发生变化时仿真曲线,图5为温度系统的参数t2发生变化时的响应曲线,其中曲线1为状态反馈H∞控制器作用下的温度响应,曲线2为传统PID控制器作用下的温度响应。由图3可看出,状态反馈H∞控制器作用下的系统响应速度较快,调节时间较短,控制效果较好,而PID控制器作用下的系统响应速度较慢,调节时间较长并存在一定的超调。由图4、图5可看出,当温度系统的参数K2,t2发生变化时,传统PID控制器作用下的系统响应即曲线2因系统参数发生变化,响应速度变慢,调节时间变长并存在一定的振荡现象,不能达到较好的控制效果。而状态反馈H∞控制器作用下的系统响应即曲线1并没有因为系统参数的变化出现振荡现象,系统响应曲线仍然较平稳,控制效果较好。由此可以看出相对于传统PID控制,状态反馈H∞控制器作用下系统响应速度较快,调节时间较短,稳定性较高,即使在系统受到干扰的情况下仍可以具有较好的控制效果,更好的提高了系统的稳定性。

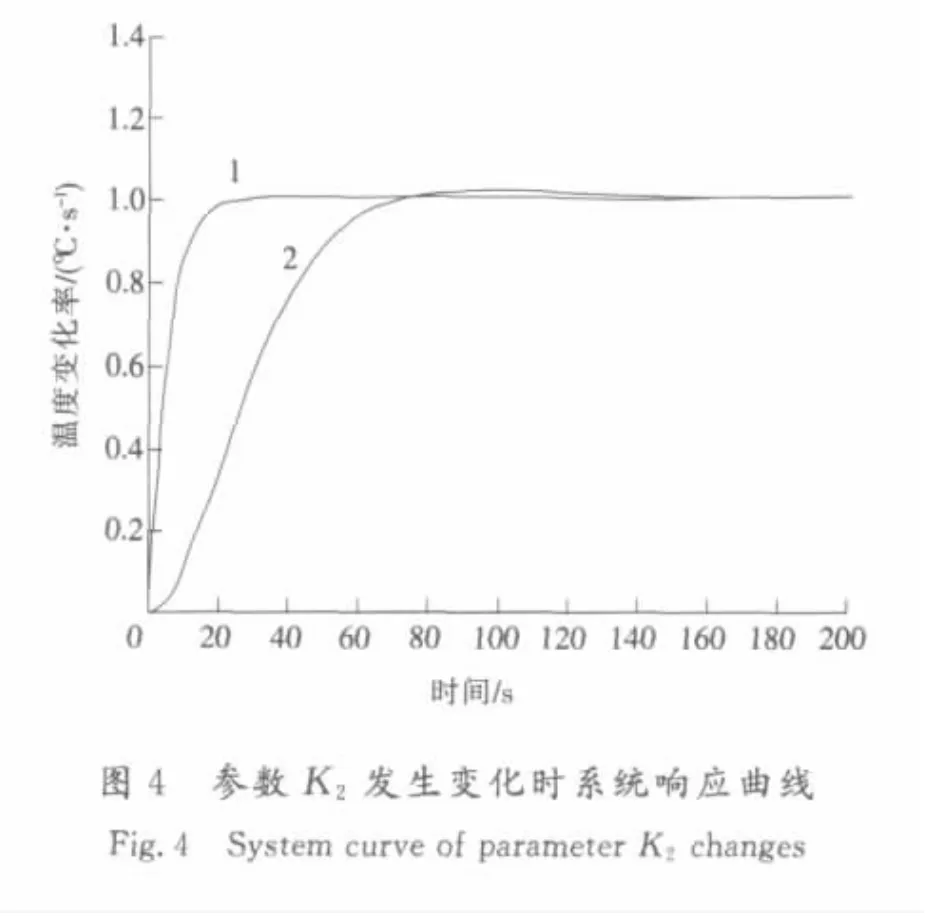
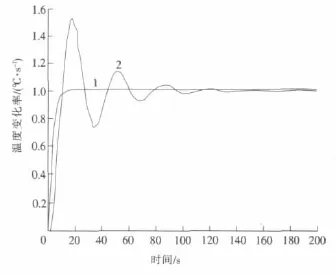
图5 参数t2发生变化时系统响应曲线Fig.5 System curve of parameter t2changes
[1] 叶铁林.化工结晶过程原理及应用[M].北京:北京工业大学出版社,2006.
