基于模糊控制的军用铅酸蓄电池充电控制技术
2011-10-08杨亚丽马晓军曾凡果袁文涛
杨亚丽,马晓军,曾凡果,袁文涛
(1.装甲兵工程学院控制工程系,北京100072;2.95963部队,湖北 武汉430313)
目前,我军装甲车辆的主要电能源是由铅酸蓄电池提供的。蓄电池的各项性能参数(电动势、内阻、荷电状态、自放电率、温度等)在充、放电过程中,存在着错综复杂的关系,具有高度的非线性[1]。传统的控制系统是建立在被控对象精确数学模型基础之上的,如果被控对象的数学模型很复杂或者数学模型无法建立,控制系统就较难实现。蓄电池充电正是属于这种情况,而模糊控制技术恰好能弥补这一不足,该技术是以模糊集合理论为基础的控制手段,是模糊系统理论、模糊技术与自动控制技术相结合的产物。因此,笔者考虑采用模糊控制技术改进现有的蓄电池充电控制,以实现快速无损充电。
1 模糊控制充电装置总体设计
图1是模糊控制充电装置的总体设计框图。其中:Δu/Δt和ΔT/Δt分别为单位时间内检测到的电压变化量和温度变化量;u*k为经过模糊控制器的输出控制值,通过充电控制电路转化为可执行的实际充电电流控制量i*;u*为蓄电池端电压;u*a为前一时刻蓄电池端电压;T*为蓄电池内部电解液温度。
2 模糊控制器设计
2.1 输入量和输出量的选取
模糊输入、输出变量的选择直接关系到模糊控制系统的输出。在可实现的前提下,一般选取能够快速、准确地反映被控对象状态的变量作为模糊输入变量。
电池充电时,充入的电能除了转化为化学能外,由于电流通过欧姆内阻和极化内阻,部分电能转化成热能[2]。当电化学物质转化完毕时,再充入的电能就全部转化为热能,这些热能使电池温度升高,因此充电过程蓄电池端电压、温度的变化影响着充电电流大小。笔者拟采用双输入单输出的模糊控制器[3],其中:一个输入 Δu/Δt为前后 2 次采样电压的变化率,另一个输入为蓄电池温度变化率ΔT/Δt,Δt均为采样周期;单输出为控制电压uk,由其通过主电路控制充电电流。
2.2 精确量的模糊化
模糊化是将精确量转换成模糊量的过程。其具体过程需要进行量化、模糊划分和模糊表达:量化的实质是把连续输入的精确值离散化;模糊划分就是对论域范围确定模糊量的个数;模糊表达就是对模糊量的隶属函数进行定义。
输入量ΔT/Δt可分为5个模糊状态:VS(非常小)、S(小)、M(中)、L(大)、VL(非常大)。对应的模糊化论域{1,2,3,4,5,6,7,8,9}为温度变化值,表示温度在单位时间内上升1个单位、2个单位…9个单位,其中1个单位代表单位时间变化0.1℃,时间单位定在200 ms,也可以根据具体要求改变。ΔT/Δt的三角隶属函数曲线如图2所示。

图2 ΔT/Δt的三角隶属函数曲线
对于输入的变量Δu/Δt,在蓄电池充电时端电压的变化曲线图中,其最大变化率是蓄电池在充电阶段前端和进入终止判决前的一段[4]。根据查阅的大量资料、蓄电池的技术指标和多次实验记录数据,以标称12 V铅酸蓄电池为例,Δu/Δt的最大变化率为14.72 ×10-4V/s[5]。对[0,14.72 ×10-4]连续论域,由量化因子量化成一个离散论域{-3,-2,-1,0,1,2,3},根据充电过程的长期试验测试,在设计模糊表达时采用梯形模型构造隶属函数,同时,在论域的“最正”和“最负”的模糊量处采用一边恒为值“1”的不对称梯形,采用5个语言值NB(负大),NS(负小),Z(零),PS(正小),PB(正大)。Δu/Δt的梯形隶属函数如图3所示。

图3 Δu/Δt的梯形隶属函数曲线
由于输出充电电流i≥0,因此模糊控制器的输出 uk的论域取为{0,1,2,3,4,5,6,7,8,9,10};模糊集取为{OVS,OS,OM,OL,OVL}。其中:OVS 为正非常小;OS为正小;OM为正中;OL为正大;OVL为正非常大。uk的三角隶属函数曲线如图4所示。

