基于单幅图像目标空间定位的算法研究
2011-10-20王娟,赵艳
王 娟,赵 艳
(1.燕山大学信息科学与工程学院,河北秦皇岛 066004;2.中国人民武装警察部队学院基础部,河北廊坊 065000;3.河北科技大学信息科学与工程学院,河北石家庄 050018)
随着计算机视觉研究领域的不断发展,近年来,基于单幅图像进行目标定位以及三维重建的研究成为了该领域的热点之一。根据二维图像来确定目标方位的传统研究一般是建立在照相机、摄像机内部参数均为确定的基础上,并且需要至少2台照相机、摄像机设备对目标在不同的方位成像才能实现空间定位。国内外一些学者在目标空间定位方面的研究取得了一些成果。于艳提出了根据灭点属性确定摄像机内、外参数,将目标物体转化为长方体模型,考虑到单幅图像中相对深度对长方体长、宽、高3参数的精度影响颇大,对相对深度算法进行改进,进而计算出目标物体特征点的三维坐标[1]。张小虎等针对无目标距离信息和目标上已知控制点的单像机成像情况,提出了一种单像机对运动目标定位的新方法:共线方程法[2]。余绍鹏等以Intel公司开发的开源计算机视觉库OpenCV作为定位系统的开发工具,在对目标平面上已知的参考特征点与其在二维图像上的投影只进行一次匹配训练,便能够由单幅二维图像确定目标方位[3]。
笔者在照相机、摄像机内部参数未知的情况下,通过图像中已知标盘上的控制点对照相机进行标定,并提出了用共面四线的方法来解决空间目标定位问题。
1 基于单幅图像的目标空间定位的算法
在目标空间定位系统中存在3种坐标系,分别是照相机坐标系、图像坐标系和世界坐标系。如何更准确地在这3种坐标系间进行坐标转换,是实现测量精度的关键。笔者实现了在照相机、摄像机内部参数未知的情况下,实现目标的空间定位,并将其用于交通事故处理系统中的测距模块,系统框架图如图1所示。在该系统中,首先,将从照相机、摄像机得到的二维图像进行预处理并用Prewitt算子提取边缘;接着,采用基于轮廓特征和拓扑关系的图像检索方法将标盘中的特征点从图像中识别提取出来;然后,用本文所述方法将目标物体上的点或线与其在二维图像上的投影相匹配,从而确定目标的空间方位;最后,实现二维图像的空间测距。
1.1 图像预处理
由照相机、摄像机获得的图像一般都存在噪声,这些噪声会影响可视化处理的结果。因此需要通过滤波的方法使噪声对原始数据的影响达到最小。低通滤波可以去掉大部分噪声,但会使图像的细节失真;高通滤波虽然加强了图像的边缘细节,但是也同时加强了噪声信息,笔者采用3×3中值滤波进行降噪处理,这种方法在有效消除脉冲噪声的同时,保护了图像的细节。图像降噪后,边缘检测的效果得到了明显改善。
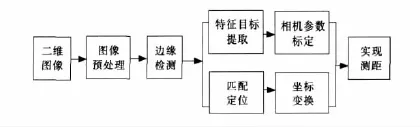
图1 系统框架图Fig.1 System diagram
1.2 特征目标的自动识别提取
确定物体的形状轮廓及其内部对象间的空间关系是进行目标定位的基础,也是进行图像识别的重要依据。笔者提出了一种基于轮廓特征和拓扑关系的特征区域提取方法。首先利用空间拓扑关系进行图像分割;然后提取特征区域轮廓特征。
图像的区域分割是根据对象之间的空间拓扑关系来完成的。EGENHOFER等根据2个空间对象关系的9交模型中的512种可能关系,提出用8种面面关系(分离、包含、包含于、覆盖、覆盖于、等价、相交和相接关系)来描述图像中对象之间的空间拓扑关系[4]。图像对象之间的空间拓扑关系的形式化表达如图2所示。

