基于单片FPGA的谐振式光纤陀螺数字系统设计与实现
2011-10-19姚灵芝马慧莲金仲和
姚灵芝,马慧莲,金仲和
(浙江大学信息与电子工程学系,杭州 310027)
谐振式光纤陀螺(Resonator Fiber Optic Gyro,RFOG)是一种基于Sagnac效应的高精度新型传感器,其敏感器件光纤环形谐振腔(Fiber Ring Resonator,FRR)可以采用很短的光纤或集成光学的方法实现,因而在小型化和集成化上具有独特的优势[1-2]。由于Sagnac效应是一种极其微弱的效应,信号检测技术在RFOG中占有重要的地位。相比于模拟电路,基于数字电路的检测系统具有稳定性好、抗干扰能力强、处理速度快和体积小等优势。因此,系统的数字化是RFOG向高精度和小型化发展的必经之路。
本方案以单片现场可编程门阵列(Field Programmable Gate Array,FPGA)为核心硬件单元,利用调相谱检测原理[3],设计了基于正负斜率组合锯齿波相位调制的谐振式光纤陀螺全数字闭环处理系统,包括调制信号的产生、信号的同步解调以及数字反馈控制等功能。重点实现了基于比例积分(Proportion Integration,PI)控制技术的谐振频率伺服回路、相位调制器(Phase Modulator,PM)的复位电压漂移补偿回路和第二闭环反馈控制回路。三个回路的设计和实现,使谐振式光纤陀螺在锁频精度、检测精度和动态范围等方面得到一定的提高和改善。另外,以前的PM复位电压漂移补偿回路和第二闭环反馈控制回路方案都是在开环检测系统的基础上通过增加仪器或器件来实现的,增加了整个检测系统的复杂程度和体积。而本方案将整个检测系统集成到单片FPGA中,为谐振式光纤陀螺的小型化和集成化提供了一条技术途径。
1 RFOG基本原理
RFOG是基于Sagnac效应的光学传感器,通过检测由Sagnac效应引起的非互易谐振频率差测量旋转角速度[1]。基于正负斜率组合数字锯齿波相位调制技术的谐振式光纤陀螺系统结构如图1所示。