图4 uk的三角隶属函数曲线
2.3 模糊控制规则表及查询表
控制规则是模糊控制器的核心部分,需要技术人员在经验积累的基础上不断通过实验加以修正,最后确定最佳方案。根据实践经验制定的控制规则表如表1所示。

表1 控制规则表
MATLAB模糊逻辑工具箱提供了模糊推理输入输出曲面视图。由上述的模糊推理规则可得如图5所示的模糊推理输入输出曲面观察界面。
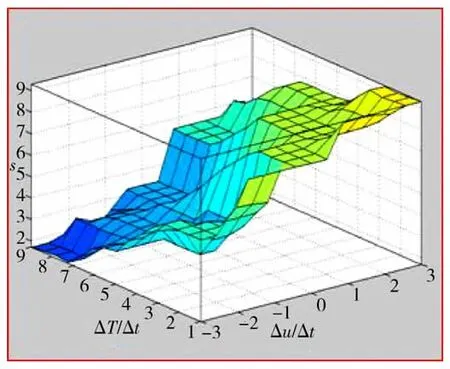
图5 模糊控制曲面图
在模糊控制系统中,模糊控制器的输出是模糊量。对于实际的被控对象,它所需要的控制信号是有一定物理意义的精确值。为了能对被控对象进行控制,需要把它输出的模糊量转换成精确量,这个过程称为反模糊化。反模糊化的方法很多,但在控制上所用的反模糊化方法一般只有3种:最大隶属度法、中位数法和重心法。为获得更精确的输出控制量,本文采用min-max重心法反模糊化。表1所示的模糊控制规则经模糊集合运算,再经min-max重心法解模糊得模糊控制查询表,如表2所示。

表2 模糊控制查询表
3 模糊控制充电系统
3.1 硬件实现
图6为模糊控制充电器的总体设计框图,该控制器的单片机采用MCS-96系列中的准16位单片机8098,具有16位机的高速运算能力。程序存储器则采用容量为8 kB×8的EPROM2764,配以相应的I/O接口电路,从而构成本系统硬件控制核心。交流装置部分为充电控制系统的主电路和控制电路部分;信号检测部分是对待充电池的端电压、充电电流、温度的检测及信号转换;检测温度用的热敏电阻放在电池槽内。在交流装置中,系统将信号检测部分传来的数据通过单片机8098中的模糊控制算法,计算下一时刻充电电流的大小,并由模糊控制器输出给控制电路,控制电路最终产生的PWM波改变充电主电路中开关管的占空比,以实现对待充电池的实时充电。信号检测部分的实时数据和交流装置计算的下一时刻充电电流数据通过CPU在键盘上显示。程序存储器EPROM2764存放模糊控制表和查询表。

图6 模糊控制充电系统组成框图
3.2 工作流程
用模糊控制实现充电控制时,就是将表2存入EPROM。表2中,当 ΔI/Δt和 Δu/Δt的论域分别取1和-3时,模糊控制器输出的反模糊值为0.2,即u*R=u*(i,j)=u*(1,1)(i=1,2,…,6;j=1,2,…,9),将u*(1,1)的地址作为查表运算的首地址。其他各模糊值地址由A[u(i,j)]=首地址+[(i-1)×9+j]算得。由此将表2的内容依次存入对应的地址单元内。单片机根据每次输入量的不同组合进行查表运算,求出控制量的大小。程序的流程采用模块化设计,便于修改和维护。中断程序的流程如图7所示。

图7 中断程序流程
4 实验验证

表3 实验数据表
[1]高田.蓄电池快速充电模糊控制技术研究[J].计算机仿真,2006(10):236-238.
[2]何昂,张文宽,陈守玉.蓄电池手册[Z].北京:755厂翻译出版组,1987:211 -215.
[3]章卫国,杨向忠.棋糊控制理论与应用[M].西安:西北工业大学出版社,2004:157-179.
[4]李敬兆.基于模糊控制的智能充电装置研究[J].煤炭科学技术,2001,29(7):38 -41.
[5]Coleman M,Hurley W G.An Improved Battery Char Acterization Method Using a Two-pulse Load Test[J].IEEE Transactions on Evergy Conversion,2008,23(2):708 -713.
[6]杨亚丽,李匡成,陈涛,等.一种基于最小二乘法在线估计蓄电池荷电状态的方法[J].电测与仪表,2010,47(3):16 -19.
