数字式传感器在汽车衡中的角差校准
2011-10-18刘尹霞訾贵昌
刘尹霞 訾贵昌
(辽宁工程技术大学应用技术学院,辽宁 阜新 123000)
数字式传感器在汽车衡中的角差校准
刘尹霞 訾贵昌
(辽宁工程技术大学应用技术学院,辽宁 阜新 123000)
介绍了数字式传感器的优点,及其在电子汽车衡中的应用,经过实践总结,通过实例,分析角差的校准方法。
数字式传感器;角差;校准
(一)序言
在工业过程控制中,由于生产的连续运转,对设备的可靠性有着较高的要求,采用了很多技术来保证测量和控制的可靠。称重系统希望能及时了解各个传感器工作状态,并及时发现故障。由于传统的称重方式是由多个模拟传感器的信号经过接线盒并接后成为一路信号,每个传感器的信号就不再是可独立辨别的,仪表无法在线发现问题,进行故障定位,就很难满足连续生产中高可靠性的要求,数字式传感器应运而生,显示出独特的优势。
(二)数字式传感器在汽车衡中的应用
数字称重传感器是在传统模拟称重传感器基础上,结合现代微电子技术、微型计算机技术的集成而发展起来的一种新型电子称重技术。它由模拟称重传感器和数字化转换(A/D)模块两部分组成,数字模块是高度集成化的电子电路,采用SMT表面贴装技术制成。数字称重传感器采用RS485接口实现通讯,最多可外接 32只数字称重传感器,可进行手动/自动偏载调节(四角调整),可自动对单只传感器寻址并读取数据,可现场自动修改传感器编号,可实现对数据的处理,如显示、标定、发送、存储、打印等功能。数字式传感器具有可靠性高、有故障报警提示、一致性好,免标定、角差容易调整、传输距离远,通信速度快,防作弊效果显著等种种优点。数字式电子汽车衡称重系统的结构框图如图1所示:
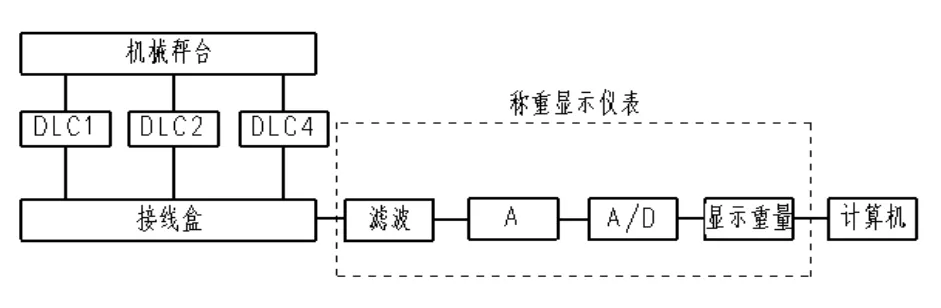
图1 数字式电子汽车衡系统的组成结构
载荷(一般指货物或货车等)进入承载器上,在物体重力作用下,使称重传感器弹性体产生变形,粘贴于弹性体上的应变计桥路阻抗失去平衡,输出与重量数值成比例的电信号,经传感器内部的放大器、A/D转换器、微处理器等电子元器件进行相应的数据处理,输出数字信号,各传感器数字信号经接线盒进入称重显示仪表直接显示出称量数据。如果显示仪表与计算机、打印机连接,仪表可同时把重量信号输给计算机等设备,组成称量管理系统。
数字称重传感器应用于电子汽车衡称重系统具备以下特点:
(1)可靠性高,抗干扰能力强,防雷性能好:数字传感器防护等级达到IP68,增加了各种保护电路和防雷击设计,保证了传感器的正常工作。
(2)不间断工作:数字称重系统能保障生产的连续性,仪表不但时刻监测着各个数字传感器的工作状况,而且在发现某个传感器故障时,可以自动启动不间断工作方式,仍然能保障一定时间一定精度下的称重,不至于造成生产停机。同时仪表会发出信号给用户,定位故障传感器要求更换。
(3)免标定:数字传感器在生产中已对传感器输出进行了标定,仪表读取到的就是数字传感器实际测量到的重量值,中间没有任何损耗,因此可以实现免标定。
(4)传输距离远、通信速度快、防作弊效果显著:输出数字信号,不易受到干扰,按照现场总线通信协议传输,通信速度是普通 RS485的十倍,高速且具通信纠错能力,保证了数据快速可靠。由于协议的保密现场无法作弊。
(5)角差容易调整:数字传感器组成的秤体,只要在各角加一遍载荷,仪表即可计算出各点的角差系数,可自动进行秤的角差调整,免去了反复加载砝码的麻烦,提高了效率。一遍加载即可完成角差调整,非常简便快捷。