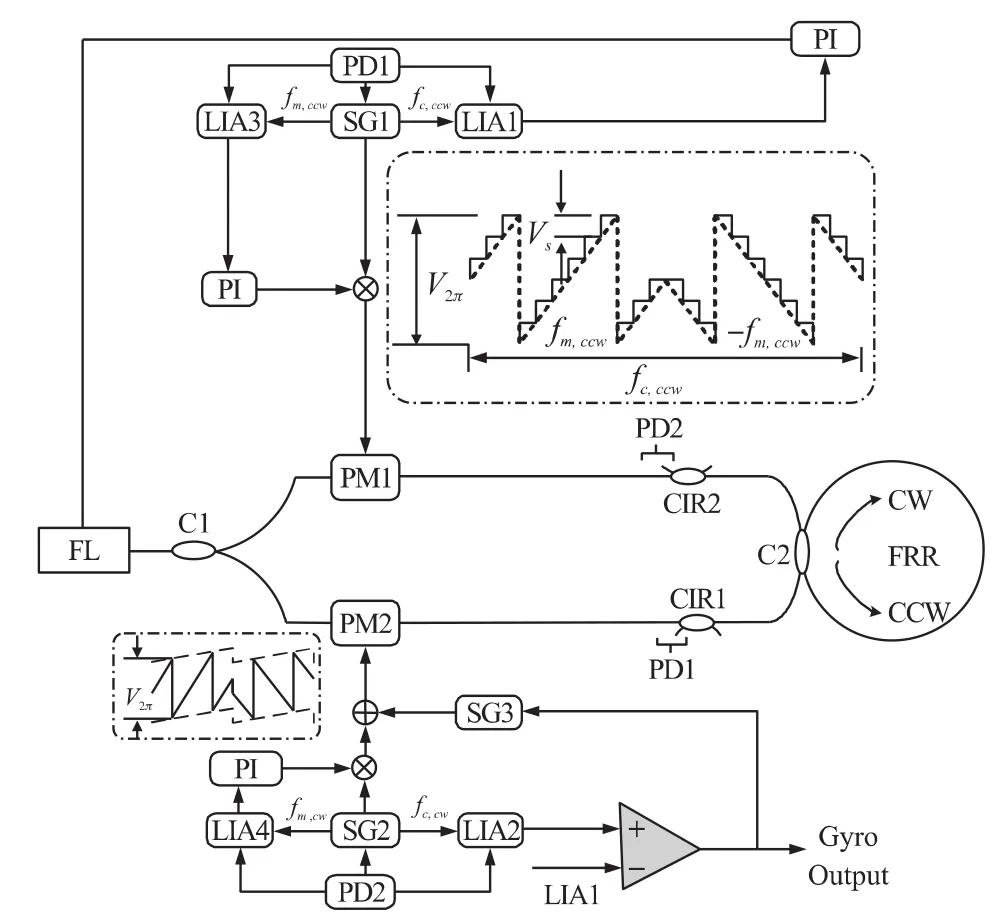
图1 正负斜率组合数字锯齿波调制的RFOG系统框图
锯齿波相位调制的方式可以等效为对输入到相位调制器的激光中心频率进行移频[4],利用正负斜率组合锯齿波的相位调制,可以实现双频率调制效果。系统中所用光纤均采用保偏光纤,光纤激光器(Fiber Laser,FL)的中心波长和线宽分别为1550 nm和50 kHz。由FL输出的激光经光纤耦合器C1后被分成功率相等的两束光波,分别通过LiNbO3相位调制器PM1和PM2,由正负斜率组合的数字锯齿波进行相位调制后进入FRR,形成顺时针(Clockwise,CW)和逆时针(Counter Clockwise,CCW)方向的两束谐振光波,最后分别由光纤环形器CIR1和CIR2耦合到光电探测器(Photodetector,PD)PD1和PD2。根据光电探测器输出光强与谐振频率偏差的关系[5],PD探测到的信号经过FPGA进行信号处理,最终得到RFOG的旋转角速度。
单片FPGA上实现的数字信号处理过程主要包括第一闭环、第二闭环和相位调制器复位电压反馈控制环路。第一闭环是通过比例积分反馈将激光器中心频率锁定在谐振腔CCW路的谐振频率之上,减小由于激光器中心频率和谐振腔谐振频率波动造成的影响。第二闭环首先依据Sagnac效应产生的CCW和CW路的谐振频率偏差产生等效移频锯齿波调制信号,通过将该调制信号叠加于原先施加在PM2上的正负斜率组合锯齿波上,从而跟踪锁定CW路的谐振频率,等效移频锯齿波信号即比较器输出端可反映RFOG的转动信息。根据光纤环形谐振腔对不同复位电压的响应特性[6],相位调制器复位电压反馈控制回路通过PI反馈控制将复位电压控制在相位调制器的全波电压上,从而动态、实时实现CW和CCW环路的最佳载波抑制。
2 全数字化RFOG系统设计和实现
2.1 谐振频率伺服回路
