基于PSD的平台漂移自动化测试仪设计与实现
2011-10-20杨大林汪立新姜泉璐武文斌
杨大林,汪立新,姜泉璐,武文斌
(第二炮兵工程学院 三系,西安 710025)
在进行惯性平台动态漂移速度测试时,采用的是光点反射法。即利用平台台体轴上的测试镜、准直光管和光屏板等光测设备,测量平台台体沿台体轴、内环轴和外环轴的转角。在平台台体上装有六面体反光镜,测试时,用平行光管使光线照射于六面体上,入射角一般要求小于6°,反射光线落在距镜面距离R的光屏上,当平台台体相对于基座转动时,光屏上的光点会缓缓移动。
测量在t时间内水平(或垂直)移动的距离Δl,即相当于台体绕垂直(或水平)轴转动的角度为

其漂移角速度为

一块平面镜可以测得绕两个轴的转动角,整个试验有两套平行光管同时测量三个轴转角,如图1所示[1]。该方法比较简单、直观,但需要人工计时、人工描点,不方便且精度也不高。随着武器装备系统测试自动化和保证测试精度要求的提出,研制一套高精度的平台漂移自动化测试仪显得尤为必要。
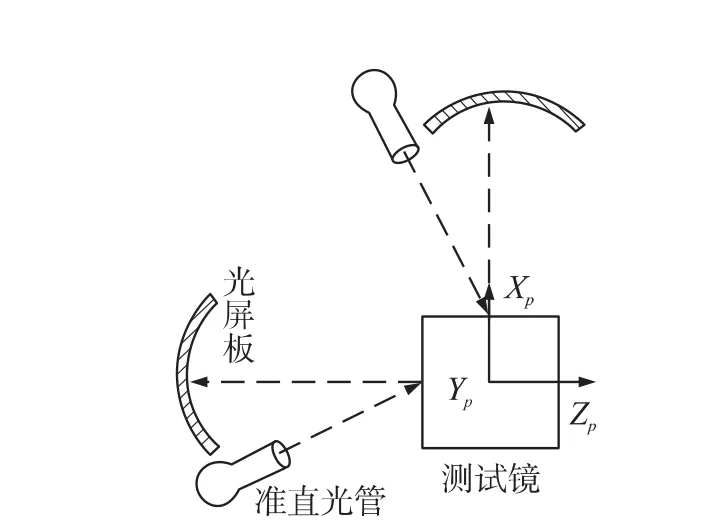
图1 光点反射法测量原理
1 测试仪系统硬件设计与实现
1.1 光学设计
工作原理:激光发生器LD发出细光束经过半反棱镜S,成平行光射出(Z轴为激光光轴)到反射镜上,反射光经由物镜W、三角棱镜E1和目镜M组成的望远镜系统射出到三角棱镜E2上,经E2反射到PSD光敏面上的p点处。当反射面P绕X轴转动微小角度θ时,则从反射面反射光线以与激光光轴成2θ的角度反射到棱镜S上,光线经S到望远镜系统进行角放大,设望远镜放大倍数为k。出射光线经三角棱镜E2反射,以与激光光轴成2kθ的角度照射在二维PSD光敏面上的p'点处。
设二维PSD器件的中心为原点O,PSD距离望远镜系统的距离为L,图中p点的坐标为p(x,y),p'点处的坐标为p'(x',y'),p'点相对于p点的位移为(x″,y″)。由图中的几何关系可得:
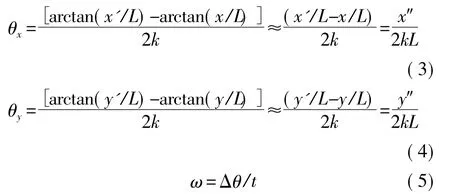
知道光点在PSD光敏面上的位置p(x,y)、反射面转动微小角度θ后的相对位置p'(x',y')以及角度变化Δθ所用的时间t,即可得到平台漂移的瞬时角速度[2]。
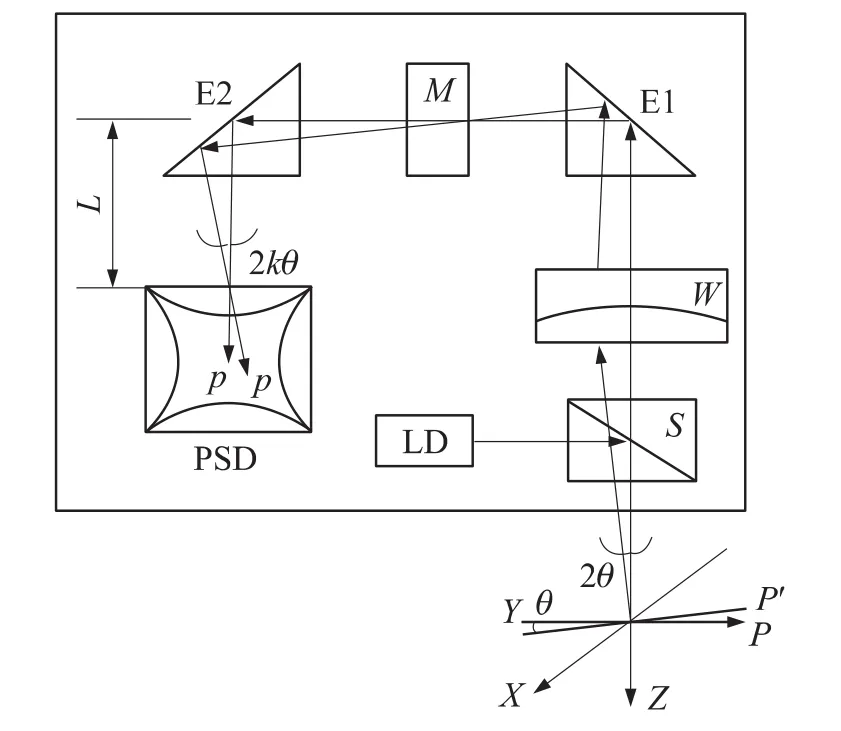
图2 平台漂移自动化测试仪光学结构图
1.2 基于PSD的处理电路设计
硬件电路设计采用模块化思想进行设计,主要包括数据采集模块、单片机控制电路模块、红外遥控模块、液晶显示模块和电源模块五大部分。这五部分构成了PSD测漂移系统。数据采集模块是把入射到PSD的光斑信号转换成量化的数字电压信号,由二维枕型PSD、运算放大器和AD转换等构成;单片机控制电路主要包括使单片机工作的最小系统电路和与外围器件的接口电路,提供数据采集和控制系统中常用的模拟部件和其它数字外设及功能部件;由于测试仪是精密的光电仪器,对外界环境的震动比较敏感。