图2 图像对象之间的拓扑关系Fig.2 Topological relationships between objects in the image
若把标盘区域特征(其他内部边界特征暂不考虑)作为一个整体,并假设为区域1,把整个外围背景假设为区域2,则二者关系为分离的关系。标盘的内部:黑色圆形、白色正方形,黑色边框为包含或者包含于。根据这种关系把标盘区域分离出来。
1.3 用Prewitt算子提取边缘
边缘是指周围像素灰度有阶跃变化或屋顶变化的那些像素的集合,它存在于目标与背景、目标与目标、区域与区域、基元与基元之间,是图像最基本的特征,是图像分析与识别的重要环节[5]。目前,一般的边缘检测算子包括Canny算子、Roberts算子、Laplace算子、Sobel算子、Prewitt算子等。基于形状特征的图像检索主要是使用图像中目标对象的轮廓作为检索特征,经过实验比较,采用Prewitt算子作为边缘检测算子。
2 确定目标方位及相机内参数的方法
笔者采用特征目标上的共面四线与其在图像上的投影相匹配的方法。在此问题中涉及到3个坐标系:图像坐标系(oi,xi,yi)、世界坐标系(Ow,Xw,Yw,Zw)和照相机坐标系(Oc,Xc,Yc,Zc)。图像坐标系与照相机坐标系的关系见式(1):

其中,R1是照相机内部参数矩阵。照相机坐标系与世界坐标系之间的关系见式(2):

式中:R2为3×3的旋转矩阵,T为位移矩阵[6-7]。
3 实验结果
表1为实际测量值与测距系统值的误差分析。图3为实验结果,其中图3a)为通过照相机、摄像机获得的二维图像;图3b)是经过中值滤波后的图像;图3c)为经过Prewitt算子边缘提取后的图像;图3d)为目标特征区域。目标物体的空间方位的标定,就是通过目标区域特征点和它们在二维图像中的投影相匹配,从而确定目标的空间方位。

表1 平面测距比较Tab.1 Plane distance measurement comparison
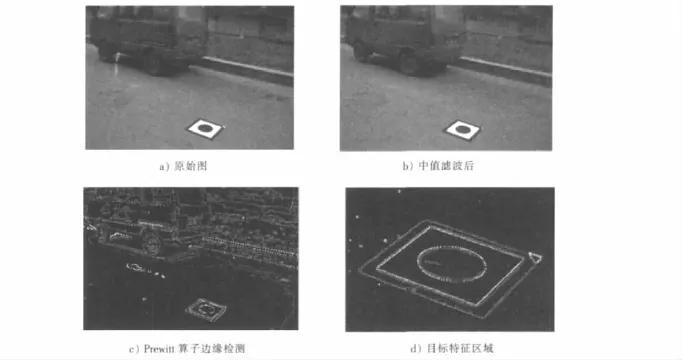
图3 实验结果Fig.3 Experimental results
4 结 语
在照相机、摄像机内部参数未知的情况下,提出了一种利用特征目标上共面四线与其在二维图像中的投影相匹配的方法来确定目标的三维空间方位。为了提高系统的检测精度,引入了基于拓扑关系的目标区域分割方法把待处理的图像区域分割出来,并使用Prewitt算子提取该区域边缘。实验结果表明,笔者采用的算法测距精度较高且鲁棒性较好。当然,本算法还有不足之处,比如待测物体距离白色标盘较远时,测量误差稍大。
[1] 于 艳.基于单幅图像目标定位及三维重建的研究[D].南京:南京理工大学,2009.
[2] 张小虎,邸 慧,周 剑,等.一种单像机对运动目标定位的新方法[J].国防科技大学学报(Journal of National University of Defense Technology),2008,28(5):114-118.
[3] 余绍鹏,冯凌云.基于OpenCV的二维定位系统设计[J].贵州大学学报(自然科学版)(Journal of Guizhou University(Natural Science Edition)),2010,27(5):63-66.
[4] EGENHOFER M J,SHARMA J,MARK D M.A critical comparioin of the 4-intersection and 9-intersection models for spatial relations:Formal analysis[J].AutoCarto,1993(11):1-11.
[5] 李立冬.单幅图像基础上的交通事故现场三维重建[D].天津:河北工业大学,2005.
[6] 黄凤荣,刘教民,孙壮志,等.基于单幅图像确定目标空间方位新方法的测距系统[J].计算机工程与应用(Computer Engineering and Applications),2002(4):236-239.
[7] 金为铣.摄影测量学[M].武汉:武汉测绘科技大学出版社,1996.
[8] 王彦霞,王震洲,刘教民.基于双目立体视觉的三维建模算法[J].河北科技大学学报(Journal of Hebei University of Science and Technology),2008,29(3):219-222,249.
[9] 张 军,唐心亮,王震洲,等.DSP/BIOS实时系统在电智能断路器中的应用[J].河北科技大学学报(Journal of Hebei University of Science and Technology),2010,31(6):542-545.