谐振式光学陀螺的调制解调方式必须至少锁定其中一个方向传播的光波,利用频率伺服回路使激光器的输出光频率始终处于谐振状态,通过间接探测另一方向传播光波与激光器的频率差得到RFOG的旋转角速度。频率跟踪锁定技术将直接影响陀螺的实际检测精度。在图1所示RFOG系统中,锁相放大器(Lock-in Amplifier,LIA)LIA1解调输出谐振腔CCW方向光波,经PI控制器后反馈控制激光器中心频率,使得激光器中心频率跟踪锁定谐振腔CCW方向光波谐振频率。与基于一阶惯性环节实现的激光器频率跟踪锁定方案相比[7],基于PI控制器的谐振频率伺服技术,有利于消除锁定残差和提高锁频环路的精度[8-9]。
PI控制器通过对误差信号e(t)进行比例和积分运算,并将运算结果进行加权相加得到控制器的输出u(t),其数学表达式可以表示为:

式中u(t)为PI控制器的输出信号,e(t)为输入误差信号,Kp为比例系数,Ti为积分时间。
对式(1)进行离散化,以求和运算代替积分运算后可在FPGA中实现全数字PI控制器。
将激光器中心频率锁定在光纤环形谐振腔谐振频率上后,观察锁相放大器输出信号。如图2所示,在500 s内输出信号的波动约为5 mV,信号的波动即反映锁定环路的控制精度[8]。根据实际系统测试得到的标度因数为77.5 mV/(°/s),可以计算得到对应角速度检测精度约为8.7°/h。
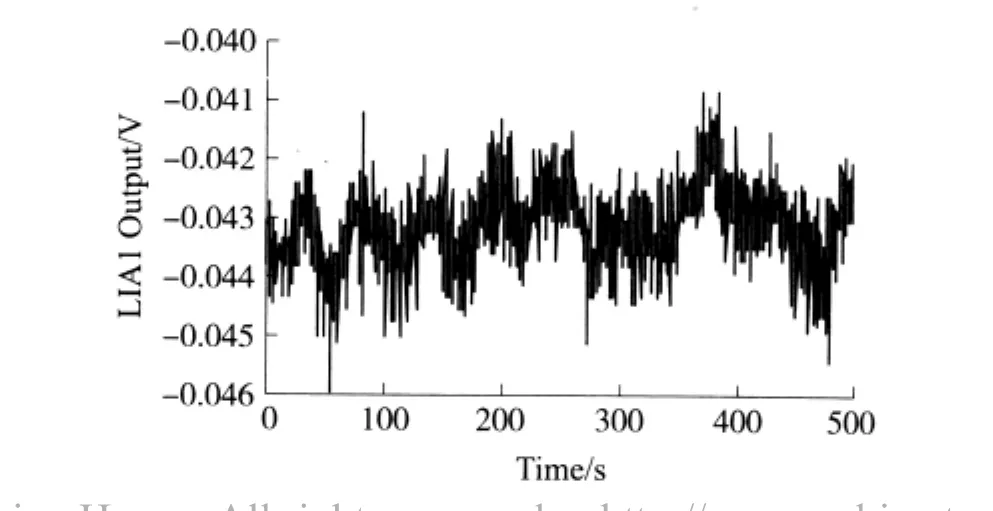
图2 CCW路锁定后解调输出信号
2.2 相位调制器复位电压反馈控制回路
背向散射噪声是RFOG的主要噪声之一。T.J.Kaiser等人对背向散射噪声进行了测试分析[10],给出了计算腔内背向散射光波产生的陀螺输出噪声的经验公式为:

式中c为真空中的光速;λ0为真空中的光源波长;N为载波抑制的个数,N=0、1、2分别表示CW/CCW环路没有施加载波抑制、其中一路施加载波抑制以及双路同时施加载波抑制;D为FRR的直径;L为FRR的光纤长度;σ表示FRR腔内等效散射系数,可以通过对谐振腔背向散射特性进行具体测试获得[11];ΔV=Va-Vopt,其中Va表示施加在相位调制器上的调制电压幅度,Vopt表示最佳载波抑制时所对应的最佳调制电压幅度值,(ΔV/Vopt)表示载波抑制比。