接触性测量会影响仪器的稳定性,增大测试仪的测量误差,所以设计了红外遥控键盘来实现对测试仪复位、开始、结果和显示参数转换的控制。其由发射单元和接受单元组成,编码和发射电路构成一个整体,解码和接受电路构成另外一个整体。接收的信号经过解码后变成所需的电信号,送入单片机后执行相应的控制程序;显示模块中使单片机的P2口和P1.0-P1.2 口来控制12864 显示器的 DB0-DB7、RS、RW 以及E等,从而在显示器上得到需要的人机对话。由于激光发生器对电源的要求特殊,同时为了避免和电路板供电相冲突,所以两者需分开供电。又由于需要提供PSD工作的±12 V的电源,因此电源采用直流线性稳压电源。结构如图3所示。
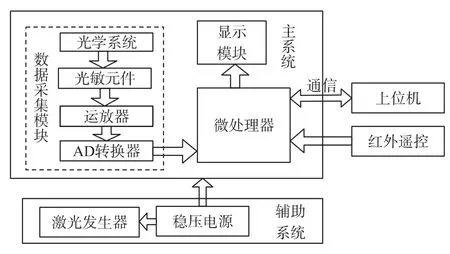
图3 测试仪硬件搭建结构图
1.3 测试仪器件选型
考虑到惯性平台漂移测试±3″的精度要求、系统综合性能以及器件价格等因素,对各器件进行调研,选型如下:
(1)PSD:选用安徽蚌埠集成光电技术研究所生产的二维枕型 PSD[3],有效感光面为 22 mm×22 mm,A区位置最大检测误差为±300 μm,B区位置最大检测误差为±600 μm,位置分辨率为 12 μm[4]。
(2)AD转换器:选用美国BB公司生产的4通道,16位模数转换器。它有单一+5 V电源供电,数据采样及转换时间不超过25 μs,可输入-10 V~+10 V的模拟电压。转换后的数据既可串行输出,也可并行输出[5]。
(3)MCU:选用宏晶科技生产的单时钟/机器周期(1T)、高速/低功耗/超强抗干扰的新一代STC12C5A60S2单片机,其速度比传统8051要快8~12倍。其包含了中央处理器、程序存储器、数据存储器、定时/计数器、UART串口、串口2、高速A/D转换以及看门狗等模块,几乎包含了数据采集和控制中所需的所有单元模块,可称得上是一个片上系统[6]。
(4)显示器:选用128×64点阵的汉字图形型液晶显示模块,可显示汉字及图形,内置8192个中文汉字(16×16点阵)、128个字符(8×16点阵)及64×256点阵显示RAM(GDRAM)。可与CPU直接接口,提供两种界面来连接微处理器:8位并行及串行两种连接方式。具有多种功能:光标显示、画面移位、睡眠模式等[7]。
(5)其它:电源采用+5V稳压电源供电,激光发生器采用日立公司的HL6714G半导体激光器,可输出680 nm可见光,单纵模工作方式,内置监控光电二极管PD,具有低象散。
2 测试仪系统软件设计与实现
软件作为硬件的延伸和人机交互的手段,很大程度上体现了一个系统的可操作性。在设计该测试仪时,为了增强系统的可操作性,能够用软件来完成的操作尽量用软件完成,最大程度避免认为的手动操作[8]。