(6)维护方便:使用军标的航空插头,更换传感器或电缆更方便,不用穿电缆线。由于传输的是数字信号,电缆线的长度可根据需要改变,不会影响测量精度。
(7)系统整体成本低:虽然增加了电路板,但减少了调试及应用成本,能够进行免标定,更换传感器不需重新标定等,提高了系统可靠性,降低了停机时间。
系统安装好后开始校角差,安装没有发生倾斜,作用力等于反作用力,从而没有倾斜角度误差。而如果有5 度的倾斜角度。假设F=30000kg ,其反作用力也就是传感器感知的力为F’。
则 F’=(1/cos5)*30000kg=1.0038*30000kg=30114.6kg
那么角差为114.6kg。
实际工作中我们经常用5t 的砝码压角差。F=5000kg其反作用力也就是传感器感知的力为F’。
则 F’= (1/cos5) * 5000kg = 1.0038 * 5000kg = 5019kg
角差为19kg。
除了安装平面的倾斜,还有的受力压头的安装倾斜,另外还有压头和钢球平面位置偏移造成的误差。由于受力压头内部为圆弧面,所以偏移一定距离后也会形成角差。在整个系统中,每个传感器的各种角度倾斜会形成一个整体的影响,一般都是误差累加。
(三)角差的校准
模拟式调角差是一件繁琐的事情,由于每个传感器的输入输出电阻不能一致、零点输出不能一致、灵敏度不能一致,调整时又会相互影响。没有一定时间具体从事和摸索调试起来难度是很大的。而数字的调整就非常方便,即使有误差调整时是不会相互影响的。步骤为:
A.设置仪表相关参数,如:分度值(压角时一般取1 至10kg)、传感器个数、量程等等。
B.空秤台置零。
C.把砝码放在秤台中间进行标定,标定后显示的总量值就是调角差的参考值。
D.校角差一般从1 号角开始进行,然后按顺序一直到最后一个角。
比如5 吨砝码放到一号角后,观察仪表读数,如果大于5吨则把仪表中对应的角差系数变小;如果小于5 吨则把角差系数变大。每一个传感器在仪表中都有一个对应的角差系数可供用户修改。
传感器角差系数计算公式:K′= (1–E÷L)×K,其中加载砝码为L,其误差为E,原传感器角差系数为K,出厂时各传感器角差系数为1.000。
例如:汽车衡压角砝码为10 吨,每一个角都压一次,然后记录下来。
在1号传感器压角显示10002
在2号传感器压角显示10000
在3号传感器压角显示9998
在4号传感器压角显示9996
在5号传感器压角显示10000
在6号传感器压角显示10000
在7号传感器压角显示10000
在8号传感器压角显示10000
其中1,3,4号传感器有误差需修改各传感器角差系数,代入传感器角差系数计算公式中计算结果如下:
1号传感器角差系数=(1–(2÷10000))×1.0000=0.9998
3号传感器角差系数=(1–(-2÷10000))1.0000=1.0002
4号传感器角差系数=(1–(-4÷10000))×1.0000=1.0004
将计算结果输入到各个传感器输出系数中,如误差(E)很大,则需进行多次调整。
[1] 孟立凡.传感器原理及应用[M].北京:国防工业出版社,2005.
[2] 刘伟.传感器原理及实用技术[M].北京:电子工业出版社,2006.
[3] 何希才.传感器及其应用电路[M].北京:电子工业出版社,2001.
[4] 唐文炳.电子衡器使用与维修[M].北京:中国计量出版社,2005.
TH715
B
1008-1151(2011)06-0102-01
2011-03-15
刘尹霞(1976-),女,四川资阳人,辽宁工程技术大学应用技术学院电气工程系讲师,硕士研究生,从事智能测试与控制的研究。