为了避免在PD输出端引入背向散射噪声,需要对载波分量进行抑制。基于正负斜率组合锯齿波调制的光场,其载波分量的表达式为:

式中M=π·Va/Vπ为调相系数,Va为锯齿波电压幅度(即复位电压的一半),Vπ为相位调制器的半波电压。
根据式(3),从抑制背向散射引入的噪声出发,当调相系数M=π时,载波分量A0=0,此时载波幅度Va等于相位调制器半波电压Vπ。另外,为了实现锯齿波的线性相位调制,同样需要载波电压等于相位调制器的半波电压[6]。利用自外差系统测试光载波抑制比与相位调制器上调制电压间的关系[12],结果如图3所示。实测的载波抑制比与理论值基本吻合,而在最佳调制指数(M=π)附近发生偏差,这可能是由测试系统背景光功率波动及测试光源频率噪声等因素引起。由图3可知,通过调整锯齿波复位电压比较容易实现45 dB的载波抑制比。考虑到实际LiNbO3相位调制器半波电压随温度的变化率约为 500×10-6V/℃[13],温度变化时,正负斜率组合锯齿波不精确的复位电压施加到相位调制器上会给系统引入附加噪声[14]。这就需要设计反馈控制回路使加载在PM上调制波形的复位电压动态、实时保持在调制器全波电压数值上。
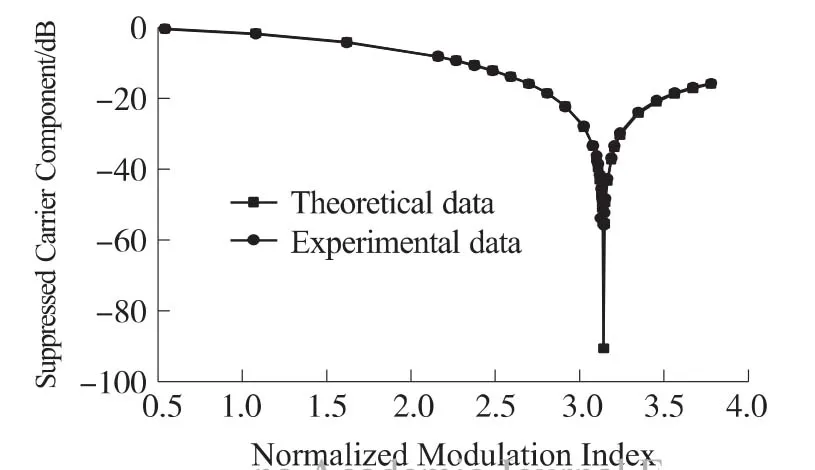
图3 锯齿波调制指数与光载波抑制比关系
考虑到实际锯齿波复位时间不为零,因此FRR输出光场存在对复位信号的瞬态响应过程,且FRR产生的瞬态响应和拖尾信号特性依赖于复位电压[8]。以锯齿波调制频率为参考频率对不同复位电压下的拖尾进行方波同步解调,得到如图4所示的结果。可以看到,当调制电压峰峰值(2Va)在5.75 V~6.15 V变化时,解调输出信号与调制电压峰峰值成近似线性关系,并且当调制电压峰峰值为5.92 V时,解调输出信号为0,因此该相位调制器的全波电压(2π电压)为5.92 V。