测试仪软件部分主要包括系统软件和人机交互软件两部分。系统软件主要是完成数据采集、数据输出、输出显示、无线通信以及数据处理等功能,人机交互软件的功能是通过对相关参数的设置、外围设备控制漂移测试系统来对惯性平台围绕三个轴的漂移进行测试,并对测试数据进行处理。之间的关系如图4所示,系统软件程序流程如图5所示。

图5 测试仪软件流程图
3 系统误差修正及试验分析
平台漂移自动化测试仪系统误差通过分析可知,主要包括以下几个部分:PSD器件的误差、硬件电路设计误差、光路设计误差以及其它一些影响测量精度的误差等。为了保证测试仪的测量精度,必须对系统误差进行修正,提高测量仪的整体性能。
PSD器件是仪器的核心部件,它的误差对仪器精度的影响较大[9]。其中PSD的非线性误差是系统误差的主要来源之一。文献[10]采用双一次插值算法对PSD的非线性误差进行修正,提高了PSD自身的测量精度。本测试仪采用RBF神经网络算法对PSD器件的非线性误差进行修正,提高它的线性度。RBF神经网络可看作是一个n维空间中的曲线拟合(逼近)问题,学习等价于在n维空间中寻找一个能够最佳拟合训练数据的曲面,泛化等价于利用这个n维曲面对测试数据进行插值。它具有逼近能力强、学习速度快等优点。该算法通过选择径向基函数中心、确定神经网络隐层神经元的数目和调整每一层的权值和阈值三个步骤,在网络设计过程中,设定目标误差均方差精度以及选取散布常数最优值,对由于PSD非线性产生的误差进行修正,拟合性较好[11-12]。结合实验室的条件,可选择在晚上进行试验,以消除背景光对PSD的影响;选择性能较好的激光发生器、一次试验后仪器冷却足够长时间等方法来减小PSD器件固有噪声的影响。
通过优化电路设计、选择高精度器件(如精密电阻、低ESR电容高精度AD转换器)以及硬件设计与应用软件相结合(软件能实现的功能尽可能由软件实现,以简化硬件结构,但缺点是响应时间长。)等方法来减少硬件设计误差。
通过提高光学器件的安装精度,来减小光路误差对系统测量的精度影响。选择性能较好的激光发生器,尽量保证出射光束强度均匀、功率稳定,减小光斑的大小。
采用算术平均值滤波算法[13-14]对单片机从PSD器件采集的数据进行滤波处理。数字滤波是通过一定的计算机程序对信号作数字化处理,减少干扰在信号中的比重。
试验时,用三轴摇摆台在频率1 Hz、振幅6°的情况下,模拟导弹的飞行,测定平台动态漂移。把平台置于三轴摇摆台上,其动态漂移测试,在静态漂移测试的基础上进行,利用三轴摇摆在频率1 Hz、振幅6°的情况下进行摇摆,每分钟记录一次光点在PSD上的位置,共测10 min,记录十个光点,通过式(3)、式(4)、式(5)即可计算出平台漂移的大小。
在实验室条件下,将测试仪固定在支架上,同时把测试镜固定在三轴摇摆台上。试验前先调整测试仪与测试镜的位置,使测试仪发出的光束照射到平面镜上反射回测试仪,并将光斑的位置尽量调整到PSD敏感区域的中心,使得测试仪显示屏上v1、v2、v3和v4的电压值相接近。锁定摇摆台的X轴或Z轴,小幅度(每次10″)转动摇摆台,当测试仪Y轴方向漂移读数趋于稳定时,观察并记录数据。再将摇摆台回转相同的角度,测试仪复位,反方向小幅度(每次10″)转动,当测试仪Y轴负方向漂移读数趋于稳定时,观察并记录数据。X轴和Z轴测试方法相同。试验时,抽测Y轴方向的测量值情况,结果如表1所示。