[2] 刘朝英,宋哲英,宋雪玲.模糊解耦控制在青霉素结晶过程中的应用[J].河北工业大学学报(Journal of Hebei University of Technology),2005,34(8):19-22.
[3] 郭庆祝,孟维明,宋 扬,等.模糊控制技术发展现状及研究热点[J].自动化博览(Automation Panorama),2005,6(4):68-70.
[4] 刘晓东,张庆灵,王 岩.关于T-S模糊系统的稳定性[J].东北大学学报(自然科学版)(Journal of Northeastern University(Natural Science)),2002,23(6):531-534.
[5] 黎 倩,刘朝英,宋哲英,等.模糊控制在循环流化床锅炉床温控制系统中的应用研究[J].军械工程学院学报(Journal of Ordnance Engineering College),2009,21(5):72-75.
[6] 徐小平,刘朝英.模糊解耦控制器设计及应用[J].河北工业科技(Hebei Journal of Industrial Science and Technology),2008,25(5):35-38.
[7] 李盼盼.基于T-S模型的非线性系统模糊辨识方法研究[D].南京:江苏大学,2008.
[8] 黎 倩.模糊鲁棒控制在循环流化床锅炉控制中的应用研究[D].石家庄:河北科技大学,2010.
[9] 王惠芳,刘朝英,宋雪玲,等.基于遗传算法的模糊控制器参数优化[J].河北科技大学学报(Journal of Hebei University of Science and Technology),2007,28(4):276-278.
[10] 罗秋滨,谢元贞.非线性系统的模糊建模方法研究[J].哈尔滨理工大学学报(Journal of Harbin University of Science and Technology),2006,11(6):16-18.
[11] 褚 健,俞 立.鲁棒控制理论及应用[M].杭州:浙江大学出版社,2004.
[12] 刘朝英,王惠芳,宋雪玲,等.一种改进的模糊调节神经网络及其应用[J].河北科技大学学报(Journal of Hebei University of Science and Technology),2008,29(4):295-297.
[13] TANAKA K,IKEDA T,WANG H O.Robust stabilization of a class of uncertain nonlinear systems via fuzzy control:Quadratic stability,control theory,and linear matrix inequalities[J].IEEE Transactions on Fuzzy Systems,1996,4(1):1-13.
[14] 汤 伟,施颂椒,王孟效,等.鲁棒控制理论中3种主要方法综述(一)[J].西北轻工业学院学报(Journal of Northwest Institute of Light Industry),2000,18(4):54-59.
[15] LIU Chao-ying,LI Wei,SONG Xue-ling.Application of robust regulator in crystallization process[J].Proceedings-International Conference on Intelligent Computation Technology and Automation,2008,1(1):1 004-1 007.
[16] LIU Chao-ying,SONG Xue-ling,SONG Zhe-ying.Investigation on application of fuzzy decoupling control into penicillin crystallization process[J].IEEE International Conference on Machine Learning and Cybernetics,2005,4(14):762-766.
[17] LIU Guo-cai,LIU Chao-ying.Study on the all-coefficient adaptive sequential decoupling control[J].International Journal of Modelling,Identification and Control,2009,3(4):180-185.
[18] LO J C,LIN M L.Robustnonlinear control via fuzzy static output feed back[J].IEEE Transactions on Circuits and Systems I:Fundamental Theory and Applications,2003,50(11):1 494-1 502.