利用解调输出信号和调制电压峰峰值的线性关系以及解调输出零点,将拖尾的解调信号通过PI控制器处理后反馈到调制信号发生器的增益控制端,从而对施加在相位调制器上的正负斜率锯齿波幅度进行实时反馈控制。初始复位电压小于2π电压和大于2π电压的实验结果如图5所示。由图可知,研制的反馈控制回路技术,经短暂振荡后能够将调制锯齿波峰峰值较快锁定到相位调制器的2π复位电压上。
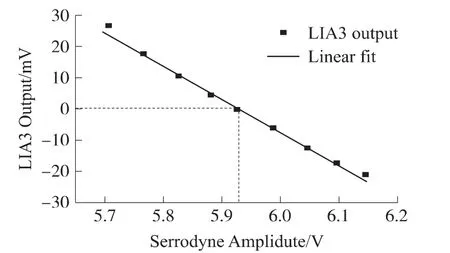
图4 非理想锯齿波2π复位电压的解调输出
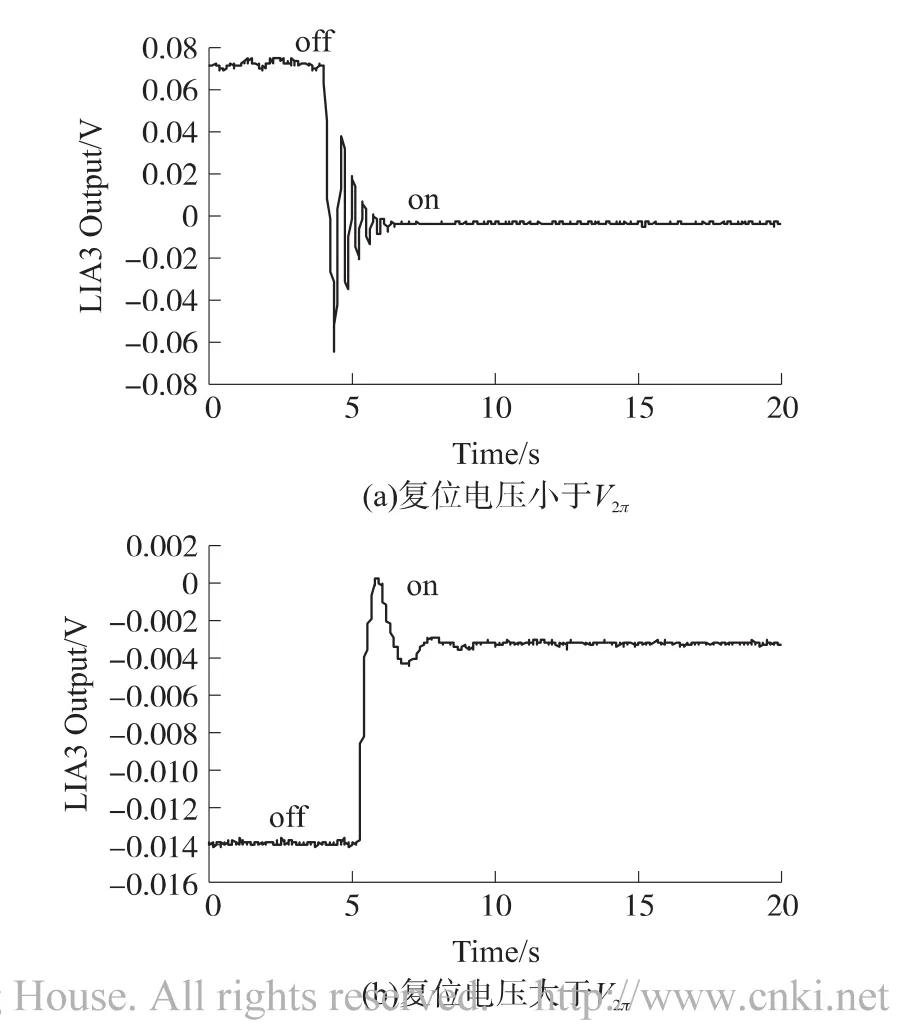
图5 不同复位电压下反馈加入前后误差信号输出
2.3 第二闭环反馈控制环路设计
通过对PM调制波形进行反馈控制将激光频率锁定在CW路的谐振频率上,称之为第二闭环。这样两路激光锁定在各自的谐振频率上,从而可以得到反映陀螺转动角速度的谐振频差信号。第二闭环的加入能够使陀螺始终工作在解调曲线零点附近的线性区,有利于增大陀螺信号的动态范围,同时可有效抑制两路互易性噪声的影响。
第二闭环的原理是在PM上叠加一个等效移频锯齿波,该等效移频锯齿波斜率体现RFOG旋转引起的Sagnac频差信号,其结构如图6所示。锯齿波斜率由台阶持续时间τ和台阶高度step共同决定。在选定τ的情况下,通过改变台阶高度即可实现锯齿波斜率的改变。将CW和CCW两路解调信号通过比较器后,对锯齿波的台阶高度作±1 LSB(DAC的最小改变量)的改变,这样调制波形斜率变为±fm,CW±Δfs(Δfs为1 个 LSB 对应的频率改变量)。通过对台阶高度量进行累加,得到移频锯齿波。再对比较器的输出Δstep信号进行数字式积分,即可得到频差信号为:

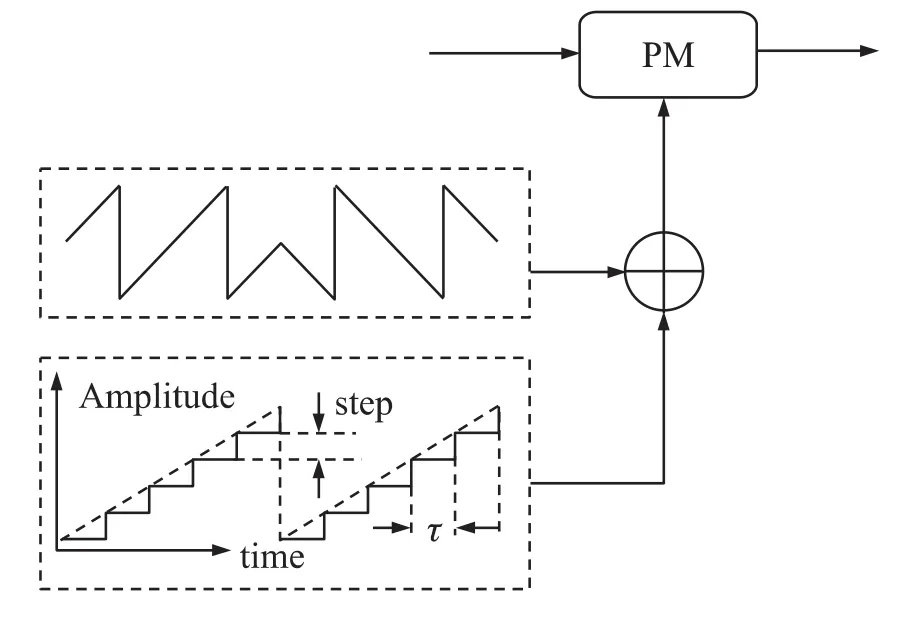
图6 移频调制光路模型
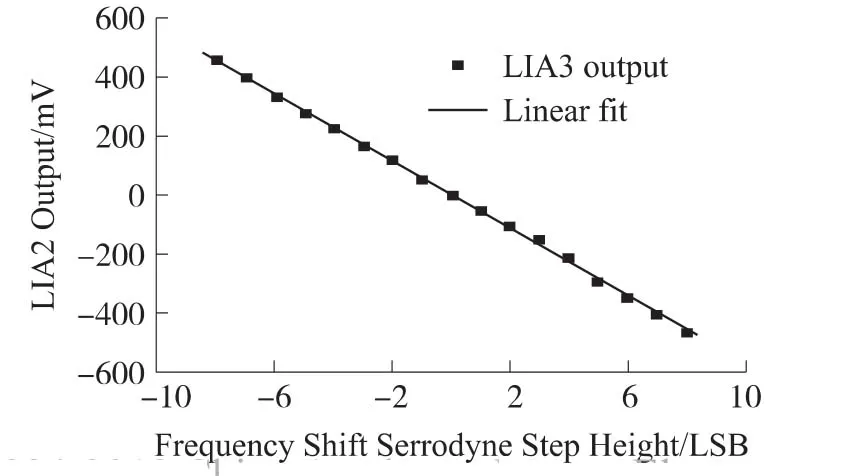
图7 移频测试曲线