表1 Y轴方向测量数据(″)
由上述测量数据可知,在±200″范围内,Y轴方向的测量值误差小于2″。通过多次试验,测试仪通电后在1 h以内的漂移误差均小于2″,达到了惯性平台漂移测试±3″的测量精度要求。
4 结论
以惯性平台漂移测试现状为背景,研发了一台基于新型半导体位置敏感探测器的平台漂移自动化测试仪。该测试仪采用了一种新的光学测量方法,结合先进的半导体光电技术,克服了人工测量复杂、存在人为误差的问题,实现了对角度和角速度的自动化测量。操作简单,能够达到较高的测量精度,在小角度测量领域中具有广阔的应用前景。
[1]朱敬仁.惯性器件测试技术[M].北京:宇航出版社,1991.
[2]李忠科,易亚星.一种新型激光对中仪[P].中国专利:9225143.9.
[3]Henry J,Living stone J.A Comparison of Layered Metal-Semiconductor Optical Position Sensitive Detectors[J].IEEE Sensors,2002,2(4):836-840.
[4]王航.W203光电位置传感器技术参数.蚌埠:蚌埠市集成光电技术研究所.2003.
[5]ADS7825 数据手册[DB/OL].http://www.data sheet5.com/view-4C5CE8F8CA3DD8FA.html,2011-02-03.
[6]单片机STC12C5A60S2中文使用手册[DB/OL].http://download.csdn.net/source/2806661,2010-11-03.
[7]中文字库液晶显示模块使用手册LCD12864[DB/OL].http://dfrobot.com/image/data/PDF/Manual,2010-08-02.
[8]曹静.Dephi程序设计基础教程[M].中国水利水电出版社,2008.
[9]秦岚,刘志辉.PSD相位法测量技术研究[J].传感技术学报,2009,22(5):760-763.
[10]李宗峰.空间微重力环境下主动隔振系统的三维位置测量[J].宇航学报,2010,31(6):1625-1630.
[11]王军号,孟祥瑞.一种基于改进遗传RBF神经网络的传感器动态特性补偿算法[J].传感技术学报,2010,23(9):1298-1302.
[12]史忠植.神经网络[M].高等教育出版社,2009.
[13]胡伟,季晓衡.单片机C程序设计及应用实例[M].北京:人民邮电出版社,2003.
[14]牛余朋,成曙.单片机数字滤波算法研究[J].中国测试技术,2005,31(6):97-99.