在CCW路锁定的情况下,将各种斜率不同的移频锯齿波分别叠加到正负斜率组合锯齿波上,然后对光进行相位调制。观察两路解调信号的差值电压变化,测试结果如图7所示。可以看出,移频锯齿波的台阶高度每变化±1 LSB,输出电压信号变化±58.1 mV。根据实验标度因数为 77.5 mV/(°/s),且1°/s对应774 Hz频差,单位移频锯齿波的等效移频量为580.25 Hz。将陀螺系统放置于转台上,观察加入反馈环路前后CW和CCW两路解调差值信号的变化,实验结果如图8所示。可以看到,加入反馈回路后,信号锁定到0附近,补偿了因转动引起的开环信号量,顺利实现了闭环功能。
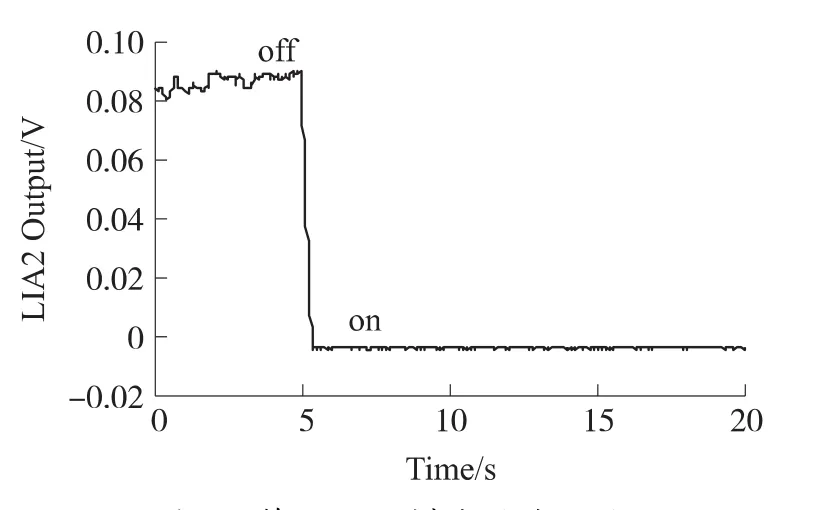
图8 第二闭环模块功能测试
3 系统测试
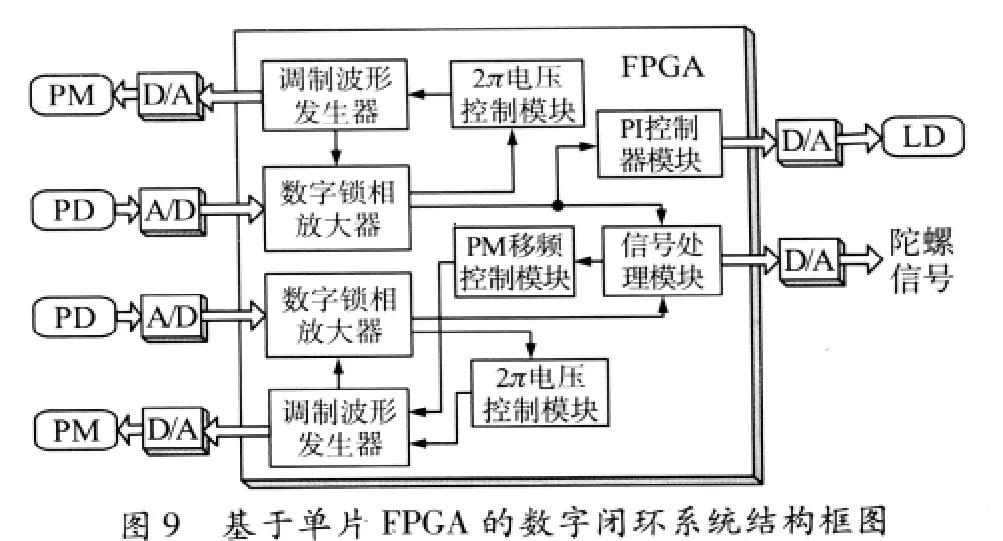
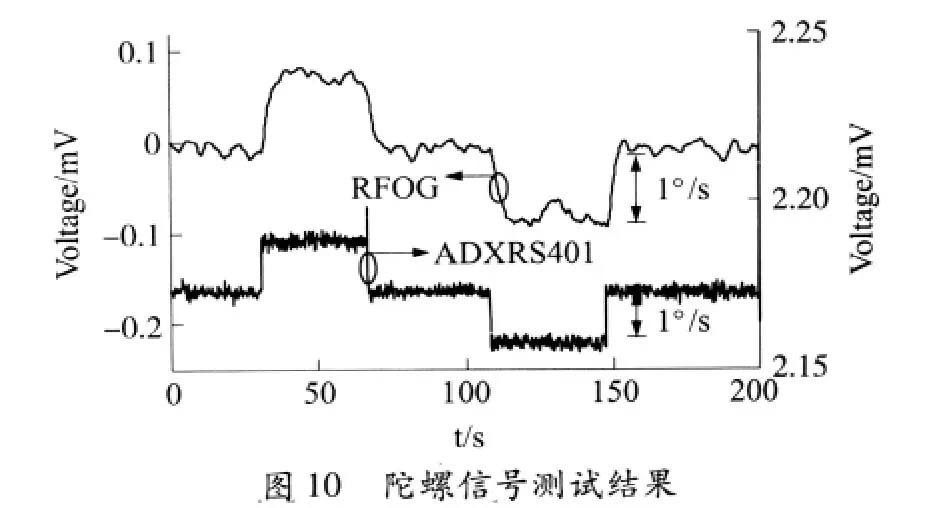
陀螺数字闭环系统以单片FPGA为核心进行设计,其框图如图9所示,主要包括调制波形发生器、数字锁相放大器、PI控制器、相位调制器全波电压控制、PM移频控制、信号处理等模块。根据实际测试结果,研制的谐振式光纤陀螺输出信号的标度因数为77.5 mV/(°/s)。图10为转速为1°/s时,陀螺输出信号测试结果。其中上面曲线为RFOG输出信号,下面曲线为Analog Devices公司的MEMS陀螺ADXRS401(标度因数为15 mV/(°/s))的输出信号。
在积分时间为30 s的情况下,对陀螺信号测试2 h,陀螺输出如图11所示,计算得到零偏稳定性为159.3°/h。该结果一方面受限于激光器频率锁定环路性能,激光器的中心频率和谐振腔谐振频率不稳定,微弱的Sagnac效应信号淹没于激光器的频率噪声之中,虽然激光器频率锁定环路抑制了大部分的激光器频率噪声,但仍有残余的波动引入到陀螺信号中;另一方面,温度的波动导致FRR的两个本征偏振态各自所对应的谐振光波发生叠加与干涉效应,引起谐振曲线的不对称性和本征偏振态之间的干涉,导致谐振频率点的检测误差,从而限制了RFOG的检测精度。
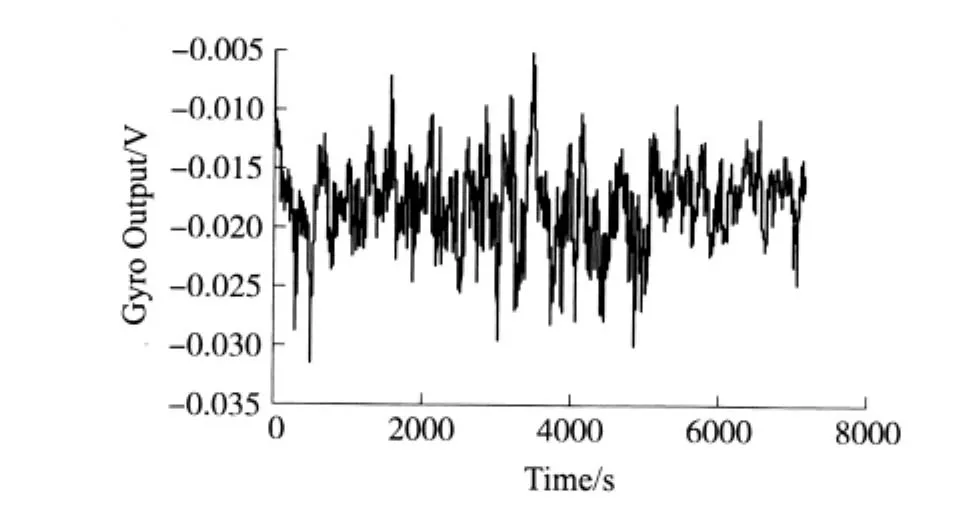
图11 陀螺零偏稳定性测试
4 结语
RFOG相比于目前发展已经比较成熟的干涉式光纤陀螺,具有小型化方面的优势,而数字信号检测系统的精度直接影响陀螺的测试精度。本文基于正负斜率组合锯齿波数字相位调制技术,设计了谐振式光纤陀螺双闭环数字检测系统。采用全数字信号处理技术,将整个陀螺检测系统集成到单片FPGA中。通过测试,验证了激光器闭环锁定环路、2π电压反馈控制环路和第二闭环功能的正确性,有利于谐振式光纤陀螺的小型化和集成化发展。后续工作中,将围绕提高激光器频率锁定精度和第二闭环的精度、克服温度变化引起的漂移等方面作进一步的研究,以提高FROG的检测精度。
[1]Ezekiel S,Balsmo S K.Passive Ring Resonator Laser Gyroscope[J].Appl.Phys.Lett.,1977,30(9):478-480.
[2]Ezekiel S.Optical Gyroscope Options:Principles and Challenges[J].Optical Fiber Sensors,2006,paper MC1.
[3]张旭琳,马慧莲,周柯江,等.调相谱检测技术下谐振式光纤陀螺实验研究[J].传感技术学报,2006,19(3):800-803.
[4]Harumoto M,Hotate K.Resonator Fiber Optic Gyro Using Digital Serrodyne Modulation[J].J.of Lightwave Technol.,1997,15(3):466-473.
[5]Hotate K,WANG Xi-jing,HE Zu-yuan.Resonator Fiber Optic Gyroscope with Digital Serrodyne Scheme Using a Digital Controller[J].SPIE,2009,7314:02-01-02-08.
[6]Strandjord L K,Sanders G A.Effects of Imperfect Serrodyne Phase Modulation in Resonator Fiber Optic Gyroscopes[J].SPIE,1994,2292:272-282.
[7]杨志怀,马慧莲,郑阳明,等.谐振式光纤陀螺数字闭环系统锁频技术[J].中国激光,2007,34(6):814-819.
[8]鲍慧强,毛慧,马慧莲,等.谐振式微型光学陀螺锁频精度分析[J].浙江大学学报(工学版),2010,44(1):94-98.
[9]杨雪峰,郑阳明,马慧莲,等.谐振式光纤陀螺环路锁频技术研究[J].传感技术学报,2007,20(5):990-993.
[10]Kaiser T J,Cardarelli D,Walsh J.Experimental Developments in the RFOG[J].SPIE,1990,1367:121-126.
[11]马慧莲,鲍慧强,王世军,等.二氧化硅光波导环形谐振腔的背向散射特性研究[J].中国激光,2010,37(1):105-109.
[12]MA H L,HE Z Y,Hotate K.Reduction of Backscattering Induced Noise by Carrier Suppression in Waveguide-Type Optical Ring Resonator Gyro[J].J.Lightwave Technol.,2010,Digital Object I-dentifier:10.1109/JLT.2010.2092751.
[13]张维叙.光纤陀螺极其应用[M].北京:国防工业出版社,2008:117-118.
[14]李如春,马慧莲,金仲和,等.数字调制谐振式光纤陀螺中阶梯波复位误差的分析[J].中国激光,2007,31(9):1107-1111.